Vous aimerez peut-être aussi
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Course ELectronique de Puissance FRDocument168 pagesCourse ELectronique de Puissance FRAhmad JammalPas encore d'évaluation
- 2electronique de PuissanceDocument240 pages2electronique de PuissanceYassine Zahar100% (1)
- Chapitre2 - Conversion DC - DCDocument65 pagesChapitre2 - Conversion DC - DCÀLì BkPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- ch32 Convertisseur ElectromecaniqueDocument6 pagesch32 Convertisseur ElectromecaniqueMohamed LarbiPas encore d'évaluation
- TD5 - Electronique de PuissanceDocument3 pagesTD5 - Electronique de PuissanceMOHAMED ACHLIOUIPas encore d'évaluation
- Chapitre 2 PR MouachiDocument103 pagesChapitre 2 PR Mouachirida fargaliPas encore d'évaluation
- Schéma Va Et Vient, Schema Électrique Interactif D'un Va Et VientDocument5 pagesSchéma Va Et Vient, Schema Électrique Interactif D'un Va Et VientMichel BanzePas encore d'évaluation
- VIII - Onduleur Monophasé - AutonomeDocument20 pagesVIII - Onduleur Monophasé - AutonomeHerman Chardonnel BATOUNGADIOPas encore d'évaluation
- Cours Électronique de PuissanceDocument52 pagesCours Électronique de PuissanceAyoub TioualePas encore d'évaluation
- Onduleur 2012Document16 pagesOnduleur 2012arbaoui113880Pas encore d'évaluation
- Synthese Sur Les Moteurs Electriques (VF) Nyebe Ndongo Jeanne MichelleDocument34 pagesSynthese Sur Les Moteurs Electriques (VF) Nyebe Ndongo Jeanne MichelleMichelle NyebePas encore d'évaluation
- Transformateur TriphaséDocument8 pagesTransformateur TriphaséHamdiPas encore d'évaluation
- Lois Generales Electricite - Doc Lois Generales ElectriciteDocument0 pageLois Generales Electricite - Doc Lois Generales ElectriciteHilda OrtizPas encore d'évaluation
- Electronique de PuissanceDocument31 pagesElectronique de PuissanceBOUHNIN JawadPas encore d'évaluation
- Chapitre 1Document10 pagesChapitre 1The AlgerianmanPas encore d'évaluation
- Cours Semi ConducteursDocument75 pagesCours Semi ConducteursFatou NdiayePas encore d'évaluation
- 26 TP Electronique de Puissance Et CapteursDocument2 pages26 TP Electronique de Puissance Et CapteursAhmad EL Zaatari100% (1)
- Transformateurs Monophasés Et Triphasés CoursDocument19 pagesTransformateurs Monophasés Et Triphasés CoursemimohemadiaPas encore d'évaluation
- 3 MillmanDocument2 pages3 MillmanchhinPas encore d'évaluation
- MAchines AsynchroneDocument51 pagesMAchines AsynchroneMoussa SEYEPas encore d'évaluation
- Cours Electronique Puissance Ch1Document20 pagesCours Electronique Puissance Ch1arnaud29100% (1)
- Composants Electronique 2019Document8 pagesComposants Electronique 2019Lon MendyPas encore d'évaluation
- Chapitre 4 Transistors Bipolaire SuiteDocument63 pagesChapitre 4 Transistors Bipolaire SuiteferkoulPas encore d'évaluation
- Notion de Base en ÉlectroniqueDocument47 pagesNotion de Base en ÉlectroniqueWalid JaffaliPas encore d'évaluation
- Electricite Generale AbDocument88 pagesElectricite Generale AbKandjiPas encore d'évaluation
- Chapitre 2 Transformateur Triphasé - Partie1Document14 pagesChapitre 2 Transformateur Triphasé - Partie1Imen SaidiPas encore d'évaluation
- Les Alimentations LinéairesDocument6 pagesLes Alimentations Linéairessouheil khalifa100% (1)
- Cours Electronique de PuissanceDocument77 pagesCours Electronique de PuissanceDomingo FotsoPas encore d'évaluation
- 1 HacheursDocument14 pages1 HacheursZakaria Djahara100% (1)
- GradateurDocument12 pagesGradateurFouad ElhajjiPas encore d'évaluation
- Electronique de PuissanceDocument4 pagesElectronique de PuissanceNOURDINE EZZALMADIPas encore d'évaluation
- Chapitre1 Conversion AC DCDocument72 pagesChapitre1 Conversion AC DCÀLì BkPas encore d'évaluation
- TP1 Électrotechnique: Le Courant Alternatif MonophaséDocument17 pagesTP1 Électrotechnique: Le Courant Alternatif MonophaséBouzayen NourPas encore d'évaluation
- SerieN°5 - Hacheur-16-Octobre 2019Document2 pagesSerieN°5 - Hacheur-16-Octobre 2019OUSSAMA BOUZEGAOUPas encore d'évaluation
- Puissance DeformanteDocument17 pagesPuissance DeformantetliarPas encore d'évaluation
- Machines Electriques Tournantes - Document ElèvesDocument73 pagesMachines Electriques Tournantes - Document ElèvesBerLin Dz100% (1)
- Nombres Complexes en ÉléctricitéDocument96 pagesNombres Complexes en ÉléctricitéAbdeldjalil djalilPas encore d'évaluation
- ELEC248 - Aide ElectrotechniqueDocument149 pagesELEC248 - Aide Electrotechniquesrami12Pas encore d'évaluation
- CH 4 Redressement Commandé ÉlèDocument13 pagesCH 4 Redressement Commandé Élècharletb toubiaPas encore d'évaluation
- Electronique de Puissance L2 S2Document74 pagesElectronique de Puissance L2 S2Sofiane BePas encore d'évaluation
- (CStat) (CO) Convertisseurs StatiquesDocument12 pages(CStat) (CO) Convertisseurs StatiquesAsm MaPas encore d'évaluation
- Elec P 5Document41 pagesElec P 5Anonymous 78iAn6100% (2)
- Chapitre 1 - Etude Des Systèmes ÉlectriquesDocument46 pagesChapitre 1 - Etude Des Systèmes Électriquesأشرف عبودPas encore d'évaluation
- Elc610 Electronique de Commande 2020 2021 ValidéDocument6 pagesElc610 Electronique de Commande 2020 2021 ValidéOssama SariaPas encore d'évaluation
- TP PontMixteDocument9 pagesTP PontMixteMootez MoussaPas encore d'évaluation
- Electronique de Puissance Elec032Document49 pagesElectronique de Puissance Elec032Sidahmed LarbaouiPas encore d'évaluation
- Epreuve-SMP3 Elec 2004 PDFDocument2 pagesEpreuve-SMP3 Elec 2004 PDFTaha AinouchPas encore d'évaluation
- Chap - 1 INTERRUPTEURS SEMI-CONDUCTEURS DE PUISSANCE (Mode de Compatibilité)Document16 pagesChap - 1 INTERRUPTEURS SEMI-CONDUCTEURS DE PUISSANCE (Mode de Compatibilité)Wassim GtmoPas encore d'évaluation
- Montage Des Diodes À Gaz Et À Vide: Normes Et Schémas ElectriquesDocument3 pagesMontage Des Diodes À Gaz Et À Vide: Normes Et Schémas ElectriquesRegulationL3 USTHBPas encore d'évaluation
- Electronique de Puissance09Document60 pagesElectronique de Puissance09الواثق باللهPas encore d'évaluation
- L'Électricité - Découvreurs et Inventeurs: Tome IVD'EverandL'Électricité - Découvreurs et Inventeurs: Tome IVÉvaluation : 3 sur 5 étoiles3/5 (2)
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Cours de Mecanique Analytique PDFDocument99 pagesCours de Mecanique Analytique PDFAliOuchar100% (1)
- InjecteurDocument3 pagesInjecteurfeka niniPas encore d'évaluation
- Devoir de Synthèse N°1 - Sciences Physiques - 2ème Informatique (2020-2021) MR Fathi JellitiDocument3 pagesDevoir de Synthèse N°1 - Sciences Physiques - 2ème Informatique (2020-2021) MR Fathi JellitiTarek MezghanniPas encore d'évaluation
- EMPLOI DU TEMPS Licence Semestre 1 2022-2023-Avec TDDocument8 pagesEMPLOI DU TEMPS Licence Semestre 1 2022-2023-Avec TDsi salem tassaditPas encore d'évaluation
- Estimation Chap 1 EsbDocument10 pagesEstimation Chap 1 EsbHanane DerraaPas encore d'évaluation
- Résistance Des Matériaux Appliquée Aux Organes de Machines: Serge LAROZEDocument62 pagesRésistance Des Matériaux Appliquée Aux Organes de Machines: Serge LAROZEYoucef Br'sPas encore d'évaluation
- ProduitsAVI June09Document73 pagesProduitsAVI June09guy_fauquembergue3827Pas encore d'évaluation
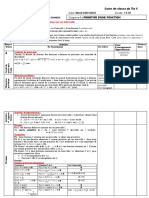
- 2bac Continuité D'une FonctionDocument26 pages2bac Continuité D'une FonctionLEILA LOURDIPas encore d'évaluation
- DM OptiqueDocument3 pagesDM OptiqueFatima BelallamPas encore d'évaluation
- Correction EMD1 MMCIETH07Document1 pageCorrection EMD1 MMCIETH07Fares JcbPas encore d'évaluation
- Chapitre 2 GRAFCET PDFDocument18 pagesChapitre 2 GRAFCET PDFCherdouh RabahPas encore d'évaluation
- Un Bref Cours de BalistiqueDocument9 pagesUn Bref Cours de Balistiqueludo37690% (1)
- LZMDocument46 pagesLZMAUGOSTINPas encore d'évaluation
- Caractristique de Transistor MosDocument7 pagesCaractristique de Transistor Moschebli abdelghafourPas encore d'évaluation
- La 2379Document3 pagesLa 2379Walid Ben AmirPas encore d'évaluation
- These Audrey NEAU 2009 PDFDocument223 pagesThese Audrey NEAU 2009 PDFEmira ZrelliPas encore d'évaluation
- Giovanni Levi Les Usages de La BiographiDocument13 pagesGiovanni Levi Les Usages de La BiographicristianvasquezsaavedraPas encore d'évaluation
- TD2 Machines 2023Document4 pagesTD2 Machines 2023Aymane ElkharoussiPas encore d'évaluation
- EvaporationDocument3 pagesEvaporationibtissam mikhyarPas encore d'évaluation
- Dyn FL CDocument32 pagesDyn FL CChourouk MeskiniPas encore d'évaluation
- Devoir de Controle +Liaisons+MécaniquesN2 1AS 2021Document4 pagesDevoir de Controle +Liaisons+MécaniquesN2 1AS 2021Razan KhPas encore d'évaluation
- Abrege Dhistoire Des MathsDocument7 pagesAbrege Dhistoire Des MathsRamzi MehamdiPas encore d'évaluation
- Primitive Lecon1Document3 pagesPrimitive Lecon1FOPA GILDASPas encore d'évaluation
- Geomatica Flyer FRENCHDocument4 pagesGeomatica Flyer FRENCHHassane AmadouPas encore d'évaluation
- Cours Statistiques DCAMOLTDocument16 pagesCours Statistiques DCAMOLTElasriPas encore d'évaluation
- Acoustique Technique 64Document65 pagesAcoustique Technique 64totorino38Pas encore d'évaluation
- Fiche Vibrations Et Ondes M1Document3 pagesFiche Vibrations Et Ondes M1Yassine RékardPas encore d'évaluation
- Chapitre 2Document16 pagesChapitre 2Hamrouni100% (1)
- Cours Electromagnetisme DjelouahDocument94 pagesCours Electromagnetisme DjelouahSy Mohammed Mnaouer100% (1)
- Feuille 5: Transform Ees de Laplace, Fonctions Caract Eristiques, TH Eor' Emes LimitesDocument2 pagesFeuille 5: Transform Ees de Laplace, Fonctions Caract Eristiques, TH Eor' Emes Limitesazizd15Pas encore d'évaluation