Vous aimerez peut-être aussi
- Corrigé Afs2016Document6 pagesCorrigé Afs2016Ibrahim Êl BæzPas encore d'évaluation
- TD N°04 Transmission Par Frottement CorrectionDocument15 pagesTD N°04 Transmission Par Frottement CorrectionennajiPas encore d'évaluation
- TD N°04 Transmission Par Frottement CorrectionDocument15 pagesTD N°04 Transmission Par Frottement CorrectionennajiPas encore d'évaluation
- 11 - Cinematique Liaisons EquivalentesDocument19 pages11 - Cinematique Liaisons Equivalentessaded05Pas encore d'évaluation
- BOYER Gabrielle La Responsabilité Des Gestionnaires de Prts Maritimes À L'égard Des Propriétaires Et Exploitants de Navires - 2014Document104 pagesBOYER Gabrielle La Responsabilité Des Gestionnaires de Prts Maritimes À L'égard Des Propriétaires Et Exploitants de Navires - 2014Eisn 2020Pas encore d'évaluation
- Suspension MotoDocument12 pagesSuspension Motohenri100% (1)
- Contrat Affrètement DIA 2018Document18 pagesContrat Affrètement DIA 2018OUMAYMA BEN MAACHOUPas encore d'évaluation
- TD 25 - PFS Résolution Analytique + AM Dans Les Liaisons ParfaitesDocument6 pagesTD 25 - PFS Résolution Analytique + AM Dans Les Liaisons Parfaitesbhs channel100% (1)
- Corrigé TD 10 - Comportement Cinématique Des SystèmesDocument5 pagesCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- TD - Déterminer Les Efforts Aux Effecteurs de Structures Ouvertes À L'équilibreDocument9 pagesTD - Déterminer Les Efforts Aux Effecteurs de Structures Ouvertes À L'équilibreennajiPas encore d'évaluation
- TD 08Document4 pagesTD 08Abdou HamaouiPas encore d'évaluation
- Transfert ThermiqueDocument152 pagesTransfert ThermiqueHamza_Leconstant_44284% (31)
- PN - A Feu Et A SangDocument258 pagesPN - A Feu Et A SangYOANN GANDONPas encore d'évaluation
- Le Metier de TransitaireDocument20 pagesLe Metier de TransitaireABDOU GOUDIABYPas encore d'évaluation
- Chapitre 2 TorseursDocument13 pagesChapitre 2 TorseursHediFatnassiPas encore d'évaluation
- TD 12 - Comportement Cinématique Des SystèmesDocument10 pagesTD 12 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- Liaisons Equival TDDocument18 pagesLiaisons Equival TDAyou HamPas encore d'évaluation
- Sec Minesponts 2004 Sic PSIDocument12 pagesSec Minesponts 2004 Sic PSIAlexandre BourrieauPas encore d'évaluation
- TD 09 - Cinématique Analytique - Dérivation VectorielleDocument3 pagesTD 09 - Cinématique Analytique - Dérivation VectoriellemoulyPas encore d'évaluation
- FinalementDocument51 pagesFinalementMazighi SaadPas encore d'évaluation
- Sujet Mai-2018 - Poste de Perçage Automatique PDFDocument19 pagesSujet Mai-2018 - Poste de Perçage Automatique PDFdiassaPas encore d'évaluation
- TDDocument6 pagesTDYassir Ez-znafryPas encore d'évaluation
- 208 Prehenseur CorrigeDocument4 pages208 Prehenseur CorrigeAhmed TalsiPas encore d'évaluation
- Klubprepa Extrait 4747Document2 pagesKlubprepa Extrait 4747Asmaa KasmiPas encore d'évaluation
- Apsim 18 DynamiqueDocument4 pagesApsim 18 DynamiqueKarima HamdanPas encore d'évaluation
- Centre D Usinage 5 Axes CorrigeDocument2 pagesCentre D Usinage 5 Axes CorrigeLAILA IDRISSIPas encore d'évaluation
- Porte de GarageDocument2 pagesPorte de Garageveronique jodkun0% (1)
- TD de SI - MécaniqueDocument3 pagesTD de SI - MécaniqueArthur TigreatPas encore d'évaluation
- Sciences Industrielles de L IngénieurDocument65 pagesSciences Industrielles de L IngénieurKOUADIO PATRICEPas encore d'évaluation
- امتحان علوم المهندسDocument12 pagesامتحان علوم المهندسMoradLeglilPas encore d'évaluation
- CNC Si MP 2009 CG PDFDocument14 pagesCNC Si MP 2009 CG PDFJassir AmgroudPas encore d'évaluation
- DS1 MP - 13 - 11 - 21 (Sujet)Document7 pagesDS1 MP - 13 - 11 - 21 (Sujet)LASSOUED WAJDIPas encore d'évaluation
- TP Scie SauteuseDocument5 pagesTP Scie SauteuseremivsnPas encore d'évaluation
- Fiche Chaines de SolidesDocument7 pagesFiche Chaines de Solidesayoub elPas encore d'évaluation
- Roule MentsDocument63 pagesRoule MentsYassine ElbiadPas encore d'évaluation
- DL2 EnonDocument3 pagesDL2 EnonLucas huzvdcbPas encore d'évaluation
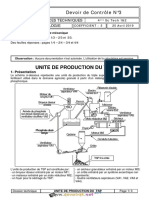
- Devoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenDocument7 pagesDevoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenYasmine SolenePas encore d'évaluation
- TD 4 CorrDocument5 pagesTD 4 CorrMeng HeangPas encore d'évaluation
- TD 1Document2 pagesTD 1hello 128Pas encore d'évaluation
- DS4 SujetDocument8 pagesDS4 SujetPierre BeckPas encore d'évaluation
- 2-Corrigé TD Hyperstisme-Mat-ReacteurDocument2 pages2-Corrigé TD Hyperstisme-Mat-ReacteurManel AyebPas encore d'évaluation
- Cours Cinematique GraphDocument11 pagesCours Cinematique GraphEtienne BouronPas encore d'évaluation
- Cahier SI SEM I + Media 2Document121 pagesCahier SI SEM I + Media 2Michri SaleckPas encore d'évaluation
- Préparation Concours20 CinématiqueDocument7 pagesPréparation Concours20 CinématiqueAdamPas encore d'évaluation
- Numeration EleecDocument21 pagesNumeration EleecSalif NanaPas encore d'évaluation
- Cours Composition de Mouvement de Vitesse LvesDocument5 pagesCours Composition de Mouvement de Vitesse LvesziedttPas encore d'évaluation
- 32 Loi Entrée Sortie Géométrique D 1Document6 pages32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- 32 Fermeture Geo ExercicesDocument4 pages32 Fermeture Geo Exerciceslaalai faicelPas encore d'évaluation
- Exo Cinematique PerforatriceDocument1 pageExo Cinematique PerforatriceFilaliAbderrahimPas encore d'évaluation
- TD 2 Liaisons Schéma CinématiqueDocument6 pagesTD 2 Liaisons Schéma CinématiqueNadhir MehellouPas encore d'évaluation
- ChainesFermees Applications 01Document4 pagesChainesFermees Applications 01Tigma AarousPas encore d'évaluation
- TD CIN Graphique - Pompe A PetroleDocument3 pagesTD CIN Graphique - Pompe A Petrolesallsmart100% (1)
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiPas encore d'évaluation
- TD Combinatoire TsiDocument5 pagesTD Combinatoire TsikamalPas encore d'évaluation
- CORRIGEDocument16 pagesCORRIGEBenAmmareImedPas encore d'évaluation
- DM Quille PendulaireDocument5 pagesDM Quille PendulaireFilouPas encore d'évaluation
- DS2 SiiDocument8 pagesDS2 SiiAHMED ghribiPas encore d'évaluation
- Corrigé ARCS 2020Document8 pagesCorrigé ARCS 2020Mouhcine Ben MoussaPas encore d'évaluation
- DP Elec 13 - 14Document4 pagesDP Elec 13 - 14Elafif HamdiPas encore d'évaluation
- Variateur TDDocument4 pagesVariateur TDmecaniquesti100% (1)
- Cours Modelisation Des Liaisons PRDocument4 pagesCours Modelisation Des Liaisons PRAgriIT •Pas encore d'évaluation
- S623.2 Comportement Des MecanismesDocument3 pagesS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- 01 Essui Glace de BusDocument2 pages01 Essui Glace de Busaazz38Pas encore d'évaluation
- Grue Portuaire - CorrectionDocument13 pagesGrue Portuaire - CorrectionKOUADIO PATRICEPas encore d'évaluation
- ExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesDocument77 pagesExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesTàHa SamihPas encore d'évaluation
- Théorie Mecanismes Etude de Cas-MaxpidDocument25 pagesThéorie Mecanismes Etude de Cas-MaxpidMerv Bouda100% (1)
- 1-TP N°1-Etude Cinématique Du Système Essuie-GlaceDocument6 pages1-TP N°1-Etude Cinématique Du Système Essuie-Glacelynda jerbiaPas encore d'évaluation
- Biot Savart Application PDFDocument2 pagesBiot Savart Application PDFL'ardu Sory SidibePas encore d'évaluation
- CHMP Demi Anneau PDFDocument1 pageCHMP Demi Anneau PDFKhalid ZegPas encore d'évaluation
- TD N°01 Action Mécanique CorrectionDocument7 pagesTD N°01 Action Mécanique CorrectionennajiPas encore d'évaluation
- TD N°04 Transmission Par FrottementDocument8 pagesTD N°04 Transmission Par FrottementennajiPas encore d'évaluation
- 01 AssemblagesVissesDocument12 pages01 AssemblagesVissesennajiPas encore d'évaluation
- Assemblages PDFDocument12 pagesAssemblages PDFAchraf MoutaharPas encore d'évaluation
- Energetique Poly PDFDocument7 pagesEnergetique Poly PDFNirina ArimananaPas encore d'évaluation
- Assemblages PDFDocument12 pagesAssemblages PDFAchraf MoutaharPas encore d'évaluation
- 01 AssemblagesVissesDocument12 pages01 AssemblagesVissesennajiPas encore d'évaluation
- Energetique Poly PDFDocument7 pagesEnergetique Poly PDFNirina ArimananaPas encore d'évaluation
- Visitez - CoursExercices - Com - Cours - Compo Vitesses - Eleve - 2011.pdf - 923Document3 pagesVisitez - CoursExercices - Com - Cours - Compo Vitesses - Eleve - 2011.pdf - 923ennajiPas encore d'évaluation
- Thermo - Cours - ch1 - Gaz ParfaitDocument22 pagesThermo - Cours - ch1 - Gaz ParfaitennajiPas encore d'évaluation
- Projet Monbb Web v5 2022Document8 pagesProjet Monbb Web v5 2022Dany CarvalhoPas encore d'évaluation
- Calendrier 2023 EspritacademiqueDocument1 pageCalendrier 2023 EspritacademiqueQuentin JeromePas encore d'évaluation
- Metal Adventure - Vaisseau - ScoutDocument1 pageMetal Adventure - Vaisseau - ScoutLeonarius NomadaPas encore d'évaluation
- Convention Internationale de 1966 Sur Les Lignes de Charge 0.747.305.411Document78 pagesConvention Internationale de 1966 Sur Les Lignes de Charge 0.747.305.411Zaki CitizenPas encore d'évaluation
- Jadwal Proyek P5 KewirausahaanDocument5 pagesJadwal Proyek P5 Kewirausahaanmila RahmawatiPas encore d'évaluation
- ConditionsDocument18 pagesConditionsaityacoubtPas encore d'évaluation
- LDP Hg4 Chap13Document8 pagesLDP Hg4 Chap13Eliane RESIDENTPas encore d'évaluation
- AIM N°28 549-MTM-MFB-10 Visa de Documents Et Accès Administratifs - 0Document6 pagesAIM N°28 549-MTM-MFB-10 Visa de Documents Et Accès Administratifs - 0DIR DEPEPas encore d'évaluation
- AssuranceDocument2 pagesAssuranceJijiPas encore d'évaluation
- Système de BalisageDocument5 pagesSystème de BalisageChristiano MamyPas encore d'évaluation
- Ec Catan Marins RegleDocument10 pagesEc Catan Marins RegleSimon AttiasPas encore d'évaluation
- Le Port de CasablancaDocument9 pagesLe Port de CasablancaLilyPas encore d'évaluation
- Alger Et Ses Environs Piesse Louis bpt6k5701379dDocument224 pagesAlger Et Ses Environs Piesse Louis bpt6k5701379dSamiHamelPas encore d'évaluation
- Calendrier Scolaire 2023 2024 Avec Semaine Paire ImpaireDocument1 pageCalendrier Scolaire 2023 2024 Avec Semaine Paire ImpairePhilippe BorrelPas encore d'évaluation
- HMS VICTORY French Edition - Pack - 04 - FR - Etpaes 031 - A - 040Document41 pagesHMS VICTORY French Edition - Pack - 04 - FR - Etpaes 031 - A - 040Alain GayetPas encore d'évaluation
- Il Était Une Fois La Senne + PhotosDocument43 pagesIl Était Une Fois La Senne + PhotosggafiinPas encore d'évaluation
- Division 160 Gestion - Pour - La - SecuriteDocument32 pagesDivision 160 Gestion - Pour - La - SecuriteFlorimond NcPas encore d'évaluation
- Boarding PassDocument1 pageBoarding PassZineb MoukhlissePas encore d'évaluation
- Mémoire 2021 LAMFICHEKH SALMA Version FrançaisDocument79 pagesMémoire 2021 LAMFICHEKH SALMA Version FrançaisAbdelaziz HamouchePas encore d'évaluation
- Calendrier 2023 de La Petite LumièreDocument2 pagesCalendrier 2023 de La Petite LumièreLa Petite LumièrePas encore d'évaluation
- Calendrier Scolaire 2024 2025Document1 pageCalendrier Scolaire 2024 2025France3 Auvergne-Rhône-AlpesPas encore d'évaluation
- EXPO 02 Definition de Conteneur (1) AOUADI IMENDocument3 pagesEXPO 02 Definition de Conteneur (1) AOUADI IMENRIHANI MohamedPas encore d'évaluation
- Fiche Projet Scra & JL TugDocument4 pagesFiche Projet Scra & JL TugelgardaaPas encore d'évaluation
- Le Barbaresque - Olivier WeberDocument195 pagesLe Barbaresque - Olivier WeberKamel NabiPas encore d'évaluation
- 10 09 Losange A Quille Fiches CERFS VOLANTSDocument2 pages10 09 Losange A Quille Fiches CERFS VOLANTSArthur RichetPas encore d'évaluation