Vous aimerez peut-être aussi
- Les Transferts massifs d'eau: Outils de développement ou instruments de pouvoir ?D'EverandLes Transferts massifs d'eau: Outils de développement ou instruments de pouvoir ?Pas encore d'évaluation
- Chap 3 Cours OM Les Ouvrges D'accostages Et D'amaragesDocument5 pagesChap 3 Cours OM Les Ouvrges D'accostages Et D'amaragesRAHMA ABDELLIPas encore d'évaluation
- Cours PONT - PARTIE 1Document72 pagesCours PONT - PARTIE 1Fatime Ezzahrae BennaniPas encore d'évaluation
- Chap 2 Cours OM Les Digues de ProtectionDocument6 pagesChap 2 Cours OM Les Digues de ProtectionRAHMA ABDELLIPas encore d'évaluation
- Travaux MaritimesDocument13 pagesTravaux MaritimesCheraiti AbdelmoumenePas encore d'évaluation
- Petits Barrages Et Digues Deversantes Jan.95Document81 pagesPetits Barrages Et Digues Deversantes Jan.95Wambié NagaroPas encore d'évaluation
- Chap 3 (Conception D'un Port) (Version Corrigée)Document179 pagesChap 3 (Conception D'un Port) (Version Corrigée)khaoulaPas encore d'évaluation
- Ouvrages de Protection Des PortsDocument55 pagesOuvrages de Protection Des PortsCOUPEL audranPas encore d'évaluation
- Infra Maritimeschapitre I GénéralitésDocument6 pagesInfra Maritimeschapitre I GénéralitésJasmin AgriPas encore d'évaluation
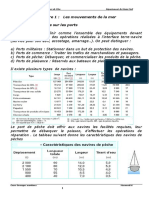
- Chap 1 Cours OM Les Mouvements de La MerDocument5 pagesChap 1 Cours OM Les Mouvements de La MerRAHMA ABDELLIPas encore d'évaluation
- Ouvrages MaritimesDocument63 pagesOuvrages MaritimesYouness CharihPas encore d'évaluation
- Chapitre 6 PART 1 - Dimensionnement Des Ouvrages Portuaires (05-2021)Document48 pagesChapitre 6 PART 1 - Dimensionnement Des Ouvrages Portuaires (05-2021)fatPas encore d'évaluation
- M2GPC 2021 IntroductionDocument232 pagesM2GPC 2021 IntroductionHajar Abunaeem50% (2)
- Action de La Houle Sur Un ObstacleDocument70 pagesAction de La Houle Sur Un ObstaclejbdevaulxPas encore d'évaluation
- Syllabus GCIDocument51 pagesSyllabus GCIlando de chancePas encore d'évaluation
- 03 Aix Presentation Travaux Olivier Soulat GPMM Cle27eeefDocument49 pages03 Aix Presentation Travaux Olivier Soulat GPMM Cle27eeefphilou6259Pas encore d'évaluation
- Projet PortDocument30 pagesProjet PortRachid DaoudiPas encore d'évaluation
- Travaux Maritimes-ConvertiDocument9 pagesTravaux Maritimes-ConvertiAmira RaniaPas encore d'évaluation
- Barrage Hydraulique 4e 1Document11 pagesBarrage Hydraulique 4e 1Soloniaina Nomenjanahary NIRIANTSOA ANDRIANATOANDROPas encore d'évaluation
- Cours Ouvrages Portuaires Partie 2Document91 pagesCours Ouvrages Portuaires Partie 2Illiana FannangPas encore d'évaluation
- TINTO Abdel AzizlDocument156 pagesTINTO Abdel AzizlDiadiePas encore d'évaluation
- Ouvrage Defense LittorauxDocument64 pagesOuvrage Defense LittorauxmahdouchfkiPas encore d'évaluation
- Digues PDFDocument55 pagesDigues PDFHanane In'Hid100% (1)
- Technique Des Petits Barrages Chap 4 5 6 7Document190 pagesTechnique Des Petits Barrages Chap 4 5 6 7Ahmed Mediouni100% (2)
- Recherche Bibliographique Sur Les Barrages en RemblaisDocument5 pagesRecherche Bibliographique Sur Les Barrages en RemblaisOTHMANE MOBSSIT ELIDRISSIPas encore d'évaluation
- Chapitre 3 La Houle RéelleDocument46 pagesChapitre 3 La Houle RéellebouraadaPas encore d'évaluation
- RapphouleVfinale 16-04-2014Document33 pagesRapphouleVfinale 16-04-2014Deanna BarrettPas encore d'évaluation
- MémoireDocument66 pagesMémoireĂm ĘlPas encore d'évaluation
- DPDPM Formation Marituime Sept 2010 Part 2 Conception PortuaireDocument102 pagesDPDPM Formation Marituime Sept 2010 Part 2 Conception Portuaireipman99Pas encore d'évaluation
- Chapitre 4 Dimensionnement Des PontsDocument65 pagesChapitre 4 Dimensionnement Des PontsOndo OsnoPas encore d'évaluation
- 1 - Choix Du Mode de Creusement - Barrage KharroubDocument99 pages1 - Choix Du Mode de Creusement - Barrage KharroubAsmaa Kasmi100% (2)
- Rapport Finale 2Document90 pagesRapport Finale 2Yasser El adnaniPas encore d'évaluation
- DiguesDocument55 pagesDiguesmahdouchfkiPas encore d'évaluation
- Les DragueDocument29 pagesLes DragueOmar Sayoumit100% (1)
- Cours Le Barrages 2011-Mode-De-compatibilitéDocument96 pagesCours Le Barrages 2011-Mode-De-compatibilitéaminPas encore d'évaluation
- Generalite Sur Les Ouvrages MaritimesDocument15 pagesGeneralite Sur Les Ouvrages Maritimesseddzrh100% (1)
- ANBT AONI Etude Faisabilite Barrage Trois Rivieres W.mascaraDocument74 pagesANBT AONI Etude Faisabilite Barrage Trois Rivieres W.mascaraHocinePas encore d'évaluation
- CCTPDocument84 pagesCCTPFares Hayder100% (1)
- Fonctions D'un QuaiDocument11 pagesFonctions D'un QuaiOUMAYMA MAJDOUBI100% (1)
- GuideDragageFFPP Lite2005Document83 pagesGuideDragageFFPP Lite2005SCRIBDCOM9Pas encore d'évaluation
- Fondations CyclopéennesDocument2 pagesFondations CyclopéennesStanley MAYETTEPas encore d'évaluation
- Modélisation Hydraulique Bidimensionnelle À L'aide Du Logiciel MIKE 21Document175 pagesModélisation Hydraulique Bidimensionnelle À L'aide Du Logiciel MIKE 21Anas HamdiPas encore d'évaluation
- Excellent Aménagement Port Marchandise OranDocument103 pagesExcellent Aménagement Port Marchandise OranrymouachPas encore d'évaluation
- BarrageDocument17 pagesBarrageJoël KoffiPas encore d'évaluation
- HoulesDocument60 pagesHoulesAbdesslam GuennouniPas encore d'évaluation
- Questions Et Commentaires Sur La Construction D'un Tramway À QuébecDocument49 pagesQuestions Et Commentaires Sur La Construction D'un Tramway À QuébecRadio-CanadaPas encore d'évaluation
- Controle de Compactage PDFDocument16 pagesControle de Compactage PDFYounes YounesPas encore d'évaluation
- TP 3-Quai Sur PieuxDocument11 pagesTP 3-Quai Sur PieuxharirPas encore d'évaluation
- Principes Generaux Du Dimensionnement Des Ouvrages Eurocodes en 1990 Et en 1991Document45 pagesPrincipes Generaux Du Dimensionnement Des Ouvrages Eurocodes en 1990 Et en 1991gusyl44Pas encore d'évaluation
- Etude PortDocument36 pagesEtude PortAnonymous mzn5BiPas encore d'évaluation
- Chap 4 Barrage VoutesDocument95 pagesChap 4 Barrage VoutesAli Ben MansourPas encore d'évaluation
- L' Ingénieur et le développement durableD'EverandL' Ingénieur et le développement durableÉvaluation : 2 sur 5 étoiles2/5 (1)
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation
- Évolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azoteD'EverandÉvolution des procédés - la séparation de l'air atmosphérique en ses éléments, l'oxygène et l'azotePas encore d'évaluation
- Études sur la géologie, la paléontologie et l'ancienneté de l'homme: Le département de Lot-et-GaronneD'EverandÉtudes sur la géologie, la paléontologie et l'ancienneté de l'homme: Le département de Lot-et-GaronnePas encore d'évaluation
- Examen OM 2021Document1 pageExamen OM 2021Fatma Ben BelgacemPas encore d'évaluation
- Série TDDocument4 pagesSérie TDLaid Zaidoun0% (1)
- Esquise Pont Rail: Présenté ParDocument34 pagesEsquise Pont Rail: Présenté ParBOUZIANE MessaoudPas encore d'évaluation
- Chapitre 0 PDFDocument4 pagesChapitre 0 PDFSAMedPas encore d'évaluation
- T.stamboul Polycopie1Document47 pagesT.stamboul Polycopie1zima72100% (1)
- exam-ENIS-2018 - CopieDocument2 pagesexam-ENIS-2018 - CopieRAHMA ABDELLIPas encore d'évaluation
- 5.2.1 FiT1 Mesure de Debit A Surface LibreDocument12 pages5.2.1 FiT1 Mesure de Debit A Surface LibreRAHMA ABDELLIPas encore d'évaluation
- Topo CoursDocument90 pagesTopo CoursḾøķhtàriHƿkPas encore d'évaluation
- Poly Alimentation en Eau Potable Moussa 2002Document123 pagesPoly Alimentation en Eau Potable Moussa 2002zikows1Pas encore d'évaluation
- Compte Rendu TopoDocument6 pagesCompte Rendu TopoRAHMA ABDELLIPas encore d'évaluation
- C Cours Methodes D ImplantationDocument60 pagesC Cours Methodes D ImplantationKhiera TopoPas encore d'évaluation
- exam-ENIS-2018 - CopieDocument2 pagesexam-ENIS-2018 - CopieRAHMA ABDELLIPas encore d'évaluation
- Introduction A La RDMDocument7 pagesIntroduction A La RDMKamel Ibrahim100% (1)
- exam-ENIS-2018 - CopieDocument2 pagesexam-ENIS-2018 - CopieRAHMA ABDELLIPas encore d'évaluation
- Calcul TensorielDocument2 pagesCalcul TensorielRAHMA ABDELLIPas encore d'évaluation
- Exam AN ENIS 2019Document2 pagesExam AN ENIS 2019RAHMA ABDELLIPas encore d'évaluation
- MMMMMMMM MuDocument8 pagesMMMMMMMM Mu12345 liPas encore d'évaluation
- Station TotalesDocument9 pagesStation TotalesMolnarAndreiPas encore d'évaluation
- BLPC 207 21-32Document12 pagesBLPC 207 21-32RAHMA ABDELLIPas encore d'évaluation
- Exam Comps 2018iitDocument5 pagesExam Comps 2018iitRAHMA ABDELLIPas encore d'évaluation
- Exam Comps 2018iitDocument5 pagesExam Comps 2018iitRAHMA ABDELLIPas encore d'évaluation
- Examen Charpente MetalliqueDocument6 pagesExamen Charpente MetalliqueRAHMA ABDELLIPas encore d'évaluation
- Cours Tecnologie Des Bétons 2020Document35 pagesCours Tecnologie Des Bétons 2020RAHMA ABDELLIPas encore d'évaluation
- Exercice-3 (Corrigé de La Question 2) - 2) Déplacements de Cet État de Déformations Avec Les Conditions Sur Les Constantes A, B Et CDocument1 pageExercice-3 (Corrigé de La Question 2) - 2) Déplacements de Cet État de Déformations Avec Les Conditions Sur Les Constantes A, B Et CRAHMA ABDELLIPas encore d'évaluation
- TD Comp BétonDocument9 pagesTD Comp BétonRAHMA ABDELLIPas encore d'évaluation
- Analyse Granulométrique SGGDocument1 pageAnalyse Granulométrique SGGRAHMA ABDELLIPas encore d'évaluation
- Construction BatimentDocument6 pagesConstruction Batimentsarre mamoudou100% (1)
- Chap 2Document43 pagesChap 2RAHMA ABDELLIPas encore d'évaluation
- CHP 1Document59 pagesCHP 1alaaPas encore d'évaluation
- Détermination Du PCNDocument7 pagesDétermination Du PCNRAHMA ABDELLIPas encore d'évaluation
- TD Comp BétonDocument9 pagesTD Comp BétonRAHMA ABDELLIPas encore d'évaluation
- Chap 3 Les Ouvrages Accostages Et Amarrages - QuaiDocument23 pagesChap 3 Les Ouvrages Accostages Et Amarrages - QuaiRAHMA ABDELLI100% (1)
- La Conception Des Ouvrages Courants en Béton Armé Et en Béton PrécontraintDocument62 pagesLa Conception Des Ouvrages Courants en Béton Armé Et en Béton PrécontraintRAHMA ABDELLIPas encore d'évaluation
- La Demarche DinvestigationDocument18 pagesLa Demarche DinvestigationMohamed Ait AliPas encore d'évaluation
- Fiche 2013 1 5 20les 20equipements 20de 20contruction 20et 20reparation 20navaleDocument8 pagesFiche 2013 1 5 20les 20equipements 20de 20contruction 20et 20reparation 20navaleattiori fabricePas encore d'évaluation
- Guide de Consommation de Carburant 2020Document43 pagesGuide de Consommation de Carburant 2020anaclet mbiyaPas encore d'évaluation
- La Manutention PortuaireDocument16 pagesLa Manutention PortuaireFieni Diarra100% (1)
- Tracé RoutierDocument10 pagesTracé RoutierTeo TegPas encore d'évaluation
- Boite de Vitesses RobotiseeDocument8 pagesBoite de Vitesses RobotiseenicoPas encore d'évaluation
- 2016 BMW R 1200 Gs Adventure 65357Document224 pages2016 BMW R 1200 Gs Adventure 65357rsdPas encore d'évaluation
- Train Des Souris H Yamashita 2Document1 pageTrain Des Souris H Yamashita 2Roxane GagePas encore d'évaluation
- Feuille Cotation Bilan Des Schémas MoteursDocument2 pagesFeuille Cotation Bilan Des Schémas MoteursSERVELPas encore d'évaluation
- Le Transport Et Lõapprovisionnement Inter-Marchžs Dans Les Villes de LõafriqueDocument25 pagesLe Transport Et Lõapprovisionnement Inter-Marchžs Dans Les Villes de LõafriqueRoselande DiackPas encore d'évaluation
- 6eme Materiaux Et Objets Techniques p1 8Document8 pages6eme Materiaux Et Objets Techniques p1 8Pierre AubertPas encore d'évaluation
- Oncf-Voyages-Abdelkhalek MnaouerDocument1 pageOncf-Voyages-Abdelkhalek MnaouerABDELKHALEK MNAOUERPas encore d'évaluation
- Mercedes-AMG GLE 63 S 4MATIC+ MPKZ6ZAEDocument8 pagesMercedes-AMG GLE 63 S 4MATIC+ MPKZ6ZAEHeritier NealPas encore d'évaluation
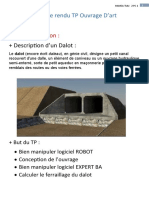
- Compte Rendu TP Ouvrage DDocument18 pagesCompte Rendu TP Ouvrage DAymen BaccouchePas encore d'évaluation
- A - t3p CorrigeDocument3 pagesA - t3p Corrigesidou sid100% (1)
- Planing Control FFDocument3 pagesPlaning Control FFKrouma RedhouanePas encore d'évaluation
- Manuel D'exploitationDocument942 pagesManuel D'exploitationgoxmadPas encore d'évaluation
- Procédure Qualite Tirage Cable Sur Caniveaux. Ver 00 - CopieDocument8 pagesProcédure Qualite Tirage Cable Sur Caniveaux. Ver 00 - CopieabdellahPas encore d'évaluation
- Mentions Specifiques A La Version PDF: Cette Version PDF Est Réservée À L'acheteur Du Document Identifié Par Le WatermarkDocument227 pagesMentions Specifiques A La Version PDF: Cette Version PDF Est Réservée À L'acheteur Du Document Identifié Par Le WatermarkMejdi ksontiniPas encore d'évaluation
- Le Sentiment D'insécurité Vécu Par Les Femmes Dans L'espace Public À GenèveDocument21 pagesLe Sentiment D'insécurité Vécu Par Les Femmes Dans L'espace Public À Genèveclaudia-faustoPas encore d'évaluation
- Entretien Preventif Reseau Routier F ChaignonDocument49 pagesEntretien Preventif Reseau Routier F ChaignonSarahPas encore d'évaluation
- New DocumentDocument7 pagesNew DocumentNelly BushiriPas encore d'évaluation
- XHISTOVTEDocument37 pagesXHISTOVTEAdil EssmaaliPas encore d'évaluation
- Guide EscaliersDocument12 pagesGuide EscaliersBET T.I.DPas encore d'évaluation
- Imis Policy Paper Auto 2022Document34 pagesImis Policy Paper Auto 2022Souad HassPas encore d'évaluation
- HistoireDocument4 pagesHistoirecentre appelPas encore d'évaluation
- Kit Filtres TRDocument9 pagesKit Filtres TRMartinezPas encore d'évaluation
- Instructions D'Installation: Liste Des PiecesDocument2 pagesInstructions D'Installation: Liste Des PiecesNicoPas encore d'évaluation
- Moteurs Le Guide Du Hors BordDocument12 pagesMoteurs Le Guide Du Hors BordFabrice DanotPas encore d'évaluation
- D1S01H22 - SolutionsDocument7 pagesD1S01H22 - SolutionsCatvy TranPas encore d'évaluation