Vous aimerez peut-être aussi
- Réfraction de La HouleDocument27 pagesRéfraction de La HoulekimPas encore d'évaluation
- CoursDocument39 pagesCoursxe.pav12Pas encore d'évaluation
- Hydraulique Maritime-EHTP-Modèle de La Houle LinéaireDocument26 pagesHydraulique Maritime-EHTP-Modèle de La Houle LinéaireOthmane RihaniPas encore d'évaluation
- Chap 3 (Conception D'un Port) (Version Corrigée)Document179 pagesChap 3 (Conception D'un Port) (Version Corrigée)khaoulaPas encore d'évaluation
- Houle RéelleDocument34 pagesHoule RéelleA RHPas encore d'évaluation
- Projet PortDocument30 pagesProjet PortRachid DaoudiPas encore d'évaluation
- Modélisation Hydraulique Bidimensionnelle À L'aide Du Logiciel MIKE 21Document175 pagesModélisation Hydraulique Bidimensionnelle À L'aide Du Logiciel MIKE 21Anas HamdiPas encore d'évaluation
- Action de La Houle Sur Un ObstacleDocument70 pagesAction de La Houle Sur Un ObstaclejbdevaulxPas encore d'évaluation
- Chapitre 3 La Houle RéelleDocument46 pagesChapitre 3 La Houle RéellebouraadaPas encore d'évaluation
- Théories de La Houle Houle Réelle Propagation de La HouleDocument201 pagesThéories de La Houle Houle Réelle Propagation de La Houlekbenjika100% (1)
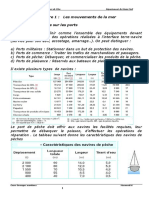
- Chap 1 Cours OM Les Mouvements de La MerDocument5 pagesChap 1 Cours OM Les Mouvements de La MerRAHMA ABDELLIPas encore d'évaluation
- M2GPC 2021 IntroductionDocument232 pagesM2GPC 2021 IntroductionHajar Abunaeem50% (2)
- Petits Barrages Et Digues Deversantes Jan.95Document81 pagesPetits Barrages Et Digues Deversantes Jan.95Wambié NagaroPas encore d'évaluation
- HoulesDocument60 pagesHoulesAbdesslam GuennouniPas encore d'évaluation
- Cours Des Travaux MaritimesDocument47 pagesCours Des Travaux MaritimesingPas encore d'évaluation
- Travaux MaritimesDocument13 pagesTravaux MaritimesCheraiti AbdelmoumenePas encore d'évaluation
- Mini-Projet Travaux Maritimes EMG-Caisson 2021-2022Document3 pagesMini-Projet Travaux Maritimes EMG-Caisson 2021-2022Fisso Ben BenPas encore d'évaluation
- Rattrapage Hydraulique Maritime EMG 2019-2020Document3 pagesRattrapage Hydraulique Maritime EMG 2019-2020Ilias Younessi100% (1)
- CH 01Document61 pagesCH 01simoPas encore d'évaluation
- 3 - Les - Ouvrages - en - Enrochement - Travaux Maritimes, Portuaires Et CôtièresDocument34 pages3 - Les - Ouvrages - en - Enrochement - Travaux Maritimes, Portuaires Et CôtièresGrégoire Abessolo100% (1)
- Ouvrage de ProtectionDocument21 pagesOuvrage de ProtectionbouraadahakimPas encore d'évaluation
- ENPC - Calcul VentDocument23 pagesENPC - Calcul VenttarekhocinePas encore d'évaluation
- RapphouleVfinale 16-04-2014Document33 pagesRapphouleVfinale 16-04-2014Deanna BarrettPas encore d'évaluation
- Analyse Spectrale Des VagueDocument14 pagesAnalyse Spectrale Des VaguebouraadaPas encore d'évaluation
- Détermination de La Houle ExtrêmeDocument10 pagesDétermination de La Houle ExtrêmebouraadaPas encore d'évaluation
- Chapitre I - Hydraulique MaritimeDocument97 pagesChapitre I - Hydraulique MaritimeBadr FaroukPas encore d'évaluation
- Barrage Hydraulique 4e 1Document11 pagesBarrage Hydraulique 4e 1Soloniaina Nomenjanahary NIRIANTSOA ANDRIANATOANDROPas encore d'évaluation
- DiguesDocument55 pagesDiguesmahdouchfkiPas encore d'évaluation
- Exercices HydrodynamiqueDocument2 pagesExercices HydrodynamiqueSawab Madene100% (1)
- TD Hydraulique Maritime EMG 2020-2021Document6 pagesTD Hydraulique Maritime EMG 2020-2021Fisso Ben Ben100% (1)
- Ouvrages MaritimesDocument63 pagesOuvrages MaritimesYouness CharihPas encore d'évaluation
- Travaux Maritimes-ConvertiDocument9 pagesTravaux Maritimes-ConvertiAmira RaniaPas encore d'évaluation
- Ouvrages07 MursVerticauxDocument19 pagesOuvrages07 MursVerticauxmichalakis483Pas encore d'évaluation
- Memento de Stabilite 1Document17 pagesMemento de Stabilite 1Abd OuPas encore d'évaluation
- Théorie de La HouleDocument58 pagesThéorie de La HouleAbdelhak HasnaouiPas encore d'évaluation
- Exercice N° HU 0301 - Corrigé - LTHEDocument5 pagesExercice N° HU 0301 - Corrigé - LTHEothmane ouajarPas encore d'évaluation
- Rapport PFE FinalDocument126 pagesRapport PFE FinalABDELLAHPas encore d'évaluation
- La Houle IntroductionDocument13 pagesLa Houle IntroductionAbdelhak Hasnaoui0% (1)
- Digues PDFDocument55 pagesDigues PDFHanane In'Hid100% (1)
- Hydraulique Maritime Et Fluviale (Y. Argun ISIN) PDFDocument309 pagesHydraulique Maritime Et Fluviale (Y. Argun ISIN) PDFJeremie NsomiPas encore d'évaluation
- Excellent DigueDocument105 pagesExcellent DiguerymouachPas encore d'évaluation
- WMS TutoDocument16 pagesWMS TutoAmale BounnahPas encore d'évaluation
- Cours Ouvrages Portuaires Partie 2Document91 pagesCours Ouvrages Portuaires Partie 2Illiana FannangPas encore d'évaluation
- Ouvrages de Protection Des PortsDocument55 pagesOuvrages de Protection Des PortsCOUPEL audranPas encore d'évaluation
- Chap 4 Cours OM Les Plates Formes PétrolièresDocument7 pagesChap 4 Cours OM Les Plates Formes PétrolièresRAHMA ABDELLIPas encore d'évaluation
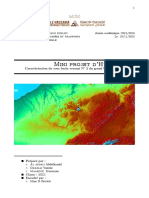
- Mini Projet Hydro LogieDocument17 pagesMini Projet Hydro LogieAbdelhamid Dehayni AL AbdaliPas encore d'évaluation
- Etude Localisations Prise Eau de Mer POA PDFDocument55 pagesEtude Localisations Prise Eau de Mer POA PDFbioboniPas encore d'évaluation
- Mini Projet Fond at I OnDocument6 pagesMini Projet Fond at I OnAbdelhamid Dehayni AL Abdali50% (2)
- BEST COURS Hydraulique en ChargeDocument99 pagesBEST COURS Hydraulique en ChargeAbdelaàli Ouhdoud100% (1)
- Mini-Projet Maritime 5eme GC1Document7 pagesMini-Projet Maritime 5eme GC1Fisso Ben BenPas encore d'évaluation
- 31 Annexe 2 v1 Edd - Note de Calculs Evacuateur de CruesDocument17 pages31 Annexe 2 v1 Edd - Note de Calculs Evacuateur de CruesYacine Rajah100% (1)
- Guide Bathymetrie PDFDocument25 pagesGuide Bathymetrie PDFJihen HarbaouiPas encore d'évaluation
- Tunisie - Etude de Protection Inondations Des Zones Nord EteEst Et Du Grand Tunis - Rapport D'évaluationDocument35 pagesTunisie - Etude de Protection Inondations Des Zones Nord EteEst Et Du Grand Tunis - Rapport D'évaluationAnonymous 1FzIK5hPas encore d'évaluation
- Guide Etudes Techniques Des Defenses MaritimesDocument23 pagesGuide Etudes Techniques Des Defenses MaritimesFares Chammam100% (1)
- AssDocument2 pagesAssAzzedine GarahPas encore d'évaluation
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation
- L' Ingénieur et le développement durableD'EverandL' Ingénieur et le développement durableÉvaluation : 2 sur 5 étoiles2/5 (1)
- Évolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azoteD'EverandÉvolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azotePas encore d'évaluation
- Examen Hydraulique Maritime 2020-2021Document3 pagesExamen Hydraulique Maritime 2020-2021Ayoub Tofix67% (3)
- Turbulence 2020-2021 Sujet N°3Document4 pagesTurbulence 2020-2021 Sujet N°3Ayoub TofixPas encore d'évaluation
- 4 1810637 BENTOFAYL Ayoub: #Code-E Nom Prénom Descreptif Du Projet Type D'ouvrage Capacité de Stockage (m3)Document3 pages4 1810637 BENTOFAYL Ayoub: #Code-E Nom Prénom Descreptif Du Projet Type D'ouvrage Capacité de Stockage (m3)Ayoub TofixPas encore d'évaluation
- 3 - Laminage Des CruesDocument12 pages3 - Laminage Des CruesAyoub Tofix100% (1)
- Feuille de Réponse Controle EMI 2Document2 pagesFeuille de Réponse Controle EMI 2Ayoub TofixPas encore d'évaluation
- Chapitre 4 - Dessalement Eau de Mer OI 20 21Document21 pagesChapitre 4 - Dessalement Eau de Mer OI 20 21Ayoub TofixPas encore d'évaluation
- Chap 2 Procédés de DessalementDocument25 pagesChap 2 Procédés de DessalementAyoub TofixPas encore d'évaluation
- Mini Projet Trafic Urbain Groupe 1Document15 pagesMini Projet Trafic Urbain Groupe 1Ayoub TofixPas encore d'évaluation
- Bassin de RétentionDocument15 pagesBassin de RétentionAyoub TofixPas encore d'évaluation
- Rapport Projet Regularisation Et LaminageDocument27 pagesRapport Projet Regularisation Et LaminageAyoub TofixPas encore d'évaluation
- Tisser Des Liens L Entrevue Caroline DoyonDocument23 pagesTisser Des Liens L Entrevue Caroline DoyonKaroline TruchonPas encore d'évaluation
- Manga FrenchDocument23 pagesManga FrenchLaurent Ferry SiégniPas encore d'évaluation
- Bus M 2016 Brahimi Aghilas PDFDocument207 pagesBus M 2016 Brahimi Aghilas PDFhana tiPas encore d'évaluation
- Clinique SSR Bellefontaine NancyDocument2 pagesClinique SSR Bellefontaine NancySonia GonzalezPas encore d'évaluation
- Phèdre (PDFDrive)Document383 pagesPhèdre (PDFDrive)Ange Miguel0% (1)
- ST T46-P46Document12 pagesST T46-P46mohamed0167Pas encore d'évaluation
- Chapitre 1-Cours de Java PDFDocument22 pagesChapitre 1-Cours de Java PDFmrcutPas encore d'évaluation
- Item 334 - Angor Chronique StableDocument5 pagesItem 334 - Angor Chronique Stableabdele.adelPas encore d'évaluation
- Transistors BipolairesDocument17 pagesTransistors Bipolaireskouassinehemie320Pas encore d'évaluation
- Controle 1 4sc 2023 2024vfDocument3 pagesControle 1 4sc 2023 2024vfytube.channel49Pas encore d'évaluation
- IEC 614-1.imgDocument7 pagesIEC 614-1.imgSiberianVzlaPas encore d'évaluation
- Trévisan-Le Songe VerdDocument5 pagesTrévisan-Le Songe VerdbertosamPas encore d'évaluation
- L3 PRO HydrogeologieDocument36 pagesL3 PRO HydrogeologieSidiki CamaraPas encore d'évaluation
- Freies Handbuch CH Retail FRDocument36 pagesFreies Handbuch CH Retail FRHyacinthe DahoPas encore d'évaluation
- 2.fungi Cours JPM 2006 JpegDocument39 pages2.fungi Cours JPM 2006 JpegNoor GhPas encore d'évaluation
- Info - Express N°04Document2 pagesInfo - Express N°04Walid Ben AmirPas encore d'évaluation
- Devoir PatrimoineDocument2 pagesDevoir PatrimoineWalid MostefaouiPas encore d'évaluation
- Correction Ro Efb Mai 2014Document5 pagesCorrection Ro Efb Mai 2014Mohamed AssadPas encore d'évaluation
- ST4617272Document3 pagesST4617272Guer RiePas encore d'évaluation
- Autocad 2016 Tips and Tricks FR PDFDocument23 pagesAutocad 2016 Tips and Tricks FR PDFHamza ChelabiPas encore d'évaluation
- TP2 Filtrage NumeriqueDocument25 pagesTP2 Filtrage NumeriqueG POWERPas encore d'évaluation
- Exemple Clous Et EpinglesDocument1 pageExemple Clous Et EpinglescahowenPas encore d'évaluation
- Cours D'audit Comptable Et FinancierDocument249 pagesCours D'audit Comptable Et FinancierBouzari Soufiane100% (1)
- Francais Texte RestaurantDocument1 pageFrancais Texte RestaurantJosefina García OsorioPas encore d'évaluation
- Essentage ArdoiseDocument4 pagesEssentage ArdoisechristianperesPas encore d'évaluation
- Schenck Intecont Plus Weighfeeder Manual PDFDocument87 pagesSchenck Intecont Plus Weighfeeder Manual PDFANDREY79% (19)
- 01 - Introduction Aux Reseaux de NeuronesDocument61 pages01 - Introduction Aux Reseaux de NeuronesDOTSYS DevPas encore d'évaluation
- Mise À La Terre D'une Installation Électrique, Norme NF C 15-100Document8 pagesMise À La Terre D'une Installation Électrique, Norme NF C 15-100Med Habib AitPas encore d'évaluation
- 2843612136Document8 pages2843612136Hanina mamiPas encore d'évaluation
- TP SoufflerieDocument6 pagesTP SoufflerieAchraf BouhayekPas encore d'évaluation