Vous aimerez peut-être aussi
- Serie4 5Document51 pagesSerie4 5Zaki Zakaria100% (10)
- TD1 TSDocument4 pagesTD1 TSyassine choukriPas encore d'évaluation
- Les Efforts Internes Dans Les StructuresDocument40 pagesLes Efforts Internes Dans Les StructuresRamy100% (1)
- Tts 1Document22 pagesTts 1sowPas encore d'évaluation
- TD 2 Rayonnement Des AntennesDocument6 pagesTD 2 Rayonnement Des AntennessabersaberPas encore d'évaluation
- Exercices Corriges MatricesDocument3 pagesExercices Corriges Matriceslionelmessi10Pas encore d'évaluation
- TD5 FM VFDocument2 pagesTD5 FM VFAnas FarhaouiPas encore d'évaluation
- Exam 2012Document2 pagesExam 2012Yazid MohamdiPas encore d'évaluation
- Poly TFD PDFDocument30 pagesPoly TFD PDFSade RinconPas encore d'évaluation
- TraitementImages TD 1-2 CORRIGEDocument16 pagesTraitementImages TD 1-2 CORRIGEOubajja HamidPas encore d'évaluation
- Tp5 Generation Produit Convolution Signaux Discrets PDFDocument9 pagesTp5 Generation Produit Convolution Signaux Discrets PDFmrd9991Pas encore d'évaluation
- ImInfo Corr TD1Document4 pagesImInfo Corr TD1Oussema SaadouliPas encore d'évaluation
- TD RES 4.1Document7 pagesTD RES 4.1Ayoub Moufid100% (1)
- Corrélation Et Convolution Des SignauxDocument8 pagesCorrélation Et Convolution Des SignauxMadjid Ait MatenPas encore d'évaluation
- TD4 - Analyse de FourierDocument3 pagesTD4 - Analyse de FourierBor Han100% (1)
- TD Chapitre 3 Traitement Min PDFDocument5 pagesTD Chapitre 3 Traitement Min PDFFrancolain AndríPas encore d'évaluation
- Chapitre 2 - 2023Document19 pagesChapitre 2 - 2023MOUSSA Mamane RabiouPas encore d'évaluation
- Traitement Du SignalDocument144 pagesTraitement Du SignalMichael Innocent ImiPas encore d'évaluation
- Chapitre Processus AleatoireDocument19 pagesChapitre Processus AleatoireChi KouPas encore d'évaluation
- Série 1 TD Traitement de SiganlDocument2 pagesSérie 1 TD Traitement de SiganlFatima Zohra ESSAKHAIRYPas encore d'évaluation
- 6 - Corrigé Emd2 2008-2009 Traitement Du SignalDocument3 pages6 - Corrigé Emd2 2008-2009 Traitement Du SignalBouhafs AbdelkaderPas encore d'évaluation
- TP 2Document16 pagesTP 2Firas KachroudiPas encore d'évaluation
- Corrigé Série1 TD Sup 2019 2020Document15 pagesCorrigé Série1 TD Sup 2019 2020Let's Go TlmPas encore d'évaluation
- Quelques Applications de La Distribution de Dirac en PhysiqueDocument11 pagesQuelques Applications de La Distribution de Dirac en PhysiqueGuillo Andry0% (1)
- TD7 - Traitement de Singal - 2018 - 2019Document9 pagesTD7 - Traitement de Singal - 2018 - 2019nait ahmed hasnaPas encore d'évaluation
- TPn°2Document5 pagesTPn°2Sonia Boufala100% (1)
- Partiels2a PDFDocument314 pagesPartiels2a PDFchfakhtPas encore d'évaluation
- 03 - Chap III - Syst確e de FiltrageDocument58 pages03 - Chap III - Syst確e de FiltrageCissPas encore d'évaluation
- TP de Traitement Du Signal. Séance 1: Premiers Contacts Avec MatlabDocument8 pagesTP de Traitement Du Signal. Séance 1: Premiers Contacts Avec MatlabOmar OmarPas encore d'évaluation
- Chap3 PDFDocument38 pagesChap3 PDFoussamaPas encore d'évaluation
- DS1 SolDocument4 pagesDS1 SolCrash Fine You100% (1)
- Cours 9Document36 pagesCours 9chouirebfPas encore d'évaluation
- Correction TNS TD3 Signaux AleatoiresDocument1 pageCorrection TNS TD3 Signaux AleatoiresAmira Dhorbani100% (1)
- Théorie Du SignalDocument78 pagesThéorie Du SignalAboubacryPas encore d'évaluation
- Telecom Controle 2018Document1 pageTelecom Controle 2018SafaePas encore d'évaluation
- Correction TD 2223Document21 pagesCorrection TD 2223Babacar Mbaye AagPas encore d'évaluation
- Traitement-Du-Signal-Cours-14 Echantillonnage PDFDocument178 pagesTraitement-Du-Signal-Cours-14 Echantillonnage PDFsid ali saidjPas encore d'évaluation
- M1 IM BM711 CorrigéDocument4 pagesM1 IM BM711 CorrigéguendilPas encore d'évaluation
- Laplace 2008 Serie 5Document4 pagesLaplace 2008 Serie 5FAKEHI EL KHAILIPas encore d'évaluation
- Problème A: Intégrale de DirichletDocument8 pagesProblème A: Intégrale de DirichletIsmail AdmichPas encore d'évaluation
- Propagation Des Ondes Électromagnétiques en Radioélectricité Et Guidage Des Hyperfréquences (Micro-Ondes)Document48 pagesPropagation Des Ondes Électromagnétiques en Radioélectricité Et Guidage Des Hyperfréquences (Micro-Ondes)Emna KanzariPas encore d'évaluation
- Synthèse Représentation Des Matrices Et Vecteurs en PythonDocument3 pagesSynthèse Représentation Des Matrices Et Vecteurs en PythonSimo360Pas encore d'évaluation
- Adnen-Cours TNSDocument99 pagesAdnen-Cours TNSNadhem Rusty Abidi100% (2)
- MatlabDocument12 pagesMatlabA.HoussainPas encore d'évaluation
- 3 - Cours - Modulation AngulaireDocument18 pages3 - Cours - Modulation Angulairelisa lisaPas encore d'évaluation
- TD4 Corrige Dass GCV3 Ipsas-1 PDFDocument4 pagesTD4 Corrige Dass GCV3 Ipsas-1 PDFRami ZekriPas encore d'évaluation
- Traitement SignalDocument2 pagesTraitement SignalFaouzi TlemcenPas encore d'évaluation
- GEL-16120 - Modulation NumeriqueDocument30 pagesGEL-16120 - Modulation NumeriqueIbrahimFaroukSolarPas encore d'évaluation
- Chapitre 1Document12 pagesChapitre 1Houda SenoussiPas encore d'évaluation
- 1-Cavités RésonnantesDocument30 pages1-Cavités RésonnantesMajd RasimPas encore d'évaluation
- Série 6 Supplémentaire - EXERCICES - SUR - SYNTHESE DES FILTRES RIIDocument5 pagesSérie 6 Supplémentaire - EXERCICES - SUR - SYNTHESE DES FILTRES RIIMe Re100% (1)
- Traitement Du Signal Examen 05Document5 pagesTraitement Du Signal Examen 05Miss AmericanaPas encore d'évaluation
- Corrigé E3bDocument33 pagesCorrigé E3bOussama SlimaniPas encore d'évaluation
- Travaux PratiquesDocument19 pagesTravaux Pratiquesfouad LPRTPas encore d'évaluation
- TP TNS 1en PDFDocument6 pagesTP TNS 1en PDFExoco-LMD AlgériePas encore d'évaluation
- Exos TVDocument10 pagesExos TVAlyna ElaPas encore d'évaluation
- TD Cna 2 2020Document2 pagesTD Cna 2 2020LE BARONPas encore d'évaluation
- TD Communication Analogique 18Document2 pagesTD Communication Analogique 18superzakiPas encore d'évaluation
- PEG-intégrales Impropres Et Intégrales Dépendant D'un ParamètreDocument19 pagesPEG-intégrales Impropres Et Intégrales Dépendant D'un ParamètreTECH NEWSPas encore d'évaluation
- Laplace 2008Document39 pagesLaplace 2008Hassna BounouaderPas encore d'évaluation
- Asservissement Analogique: Chapitre 2Document18 pagesAsservissement Analogique: Chapitre 2Hind LabiriPas encore d'évaluation
- Analyse Et Filtrage Des Signaux Num - Riques - Dec - 2015 - RectDocument80 pagesAnalyse Et Filtrage Des Signaux Num - Riques - Dec - 2015 - RectmaryPas encore d'évaluation
- Segmentation Des Images Medicales PDFDocument39 pagesSegmentation Des Images Medicales PDFmaryPas encore d'évaluation
- TP Traitement Images Medicales PDFDocument4 pagesTP Traitement Images Medicales PDFmaryPas encore d'évaluation
- TP Traitement Images Medicales PDFDocument4 pagesTP Traitement Images Medicales PDFmaryPas encore d'évaluation
- Doct EBM MessadiDocument203 pagesDoct EBM MessadimaryPas encore d'évaluation
- 20prim EdTCDocument9 pages20prim EdTCBrandon Kab'sPas encore d'évaluation
- TP 1 - Compte Rendu (Champ Electrique D'un Condensateurs) - 1Document14 pagesTP 1 - Compte Rendu (Champ Electrique D'un Condensateurs) - 1Ahmed ENNAIR100% (1)
- TP-RLC 0910Document2 pagesTP-RLC 0910anas habachiPas encore d'évaluation
- Mémoire Iap UBDDocument14 pagesMémoire Iap UBDSamirDerguinePas encore d'évaluation
- Cours 4 TDDocument5 pagesCours 4 TDSalem AmarouchiPas encore d'évaluation
- Ch3 Le Quadripole Sur MicroDocument9 pagesCh3 Le Quadripole Sur MicroManuel ArzolaPas encore d'évaluation
- ST Sba - Physique1 CoursDocument61 pagesST Sba - Physique1 Coursمشري محمد العيدPas encore d'évaluation
- TP N°2 AutomatiqueDocument10 pagesTP N°2 AutomatiqueIMEN BENALIPas encore d'évaluation
- RelationsDocument6 pagesRelationsAbdelilah El GmairiPas encore d'évaluation
- Sujet 3Document5 pagesSujet 3Jihed HorchaniPas encore d'évaluation
- Série Des ExercicesDocument4 pagesSérie Des Exercicesoirsnam1Pas encore d'évaluation
- Chap 03 - RhéologieDocument8 pagesChap 03 - RhéologieYacinePas encore d'évaluation
- 33 AsservissementDocument23 pages33 AsservissementIssam BoujnanePas encore d'évaluation
- CNED CE1 - Découverte Du Monde - Sequence-09Document6 pagesCNED CE1 - Découverte Du Monde - Sequence-09gigiPas encore d'évaluation
- Climatiseur-Bosch-5000i FR TNDocument6 pagesClimatiseur-Bosch-5000i FR TNMohamed NasfiPas encore d'évaluation
- Exercices Amplificateur de TransconductanceDocument8 pagesExercices Amplificateur de TransconductanceBouchra BourassPas encore d'évaluation
- 2.0 FR-FR 2023-03 PL.3102Document32 pages2.0 FR-FR 2023-03 PL.3102Hallier GPas encore d'évaluation
- Cours SM - Master - 2021-2022 PDFDocument37 pagesCours SM - Master - 2021-2022 PDFHasna DaoudiPas encore d'évaluation
- Les Constituants de L'atome: Le NoyauDocument1 pageLes Constituants de L'atome: Le NoyauNawres MsakniPas encore d'évaluation
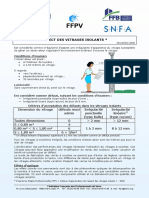
- Criteres Appreciation Aspect Vitrages Isolants 20Document1 pageCriteres Appreciation Aspect Vitrages Isolants 20Vincenzo De GregorioPas encore d'évaluation
- ABG Chap3 Reseau Modelisation 24Document20 pagesABG Chap3 Reseau Modelisation 24bennhilamaha1Pas encore d'évaluation
- Sujet Examen D'equilibre Entre Phases 2023-2024Document2 pagesSujet Examen D'equilibre Entre Phases 2023-2024elongoPas encore d'évaluation
- Correction Exercice Lunette Astronomique Et Littérature Victor HugoDocument3 pagesCorrection Exercice Lunette Astronomique Et Littérature Victor HugoThildemaPas encore d'évaluation
- Correction Serie4Document2 pagesCorrection Serie4mirouPas encore d'évaluation
- 13.1.048 en 13286 41 1Document12 pages13.1.048 en 13286 41 1Zaki KonfePas encore d'évaluation
- Chapitre 4fondationsDocument17 pagesChapitre 4fondationssam1gc geniec21Pas encore d'évaluation
- TP Les Essais Mecaniques M1 G SurfaceDocument8 pagesTP Les Essais Mecaniques M1 G SurfaceRaouf ZitouniPas encore d'évaluation
- Onduleurs Chap6Document16 pagesOnduleurs Chap6Er-Rhahmani MedPas encore d'évaluation