Vous aimerez peut-être aussi
- Exam MMC Enit 14 15&corrigeDocument6 pagesExam MMC Enit 14 15&corrigeMolka Harbaoui100% (1)
- Chapitre10 Anal Num MerseDocument5 pagesChapitre10 Anal Num Mersesafae akrabPas encore d'évaluation
- Algorithme de Gauss Sans PermutationDocument11 pagesAlgorithme de Gauss Sans Permutationafkir hamzaPas encore d'évaluation
- Devoir 1 CorrigéDocument7 pagesDevoir 1 Corrigésamisamata7Pas encore d'évaluation
- TD3 M MAT321 - CorrectionDocument13 pagesTD3 M MAT321 - CorrectionKayah CheikhPas encore d'évaluation
- Série TD #2Document4 pagesSérie TD #2ZERARKA Mohamed FawziPas encore d'évaluation
- Controle Intermediaire Printemps 2011 Math II Analyse CorrectionDocument4 pagesControle Intermediaire Printemps 2011 Math II Analyse CorrectionWarda JoryPas encore d'évaluation
- Cours 1 Les Lois de NewtonDocument4 pagesCours 1 Les Lois de Newtonzinebben461Pas encore d'évaluation
- Correction TD3Document13 pagesCorrection TD3Emna Kanzari100% (1)
- Solution TD Equations Différentielles PDFDocument4 pagesSolution TD Equations Différentielles PDFJames XgunPas encore d'évaluation
- 4 TD Algebre IV Du 16 03 12Document5 pages4 TD Algebre IV Du 16 03 12titikam4Pas encore d'évaluation
- NF04 - TD - CorrigéeDocument30 pagesNF04 - TD - CorrigéeJohnsonPas encore d'évaluation
- TD 05 Angles Orientes-Trigo 1S1 LfselDocument6 pagesTD 05 Angles Orientes-Trigo 1S1 Lfseliamacteur34Pas encore d'évaluation
- 2CPI Cours LaplaceDocument4 pages2CPI Cours LaplaceANDAHMOUPas encore d'évaluation
- Chapitre7 Anal Num MerseDocument14 pagesChapitre7 Anal Num Mersesafae akrabPas encore d'évaluation
- Chapitre 2 Partie C Les Integrales de SurfacesDocument11 pagesChapitre 2 Partie C Les Integrales de Surfacessamer menPas encore d'évaluation
- Corrigé D'examen de Rattrapage M2 Diagnostic 2022-2023Document3 pagesCorrigé D'examen de Rattrapage M2 Diagnostic 2022-2023Mos TachePas encore d'évaluation
- Série TD #2Document3 pagesSérie TD #2ZERARKA Mohamed FawziPas encore d'évaluation
- Corrige Bac 2020 TsexpDocument4 pagesCorrige Bac 2020 Tsexpbakarytraore7418Pas encore d'évaluation
- PTV PenduleDocument2 pagesPTV Penduleadem bengharsaPas encore d'évaluation
- TD 2 - 2021Document2 pagesTD 2 - 2021hiba gribaPas encore d'évaluation
- 10 Exercices D'Arithmétique Avec Correction: Salut À Toi, Dans Le But D'Améliorer Ton Niveau en Arithmétique J'AiDocument18 pages10 Exercices D'Arithmétique Avec Correction: Salut À Toi, Dans Le But D'Améliorer Ton Niveau en Arithmétique J'AiFlora AkePas encore d'évaluation
- Cours ALE 14Document1 pageCours ALE 14Sedira RafikPas encore d'évaluation
- Solution Devoir 1 2020Document9 pagesSolution Devoir 1 2020Said Jatri sidi100% (1)
- Cours Chap2 Identites - Remarquables CorrDocument2 pagesCours Chap2 Identites - Remarquables Corrsanae.ellahyaniPas encore d'évaluation
- GS741 Corrigé ExamenS01 2023Document4 pagesGS741 Corrigé ExamenS01 2023ouardaafroulPas encore d'évaluation
- Travaux Dirigés Robotique 1 2020Document4 pagesTravaux Dirigés Robotique 1 2020marwa hamdiPas encore d'évaluation
- TD 9Document28 pagesTD 9Ali AmaraPas encore d'évaluation
- Td9 - Solide Tunusie ImportantDocument28 pagesTd9 - Solide Tunusie ImportantDriss Miral Achemlal100% (1)
- Corrigé TD1 TRSF de MVTDocument5 pagesCorrigé TD1 TRSF de MVTأشرف عبودPas encore d'évaluation
- Solutions Des Exercices Du TD1 PDFDocument5 pagesSolutions Des Exercices Du TD1 PDFشراك حسانPas encore d'évaluation
- Devoir D'automatisme / Asservissement D'un RéservoirDocument8 pagesDevoir D'automatisme / Asservissement D'un RéservoirWaldex INELUSPas encore d'évaluation
- $examen Final S1 UM6PDocument5 pages$examen Final S1 UM6PIchrak madromiPas encore d'évaluation
- CNC Si MP 2011Document27 pagesCNC Si MP 2011salma ait aliPas encore d'évaluation
- Chapitre2 Suite Analnum Merse1Document13 pagesChapitre2 Suite Analnum Merse1achraf haikalPas encore d'évaluation
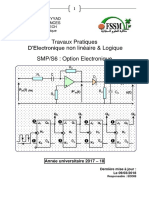
- Poly TP SMP S6 2018Document41 pagesPoly TP SMP S6 2018ANAS ETTANANIAPas encore d'évaluation
- Dombre Notations PDFDocument22 pagesDombre Notations PDFLarbi ElbakkaliPas encore d'évaluation
- Travail Pratique D'Algebre Lineaire N°01 Preparatoire Petrole, Gaz Et Energies RenouvelablesDocument3 pagesTravail Pratique D'Algebre Lineaire N°01 Preparatoire Petrole, Gaz Et Energies RenouvelablesdivinkuniemaPas encore d'évaluation
- Exercices Primitives - IntégralesDocument15 pagesExercices Primitives - Intégralesmohamadoudjire69Pas encore d'évaluation
- Alg 39Document19 pagesAlg 39Smail RCAPas encore d'évaluation
- Corrigé Epreuve Maths 2Document5 pagesCorrigé Epreuve Maths 2Franck TankeuPas encore d'évaluation
- Exam Robotique 03Document2 pagesExam Robotique 03Jaouad ElfathPas encore d'évaluation
- Chapitr 1Document12 pagesChapitr 1Salmi AbdelkaderPas encore d'évaluation
- Sujet Corrige Ratt Maths2 ST 18-19Document4 pagesSujet Corrige Ratt Maths2 ST 18-19Chikhaoui AbdellahPas encore d'évaluation
- Modélisation de L'ensemble Convertisseur Statique Moteur AsynchroneDocument13 pagesModélisation de L'ensemble Convertisseur Statique Moteur Asynchronechersavan1100% (4)
- Trigonometrie Resolution Equation TrigonometriqueDocument18 pagesTrigonometrie Resolution Equation TrigonometriqueLarusanPas encore d'évaluation
- Trigonometrie Resolution Equation Trigonometrique PDFDocument18 pagesTrigonometrie Resolution Equation Trigonometrique PDFTko ToolPas encore d'évaluation
- Chapitre - 4 - Commandabilité Et ObservabilitéDocument4 pagesChapitre - 4 - Commandabilité Et ObservabilitéRaouf GhmPas encore d'évaluation
- Sujet Corrige EF Maths2 ST 18-19Document5 pagesSujet Corrige EF Maths2 ST 18-19Chikhaoui AbdellahPas encore d'évaluation
- TD #03 Espace Des Fonctions DondesDocument5 pagesTD #03 Espace Des Fonctions DondesSabirPas encore d'évaluation
- Les Equatione MCRDocument3 pagesLes Equatione MCRMį MøųPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie Buté - 2ème Technique (2012-2013) MR Ben Med MohamedDocument5 pagesDevoir de Synthèse N°2 - Technologie Buté - 2ème Technique (2012-2013) MR Ben Med MohamedRouaissi RidhaPas encore d'évaluation
- TD 1 Correction - 1Document6 pagesTD 1 Correction - 1Soufiane Frahtia30Pas encore d'évaluation
- Résumé Cours Chap 1 2 3Document12 pagesRésumé Cours Chap 1 2 3torkitaherPas encore d'évaluation
- Chapitre 2Document16 pagesChapitre 2Salmi AbdelkaderPas encore d'évaluation
- Correction Test Mthodes-Numriques 15 - 11 - 2020Document3 pagesCorrection Test Mthodes-Numriques 15 - 11 - 2020simerabettayeb14Pas encore d'évaluation
- Modelisation PDFDocument10 pagesModelisation PDFAppia CekaPas encore d'évaluation
- TP1 LagrangeDocument4 pagesTP1 LagrangeOuijdane MaaPas encore d'évaluation
- Fiche de Perso (Néant)Document4 pagesFiche de Perso (Néant)Moomba BazPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Chapitre 4Document49 pagesChapitre 4ZERARKA Mohamed Fawzi100% (1)
- CHAPITRE 1 - GéneralitésDocument9 pagesCHAPITRE 1 - GéneralitésZERARKA Mohamed FawziPas encore d'évaluation
- Chapitre 02Document87 pagesChapitre 02ZERARKA Mohamed FawziPas encore d'évaluation
- Chapitre 4Document49 pagesChapitre 4ZERARKA Mohamed Fawzi100% (1)
- SérieTD CapteursDocument7 pagesSérieTD CapteursZERARKA Mohamed FawziPas encore d'évaluation
- Capteur de PositionDocument17 pagesCapteur de PositionboudiarPas encore d'évaluation
- AidrousAchour SfihikahinaDocument74 pagesAidrousAchour SfihikahinaMohamed HaddadPas encore d'évaluation
- Pointage + AttestationDocument2 pagesPointage + AttestationZERARKA Mohamed FawziPas encore d'évaluation
- Presentation StageDocument34 pagesPresentation StageZERARKA Mohamed FawziPas encore d'évaluation
- TP 2 SMVDocument5 pagesTP 2 SMVZERARKA Mohamed FawziPas encore d'évaluation
- TP 3 SMVDocument13 pagesTP 3 SMVZERARKA Mohamed FawziPas encore d'évaluation
- Fadi Projet 1Document6 pagesFadi Projet 1ZERARKA Mohamed FawziPas encore d'évaluation
- Définition de ModélisationDocument5 pagesDéfinition de ModélisationJordan LawsonPas encore d'évaluation
- Correction TD4 AsservDocument4 pagesCorrection TD4 AsservredPas encore d'évaluation
- Houria KessaiDocument43 pagesHouria KessaiMht Abdallah AbdoulayePas encore d'évaluation
- Pr. Mustapha JOHRIDocument32 pagesPr. Mustapha JOHRIبروليتارياPas encore d'évaluation
- Révision 2020 2021 Analyse NumériqueDocument2 pagesRévision 2020 2021 Analyse NumériquececzczcPas encore d'évaluation
- TD Intro CDMDocument2 pagesTD Intro CDMtml137310Pas encore d'évaluation
- Prevision A La DemandeDocument13 pagesPrevision A La Demandeayoub madaniPas encore d'évaluation
- Morphological Optimization Algorithm - BALK Bouchra - SIRAJ-SANI SalmaDocument24 pagesMorphological Optimization Algorithm - BALK Bouchra - SIRAJ-SANI SalmaSalma SIRAJ-SANIPas encore d'évaluation
- TD Revisions PDFDocument2 pagesTD Revisions PDFMichée KadioPas encore d'évaluation
- Chap LIDocument16 pagesChap LInabilshfPas encore d'évaluation
- Corrige0819 System de Gestion ProgramméDocument8 pagesCorrige0819 System de Gestion ProgramméviximPas encore d'évaluation
- QCM Microéconomie s1Document4 pagesQCM Microéconomie s1O zPas encore d'évaluation
- TD MMC - 23 24 - Serie1 BisDocument2 pagesTD MMC - 23 24 - Serie1 BiskholkhalPas encore d'évaluation
- Chap4 ProbaDocument10 pagesChap4 ProbaOumaima FakhrPas encore d'évaluation
- 06 Resolution 2014 2015 Part2Document69 pages06 Resolution 2014 2015 Part2Ml AkPas encore d'évaluation
- Chapitre 02Document13 pagesChapitre 02Mehdi MansouriPas encore d'évaluation
- Res EM 1Document2 pagesRes EM 1abdoPas encore d'évaluation
- DS1 3si Algo 2021 2022Document4 pagesDS1 3si Algo 2021 2022Younes Bel BahriPas encore d'évaluation
- SMI S4 Structures Données Chap1Document10 pagesSMI S4 Structures Données Chap1adjafuikomiaudreyPas encore d'évaluation
- 5 DualitéDocument47 pages5 DualitéAdilPas encore d'évaluation
- TD2 SpinDocument3 pagesTD2 SpinAmine El FilaliPas encore d'évaluation
- Projet de Fin D'étude: Etude de L'identification en Boucle Fermée - Application en Simulation Et en Temps RéelDocument85 pagesProjet de Fin D'étude: Etude de L'identification en Boucle Fermée - Application en Simulation Et en Temps RéelAhmed ZaidiPas encore d'évaluation
- Méthodes Prévision DemandeDocument13 pagesMéthodes Prévision DemandeAnass Cherrafi100% (1)
- Nouveaux Modèles Et Algorithmes de Graphes Pour La BiologieDocument3 pagesNouveaux Modèles Et Algorithmes de Graphes Pour La Biologiewilfried AGBETOPas encore d'évaluation
- Dokumen - Tips Cryptographie Fabien Teytaud Introduction Histoire TeytaudfilescourscryptocryptopdfDocument121 pagesDokumen - Tips Cryptographie Fabien Teytaud Introduction Histoire TeytaudfilescourscryptocryptopdfAzeddine EL-MAMOUNIPas encore d'évaluation
- Tdad 1920Document1 pageTdad 1920ilyes0% (1)
- Révision CryptographieDocument2 pagesRévision CryptographieIliasse Guindo100% (1)
- Systèmes Asservis: Chapitre # 03: La Transformée en ZDocument83 pagesSystèmes Asservis: Chapitre # 03: La Transformée en ZAyman OuhajiPas encore d'évaluation
- Intégration Numérique (Version Finale)Document58 pagesIntégration Numérique (Version Finale)Narine ImanePas encore d'évaluation
- Chapitre IIDocument6 pagesChapitre IIAdouaneNassimPas encore d'évaluation