Vous aimerez peut-être aussi
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- CH Grafcet PDFDocument41 pagesCH Grafcet PDFNabilBouabanaPas encore d'évaluation
- GrafcetDocument21 pagesGrafcetyouri59490100% (1)
- Examen de Fin de Module Installation Entretien Commande A TBT TemiDocument2 pagesExamen de Fin de Module Installation Entretien Commande A TBT TemisbensouayahPas encore d'évaluation
- Traitement Des Lingots-TD g7Document16 pagesTraitement Des Lingots-TD g7Boutch NkgPas encore d'évaluation
- ControleDocument6 pagesControleمحفوظ سعيدPas encore d'évaluation
- 1-Principe de Programmation LadderDocument13 pages1-Principe de Programmation LadderElmokh LassaadPas encore d'évaluation
- Découverte Platform Node RedDocument19 pagesDécouverte Platform Node RedHajar ElattariPas encore d'évaluation
- Correction Cours 2ATDocument6 pagesCorrection Cours 2ATMed Aymen Bensalem100% (2)
- 9 8 TD 4 Sujet PDFDocument5 pages9 8 TD 4 Sujet PDFDivin MakitaPas encore d'évaluation
- Chapitre V - Cours - TEAI - 5Document12 pagesChapitre V - Cours - TEAI - 5Wã Lïd SãådätPas encore d'évaluation
- Rapport BE - SME - EzzainabiDocument23 pagesRapport BE - SME - EzzainabiHassanZainabiPas encore d'évaluation
- Sequenceur MDocument3 pagesSequenceur Mi kPas encore d'évaluation
- Chapitre 1 Grafset (API)Document12 pagesChapitre 1 Grafset (API)priankasy679Pas encore d'évaluation
- Cours Systémes Echantillonnés 1Document13 pagesCours Systémes Echantillonnés 1Shompinho Matloaa100% (1)
- TD n3 PDFDocument3 pagesTD n3 PDFsaadoniPas encore d'évaluation
- ! Exercices - Systemes-Sequentiels - Fonctions-MémoiresDocument9 pages! Exercices - Systemes-Sequentiels - Fonctions-MémoiresTimo ShmittPas encore d'évaluation
- SysysesyDocument7 pagesSysysesyAZEDDINEPas encore d'évaluation
- TD Api GsiDocument4 pagesTD Api Gsikhawlaaaa100% (1)
- APIDocument19 pagesAPIhalim otmanePas encore d'évaluation
- TD 1 Commande Séquentielle 2023Document11 pagesTD 1 Commande Séquentielle 2023pythagoretenkamPas encore d'évaluation
- Serie Exo AutomatismesDocument8 pagesSerie Exo AutomatismesSalimMalekPas encore d'évaluation
- Commande Electronique Des Machines ElectriquesDocument28 pagesCommande Electronique Des Machines ElectriqueshassenbbPas encore d'évaluation
- Allumer Et Éteindre Des LEDs Avec Smartphone Et ArduinoDocument14 pagesAllumer Et Éteindre Des LEDs Avec Smartphone Et ArduinoMahamat Youssouf YassirPas encore d'évaluation
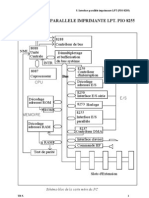
- L'Interface Parallele 8255ADocument30 pagesL'Interface Parallele 8255ARima ChemloulPas encore d'évaluation
- Exercices Sur Le Grafcet PCDocument1 pageExercices Sur Le Grafcet PCDeepak Pathania100% (1)
- Ouvre-Portail (Projet Réalisé Par Pic)Document8 pagesOuvre-Portail (Projet Réalisé Par Pic)Hamza DhPas encore d'évaluation
- DR Boukezata Boualem Asservissement Lineaire Continu Licence 3 ElecDocument300 pagesDR Boukezata Boualem Asservissement Lineaire Continu Licence 3 ElecReda BadroPas encore d'évaluation
- Automate TSX 17 Cours PDFDocument16 pagesAutomate TSX 17 Cours PDFRastate0% (1)
- TD 1 MentouriDocument8 pagesTD 1 MentouriAymen TertagPas encore d'évaluation
- Manipulation: Capteurs de Déformation, de Force Et de PressionDocument22 pagesManipulation: Capteurs de Déformation, de Force Et de PressionMariam SajidPas encore d'évaluation
- Simulation Des ConvertisseursDocument9 pagesSimulation Des ConvertisseurslonsaiyPas encore d'évaluation
- Bloc Compteur s7 PDFDocument3 pagesBloc Compteur s7 PDFNabilBouabanaPas encore d'évaluation
- GradateurDocument12 pagesGradateurFouad ElhajjiPas encore d'évaluation
- Cours Lois Électriques 1Document4 pagesCours Lois Électriques 1AFAFPas encore d'évaluation
- ARS2 TPE Moteur Pas A PasDocument4 pagesARS2 TPE Moteur Pas A PasbernardlacsapPas encore d'évaluation
- Examen APIDocument4 pagesExamen APIHana Khemissi100% (1)
- Programmation Des API Part - 1Document34 pagesProgrammation Des API Part - 1sami bmPas encore d'évaluation
- Instru Cours01 668 E02 V3Document132 pagesInstru Cours01 668 E02 V3Oudjoud KeddourPas encore d'évaluation
- Chaine D'energieDocument12 pagesChaine D'energieMohamed LarbiPas encore d'évaluation
- ch4 CircuitscombinatoiresDocument8 pagesch4 CircuitscombinatoiresKais BouzraraPas encore d'évaluation
- Travaux Dirigés: Systèmes AutomatisésDocument7 pagesTravaux Dirigés: Systèmes AutomatisésAnas YassinePas encore d'évaluation
- Grafcet LaderDocument10 pagesGrafcet Laderhicham raghaiPas encore d'évaluation
- Presentation ZelioDocument7 pagesPresentation Zeliosaidloubar100% (1)
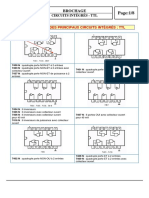
- Brochage Des Principaux CI-TTL PDFDocument8 pagesBrochage Des Principaux CI-TTL PDFFerjani Mohamed100% (1)
- Marquage Oeufs Séquenceur CorrectionDocument4 pagesMarquage Oeufs Séquenceur Correctionsoumeya100% (1)
- TP Automate ProgrammableDocument8 pagesTP Automate ProgrammableSamba SallPas encore d'évaluation
- Chapitre N1 Grafcet SystèmeDocument2 pagesChapitre N1 Grafcet SystèmeMarouen MekkiPas encore d'évaluation
- Demarrage Des Moteurs - V2k6Document28 pagesDemarrage Des Moteurs - V2k6Jamel Riahi100% (1)
- Amplificateurs OpérationnelsDocument30 pagesAmplificateurs OpérationnelsNGAMIJEPas encore d'évaluation
- Mini ProjetDocument2 pagesMini ProjetPretty Bea100% (1)
- Chapitre 2 Redresseurs CommandesDocument17 pagesChapitre 2 Redresseurs Commandesadda chariPas encore d'évaluation
- Programmation de L'interface ParallèleDocument10 pagesProgrammation de L'interface ParallèleAbdeltif BelquorchiPas encore d'évaluation
- Verins Pneumatiques E12c-2Document2 pagesVerins Pneumatiques E12c-2dsiscnPas encore d'évaluation
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueD'EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriquePas encore d'évaluation
- IntroductionDocument80 pagesIntroductionnagazi moezPas encore d'évaluation
- Résumé ÉnergieDocument7 pagesRésumé Énergiemimita mahboulistaPas encore d'évaluation
- 12fee Fonctionnement D Une Eolienne PDFDocument2 pages12fee Fonctionnement D Une Eolienne PDFsaidPas encore d'évaluation
- Autotransformateurs VariablesDocument4 pagesAutotransformateurs VariablesDiana ZouaPas encore d'évaluation
- Application Des Aimants Aux Machines ÉlectriquesDocument37 pagesApplication Des Aimants Aux Machines ÉlectriquesBah BrahimPas encore d'évaluation
- Processus Production BillettesDocument104 pagesProcessus Production BillettesnoureddinePas encore d'évaluation
- Groupe Électrogène Diesel Industriel - 50 HZ: Caractéristiques Générales KOHLER, Haute QualitéDocument7 pagesGroupe Électrogène Diesel Industriel - 50 HZ: Caractéristiques Générales KOHLER, Haute QualitéSalah Ben BrikPas encore d'évaluation
- Les Machines Synchrones 2019-2020Document81 pagesLes Machines Synchrones 2019-2020sawadogo100% (3)
- Traduction Don SmithDocument23 pagesTraduction Don SmithAnonymous jLIj43ZWcG100% (1)
- Exercices Exponentielle CorrigesDocument10 pagesExercices Exponentielle CorrigesYoussef ElalaouiPas encore d'évaluation
- Circuit ElectriqueDocument5 pagesCircuit Electriquecharef loumaPas encore d'évaluation
- Plan D'etudes GPDocument184 pagesPlan D'etudes GPجعدبندرهمPas encore d'évaluation
- 110Document8 pages110Amine ScoutPas encore d'évaluation
- Laboratoire D'électrotechnique: 1. Charge Et Décharge Du Condensateur Sous Tension RectangulaireDocument23 pagesLaboratoire D'électrotechnique: 1. Charge Et Décharge Du Condensateur Sous Tension RectangulaireLéo GallacioPas encore d'évaluation
- Liste Des Figures - CopieDocument6 pagesListe Des Figures - CopieSouhila Hors LignePas encore d'évaluation
- Exercices MACHINES PF31 - 104250Document109 pagesExercices MACHINES PF31 - 104250stephaneateufack98Pas encore d'évaluation
- Fonctionnement AvionDocument19 pagesFonctionnement Avionjacques EDOHPas encore d'évaluation
- CH03 Integration Des Systemes Éioliens 2024Document22 pagesCH03 Integration Des Systemes Éioliens 2024energiesrenouvelables25Pas encore d'évaluation
- Stabilité Des Réseaux ÉlectriquesDocument9 pagesStabilité Des Réseaux ÉlectriquesPlatini KuedaPas encore d'évaluation
- Electronique - Base CoursDocument68 pagesElectronique - Base CoursKawtar Ait naniPas encore d'évaluation
- Moteur À Courant ContinueDocument6 pagesMoteur À Courant ContinueAurelien Christ L'angePas encore d'évaluation
- Regulation de La Vitesse DDocument8 pagesRegulation de La Vitesse Dbadre989100% (2)
- Memoir Ismail HamitDocument84 pagesMemoir Ismail HamitAbdelilah HilaliPas encore d'évaluation
- Ms ELN Boussaid+Morad PDFDocument128 pagesMs ELN Boussaid+Morad PDFmechtoub sofianePas encore d'évaluation
- Cours MCC 4e-BS2 2022Document19 pagesCours MCC 4e-BS2 2022Abdoulaye baPas encore d'évaluation
- Presser La Touche F5 Pour Faire Apparaître Les Signets Qui Favorisent La Navigation Dans Le DocumentDocument11 pagesPresser La Touche F5 Pour Faire Apparaître Les Signets Qui Favorisent La Navigation Dans Le DocumentAZZOUZ MOHAMMED CHARIFPas encore d'évaluation
- Solution TD - Séries 1 2 3 - REI - Jnvier2018Document17 pagesSolution TD - Séries 1 2 3 - REI - Jnvier2018jyPas encore d'évaluation
- Etude Expérimentale Des Propriétés de Fonctionnement D'un Moteur Asynchrone À Cage D'écureuilDocument8 pagesEtude Expérimentale Des Propriétés de Fonctionnement D'un Moteur Asynchrone À Cage D'écureuilbourja ilyassPas encore d'évaluation
- Duogen Documentation TechniqueDocument29 pagesDuogen Documentation TechniquevassindouPas encore d'évaluation