Vous aimerez peut-être aussi
- Apsim 18 DynamiqueDocument4 pagesApsim 18 DynamiqueKarima HamdanPas encore d'évaluation
- Corrige 1Document7 pagesCorrige 1M YacinePas encore d'évaluation
- TD Flexion Groupe ADocument2 pagesTD Flexion Groupe Aerzrzretgertfertge100% (1)
- RDM PDFDocument2 pagesRDM PDFkjh100% (1)
- Cvb1 01 CorrigeDocument8 pagesCvb1 01 CorrigeAbdelaliElFaizPas encore d'évaluation
- RDM EleveDocument19 pagesRDM Eleveruben meye meye N'koumePas encore d'évaluation
- Epreuve MMCDocument2 pagesEpreuve MMCmohamed habibe100% (1)
- Ctions Mecaniques: Exercice 1: Solide Soumis A Deux GlisseursDocument20 pagesCtions Mecaniques: Exercice 1: Solide Soumis A Deux GlisseursM-zlle MalakPas encore d'évaluation
- Cours PHYSIQUE Tle-F1-2023Document117 pagesCours PHYSIQUE Tle-F1-2023koffi DOUNEGBLOE100% (1)
- Corrigé Physique C 2008Document7 pagesCorrigé Physique C 2008mardil2aPas encore d'évaluation
- Corrigé TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument9 pagesCorrigé TD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- TD Correction Torseur Cin Dyn PFD TecDocument22 pagesTD Correction Torseur Cin Dyn PFD TecSd instruPas encore d'évaluation
- 03 Notion de Moment TDDocument3 pages03 Notion de Moment TDN'ganmaPas encore d'évaluation
- (Edm) (TD) Chaise D EscalierDocument2 pages(Edm) (TD) Chaise D EscalierJunior KamdemPas encore d'évaluation
- ExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesDocument77 pagesExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesTàHa SamihPas encore d'évaluation
- Élève L'amplificateur OperationnelDocument3 pagesÉlève L'amplificateur OperationnelFélix KouassiPas encore d'évaluation
- Mimoir Final YaaichDocument102 pagesMimoir Final YaaichikramPas encore d'évaluation
- Devoir RégulationDocument1 pageDevoir RégulationAshraf TrescaPas encore d'évaluation
- (AnaHSLCI) (TD) Bras de Robot A Muscles Artificiels PDFDocument8 pages(AnaHSLCI) (TD) Bras de Robot A Muscles Artificiels PDFkamalPas encore d'évaluation
- TD N°05 Statique CorrectionDocument9 pagesTD N°05 Statique CorrectionennajiPas encore d'évaluation
- TD 08Document4 pagesTD 08Abdou HamaouiPas encore d'évaluation
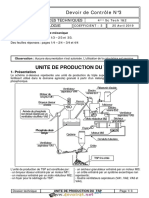
- Devoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenDocument7 pagesDevoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenYasmine SolenePas encore d'évaluation
- الإمتحان الوطني الموحد للبكالوريا الدورة العادية 2012 مادة علوم المهندس شعبة العلوم الرياضية بDocument19 pagesالإمتحان الوطني الموحد للبكالوريا الدورة العادية 2012 مادة علوم المهندس شعبة العلوم الرياضية بAli AmaraPas encore d'évaluation
- td1 Actions Mecaniques Locales Et GlobalesDocument10 pagestd1 Actions Mecaniques Locales Et GlobalesDokatchenin CoulibalyPas encore d'évaluation
- TD1 - CorrectionDocument19 pagesTD1 - Correctionfrançois lutorPas encore d'évaluation
- DS2 SiiDocument8 pagesDS2 SiiAHMED ghribiPas encore d'évaluation
- Exercices Corriges 5Document5 pagesExercices Corriges 5AliBenMessaoud100% (1)
- CCP Tsi Si 2016eDocument30 pagesCCP Tsi Si 2016ekamalPas encore d'évaluation
- 06.3 - Pont de WienDocument3 pages06.3 - Pont de WienAchraf MoutaharPas encore d'évaluation
- TD 6 Hyperstatisme - Degré D'hyperstaticitéDocument3 pagesTD 6 Hyperstatisme - Degré D'hyperstaticitéahmedguerinPas encore d'évaluation
- Semestre 2 DS 4 2013-2014 Melangeur de Peinture - OdtDocument9 pagesSemestre 2 DS 4 2013-2014 Melangeur de Peinture - OdtAbdelali YacoubiPas encore d'évaluation
- EEIGM 1 Ère Année. Discipline Mécanique. Résistance Des Matériaux. TD 1 - Exercices D Application Sur La Notion de Torseur.Document11 pagesEEIGM 1 Ère Année. Discipline Mécanique. Résistance Des Matériaux. TD 1 - Exercices D Application Sur La Notion de Torseur.ABDESSAMAD EZZALMADI0% (1)
- Porte de GarageDocument2 pagesPorte de Garageveronique jodkun0% (1)
- Relation ADCDocument3 pagesRelation ADCAZERTY darkPas encore d'évaluation
- CN Fao IiDocument112 pagesCN Fao IiPouhe CyrillePas encore d'évaluation
- Prob 21402Document8 pagesProb 21402Ayoüb Sou UadPas encore d'évaluation
- MHDDocument6 pagesMHDAbdessemed FouziPas encore d'évaluation
- 16 Statique Degré Dhyperstatisme Exemples de CalculDocument1 page16 Statique Degré Dhyperstatisme Exemples de CalculDialseny Dalaba100% (1)
- Si MP 2022Document16 pagesSi MP 2022NguyenPas encore d'évaluation
- 3porte Automatisee PDFDocument41 pages3porte Automatisee PDFJalil AkaabounePas encore d'évaluation
- TDDocument6 pagesTDYassir Ez-znafryPas encore d'évaluation
- Unknown PDFDocument5 pagesUnknown PDFAyman BenamerPas encore d'évaluation
- CNC Si MP 2009 CG PDFDocument14 pagesCNC Si MP 2009 CG PDFJassir AmgroudPas encore d'évaluation
- Cahier SI SEM I + Media 2Document121 pagesCahier SI SEM I + Media 2Michri SaleckPas encore d'évaluation
- TD 17 - Liaisons Équivalentes PDFDocument5 pagesTD 17 - Liaisons Équivalentes PDFAbdelhakPas encore d'évaluation
- (Cin) (TD) Manege Pieuvre-2Document2 pages(Cin) (TD) Manege Pieuvre-2Omaima BelgacemPas encore d'évaluation
- CoursTheorie Des MecanismesDocument18 pagesCoursTheorie Des Mecanismeshayet debbichPas encore d'évaluation
- (Mod) (TD) Modelisation Des MecanismesDocument25 pages(Mod) (TD) Modelisation Des MecanismesNarjiss ShimiPas encore d'évaluation
- E4 Bts CPRP 2019 Partie 5 CorrigeDocument19 pagesE4 Bts CPRP 2019 Partie 5 CorrigeYou MajPas encore d'évaluation
- DL2 EnonDocument3 pagesDL2 EnonLucas huzvdcbPas encore d'évaluation
- DS4 SujetDocument8 pagesDS4 SujetPierre BeckPas encore d'évaluation
- CI4 TD33-Centrifugeuse PDFDocument1 pageCI4 TD33-Centrifugeuse PDFOthmane TouilPas encore d'évaluation
- Chap2 LIAISONS MECANIQUESDocument13 pagesChap2 LIAISONS MECANIQUESAdams SamassiPas encore d'évaluation
- CSP ScriptPiezoelectricsDocument10 pagesCSP ScriptPiezoelectricsmeryem abidaPas encore d'évaluation
- Klubprepa Extrait 4747Document2 pagesKlubprepa Extrait 4747Asmaa KasmiPas encore d'évaluation
- Corrigé 2 DevoirDocument4 pagesCorrigé 2 DevoirCoul AdamoPas encore d'évaluation
- 03 Cin 04 ChainesFermees Applications 01 CorrDocument7 pages03 Cin 04 ChainesFermees Applications 01 CorrMouhcine Ben MoussaPas encore d'évaluation
- 03 Cin 04 ChainesFermees Applications 01 CorrDocument7 pages03 Cin 04 ChainesFermees Applications 01 Corrlaalai faicelPas encore d'évaluation
- RDM TreillisDocument6 pagesRDM TreillisGérard Claude EssomePas encore d'évaluation
- Chapitre 7 Les Couts LogistiquesDocument2 pagesChapitre 7 Les Couts LogistiquesMohamedPas encore d'évaluation
- Druanti The Arch-Revenant: Liste de CadeauxDocument1 pageDruanti The Arch-Revenant: Liste de CadeauxAntoine ForitesPas encore d'évaluation
- TEST Connaissance PLSQLDocument3 pagesTEST Connaissance PLSQLFORMATION ORADISTPas encore d'évaluation
- Cas Pratique SARL BASQUAIR ÉnoncéDocument1 pageCas Pratique SARL BASQUAIR ÉnoncéPierre DelarueaPas encore d'évaluation
- Résumé ImpedanceDocument7 pagesRésumé Impedancehelmi copy centerPas encore d'évaluation
- Modele Acte D'engagementDocument2 pagesModele Acte D'engagementzak.sb22Pas encore d'évaluation
- VALEO - Ignition Spare Parts 2007 PDFDocument636 pagesVALEO - Ignition Spare Parts 2007 PDFgeorge_scala100% (1)
- 2020 Sustainable Agriculture Standard - Farm Requirements - Rainforest Alliance FRDocument91 pages2020 Sustainable Agriculture Standard - Farm Requirements - Rainforest Alliance FRkouame gerard kouamePas encore d'évaluation
- Manuel de Vol C 150 PDFDocument43 pagesManuel de Vol C 150 PDFjmlezcanoPas encore d'évaluation
- Alcatel CMDDocument11 pagesAlcatel CMDmobio jeanPas encore d'évaluation
- Maymana ContenuDocument161 pagesMaymana ContenuMohammed ZizahPas encore d'évaluation
- Gestion Des RDV - Cahier de ChargeDocument4 pagesGestion Des RDV - Cahier de ChargeAdalou NIAONEPas encore d'évaluation
- L'entreprise Les Relations Entre Propriétaires Dirigeants Et Employés.Document4 pagesL'entreprise Les Relations Entre Propriétaires Dirigeants Et Employés.Francesca GermainPas encore d'évaluation
- Exercices Mtcna - Module 1 - V1Document9 pagesExercices Mtcna - Module 1 - V1Garry Moore100% (1)
- Cours Ingenierie SystemeDocument67 pagesCours Ingenierie Systemeoussama elhjoujiPas encore d'évaluation
- 70 Idées de Business en 2020Document5 pages70 Idées de Business en 2020rojo razanadrakotoPas encore d'évaluation
- Cours de Fiscalitã© Internationale 2022 2023 PDFDocument164 pagesCours de Fiscalitã© Internationale 2022 2023 PDFSirine JabesPas encore d'évaluation
- VOTRE ORDINATEUR 03 1984-01-02 (Acme)Document92 pagesVOTRE ORDINATEUR 03 1984-01-02 (Acme)Taranis35Pas encore d'évaluation
- Entre TienDocument16 pagesEntre TienKawtarSoloPas encore d'évaluation
- Rapport 1Document13 pagesRapport 1Safwen BoufaidPas encore d'évaluation
- Ci Etec NigerDocument44 pagesCi Etec NigerSayabou MahamadouPas encore d'évaluation
- Plaquette Ouvrages Ralentissement Crues VilaineDocument6 pagesPlaquette Ouvrages Ralentissement Crues Vilainemetalika_1981Pas encore d'évaluation
- Formation Methode HaccpDocument111 pagesFormation Methode HaccpTIEBE SERGESPas encore d'évaluation
- Organigramme Universite Bordeaux MontaigneDocument12 pagesOrganigramme Universite Bordeaux MontaigneingridguerreroocampoPas encore d'évaluation
- Document 575912Document142 pagesDocument 575912Abass DialloPas encore d'évaluation
- Le Contrat de Transport International 2022Document10 pagesLe Contrat de Transport International 2022Amina ChiahiPas encore d'évaluation
- MAH4444Document139 pagesMAH4444بلقاسم جلاليPas encore d'évaluation
- MS311 MS391Document94 pagesMS311 MS391Bruno DenollePas encore d'évaluation
- Cours Droit GOZZIDocument32 pagesCours Droit GOZZINicoleta BusuiocPas encore d'évaluation
- Examen Ro 21Document1 pageExamen Ro 21صنع في المنزل Made at homePas encore d'évaluation
- Harmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020D'EverandHarmonisation Energétique des Lieux: Habitat et haut-lieux sacrés 2020Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieD'EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieÉvaluation : 5 sur 5 étoiles5/5 (2)
- La vie des abeilles: Prix Nobel de littératureD'EverandLa vie des abeilles: Prix Nobel de littératureÉvaluation : 4 sur 5 étoiles4/5 (41)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Transformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitD'EverandTransformez votre vie: Utilisez le pouvoir créateur qui est en vous pour construire votre vie à l'image de ce que vous voulez qu'elle soitÉvaluation : 4 sur 5 étoiles4/5 (14)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Approvisionnement et traitement de l’eau: Les Grands Articles d'UniversalisD'EverandApprovisionnement et traitement de l’eau: Les Grands Articles d'UniversalisPas encore d'évaluation
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeD'EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumePas encore d'évaluation
- Enseigner une Langue Etrangère Par l’Apprentissage HybrideD'EverandEnseigner une Langue Etrangère Par l’Apprentissage HybridePas encore d'évaluation
- Géobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainD'EverandGéobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- 500 secrets pour avoir un potager merveilleuxD'Everand500 secrets pour avoir un potager merveilleuxÉvaluation : 2 sur 5 étoiles2/5 (1)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- Histoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsD'EverandHistoire de la psychologie scientifique: De la naissance de la psychologie à la neuropsychologie et aux champs d'application les plus actuelsPas encore d'évaluation
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Géologie de l'Amérique: Les Grands Articles d'UniversalisD'EverandGéologie de l'Amérique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Jus de Fruits et de Légumes Crus: 57 recettes faciles et un Guide Pratique Complet pour améliorer votre alimentation .: Santé, Vitalité et Minceur, avec ... ET DURABLEMENTD'EverandJus de Fruits et de Légumes Crus: 57 recettes faciles et un Guide Pratique Complet pour améliorer votre alimentation .: Santé, Vitalité et Minceur, avec ... ET DURABLEMENTPas encore d'évaluation