Vous aimerez peut-être aussi
- COURS-Tansitoire-Ordre 2Document10 pagesCOURS-Tansitoire-Ordre 2villa rabehPas encore d'évaluation
- Chapitre 1Document57 pagesChapitre 1Bilal Houssein RoblehPas encore d'évaluation
- Corrigé Controle API 2019Document5 pagesCorrigé Controle API 2019amine jabriPas encore d'évaluation
- TD N°3 Réponse Temporelle Des Systèmes Linéaires: Exercice 1Document7 pagesTD N°3 Réponse Temporelle Des Systèmes Linéaires: Exercice 1Nasro SiotousPas encore d'évaluation
- Electrocinetique Chapitre3Document13 pagesElectrocinetique Chapitre3dbPas encore d'évaluation
- Cc3 Equations Aux Dérivées Partielles EDPDocument17 pagesCc3 Equations Aux Dérivées Partielles EDPHadjer zitPas encore d'évaluation
- Sujets TD AutomatiqueDocument51 pagesSujets TD Automatiquekarim belaliaPas encore d'évaluation
- Manual de Solues Cap 4Document43 pagesManual de Solues Cap 4Larissa KelmerPas encore d'évaluation
- Algorithmes Aleatoires Pour Recherche Et Classement Dans Une Liste de NombresDocument6 pagesAlgorithmes Aleatoires Pour Recherche Et Classement Dans Une Liste de NombresSaid GhazaouiPas encore d'évaluation
- SC ExpDocument36 pagesSC Explinda Ben AttiaPas encore d'évaluation
- EquadiffDocument14 pagesEquadiffBohr DanPas encore d'évaluation
- Résolution Numérique D'équations Différentielles: 0 Du (T) DTDocument8 pagesRésolution Numérique D'équations Différentielles: 0 Du (T) DTahmeed qaaisPas encore d'évaluation
- Chap 4Document6 pagesChap 4ABMOHEPas encore d'évaluation
- Matlab RC1Document11 pagesMatlab RC1Nawal KhemamssiaPas encore d'évaluation
- ACFrOgABx5dsZuFjHgF16C1lCo9KQ4IMq9mF GZ1eYUaZfvkELDd6V1lDp Mk5qsPzxwSvBKKOP3t73xv5xQ7ZiGLhf6XCWSnO65a9QM5nmniIHjRjMTBvZAPLV-hRjCVFEgPzbt CGBIUqnvHQbDocument4 pagesACFrOgABx5dsZuFjHgF16C1lCo9KQ4IMq9mF GZ1eYUaZfvkELDd6V1lDp Mk5qsPzxwSvBKKOP3t73xv5xQ7ZiGLhf6XCWSnO65a9QM5nmniIHjRjMTBvZAPLV-hRjCVFEgPzbt CGBIUqnvHQbManar BahiPas encore d'évaluation
- Cours Physique Résumé Cours Pour Revision 2015 2016 (MR Abidi Ramzi) PDFDocument30 pagesCours Physique Résumé Cours Pour Revision 2015 2016 (MR Abidi Ramzi) PDFBayrem MarzouguiPas encore d'évaluation
- Cours - Physique Dipôle RC - Bac Math (2010-2011) MR Boussada Atef PDFDocument4 pagesCours - Physique Dipôle RC - Bac Math (2010-2011) MR Boussada Atef PDFSami Ketata100% (1)
- Exercices AsservissementDocument14 pagesExercices AsservissementUineylaah Bayebec100% (1)
- TD 1 20 22 23Document2 pagesTD 1 20 22 23amina bassouPas encore d'évaluation
- PCSI5 Chapitre6Document14 pagesPCSI5 Chapitre6Tú Lê100% (1)
- 6 Exercices Equations DifferentiellesDocument8 pages6 Exercices Equations DifferentiellesssdsqdPas encore d'évaluation
- DS2 Électro+optique PDFDocument6 pagesDS2 Électro+optique PDFAnis SouissiPas encore d'évaluation
- 8 - Equations Différentielles LinéairesDocument15 pages8 - Equations Différentielles Linéaires•ค๓ค- ๏гɭคภєPas encore d'évaluation
- Méthodes IdentificationDocument9 pagesMéthodes IdentificationAyoub Django RFPas encore d'évaluation
- Devoir Algo Modèle SimplifiéDocument4 pagesDevoir Algo Modèle SimplifiéGoOD GirLPas encore d'évaluation
- DM TransitoireDocument3 pagesDM Transitoiremh2742004Pas encore d'évaluation
- Problème 2Document2 pagesProblème 2Hiba Allah El AhnafPas encore d'évaluation
- Zarkov EF2009 ModelisationDocument8 pagesZarkov EF2009 ModelisationRachid BENBEYPas encore d'évaluation
- Diaporama MathématiqueDocument132 pagesDiaporama MathématiqueSami BaouPas encore d'évaluation
- TD Electrocinetique Serie3Document2 pagesTD Electrocinetique Serie3villa rabehPas encore d'évaluation
- Concours Externe SP Cial de L Agr Gation Section Math Matiques - Sujet de L Preuve Crite de La Session 2022 2014Document20 pagesConcours Externe SP Cial de L Agr Gation Section Math Matiques - Sujet de L Preuve Crite de La Session 2022 2014ruth0x147Pas encore d'évaluation
- TD1 3ma232Document7 pagesTD1 3ma232georges.mendes000Pas encore d'évaluation
- 1 G en Eralit Es: 222. Exemples D' Equations Aux D Eriv Ees Partielles Lin EairesDocument3 pages1 G en Eralit Es: 222. Exemples D' Equations Aux D Eriv Ees Partielles Lin EairesJean Djibersou BiryangPas encore d'évaluation
- 2003 09 Polynesie Correction Exo2 CondensateurDocument3 pages2003 09 Polynesie Correction Exo2 CondensateurAli WahbiPas encore d'évaluation
- Amphi1 Equation Transport PrintDocument46 pagesAmphi1 Equation Transport PrintGhassen OrfPas encore d'évaluation
- DS03 Transitoire Cinetique CompletDocument7 pagesDS03 Transitoire Cinetique Completvidobow399Pas encore d'évaluation
- Chapitre3 2020Document37 pagesChapitre3 2020nathanlamonPas encore d'évaluation
- Td5 Oscillateurs Supplement CorrDocument1 pageTd5 Oscillateurs Supplement CorrAdri LebPas encore d'évaluation
- Exo15-17 CorDocument6 pagesExo15-17 CorSk CissePas encore d'évaluation
- TP ELECTRONIQUE ANALOGIQUE DE SANHOUIDI SOMKIETA STEPHANE (Récupération Automatique)Document15 pagesTP ELECTRONIQUE ANALOGIQUE DE SANHOUIDI SOMKIETA STEPHANE (Récupération Automatique)Sanhouidi StephanePas encore d'évaluation
- Chapitre 2 - Partie 2 - Hacheur SerieDocument19 pagesChapitre 2 - Partie 2 - Hacheur SerieValkheir DheibPas encore d'évaluation
- MMC Exams Corriges 15Document57 pagesMMC Exams Corriges 15Larayedh Alaeddine77% (22)
- Colle 10 ExercicesDocument6 pagesColle 10 ExercicesLOUEMBET Bourget100% (1)
- Chap - 1 - Séance 01 - Généralités Sur Les SystèmesDocument6 pagesChap - 1 - Séance 01 - Généralités Sur Les SystèmeskhaledPas encore d'évaluation
- RC RL RLCDocument13 pagesRC RL RLCrawen jawediPas encore d'évaluation
- Dipole RC CoursDocument4 pagesDipole RC CoursImed BenrhoumaPas encore d'évaluation
- 5automatique Linéaire Continue Exercices 01Document14 pages5automatique Linéaire Continue Exercices 01Yahya AIDARAPas encore d'évaluation
- TP Systeme AsservisDocument6 pagesTP Systeme AsservisHamza Hamza ToumliltPas encore d'évaluation
- CorrigeExamen17 18 BerradaDocument4 pagesCorrigeExamen17 18 BerradaAwatif BePas encore d'évaluation
- Chapitre 1 MDF Appliquée Aux EDP ElliptiquesDocument31 pagesChapitre 1 MDF Appliquée Aux EDP Elliptiquesel mlili YoussefPas encore d'évaluation
- Electrocinetique Regimes TransitoiresDocument8 pagesElectrocinetique Regimes TransitoiresSykdom SmashesPas encore d'évaluation
- Corrige TestDocument3 pagesCorrige TestMariem JlassiPas encore d'évaluation
- Projet MefDocument45 pagesProjet MefClaille Darlin NZENGUEPas encore d'évaluation
- Sujet Corrige EF Electricité 19-20Document3 pagesSujet Corrige EF Electricité 19-20Doumams NchPas encore d'évaluation
- Chapitre4 SecondOrdreDocument13 pagesChapitre4 SecondOrdrelaura22130Pas encore d'évaluation
- Methodes Numeriques PDE 1 PDFDocument96 pagesMethodes Numeriques PDE 1 PDFafafPas encore d'évaluation
- Cours Difference FinieDocument6 pagesCours Difference FinieAnonymous HbJyXVG100% (1)
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Serie TD MPD Ecoult Fluides A Travers Milieux PoreuxDocument2 pagesSerie TD MPD Ecoult Fluides A Travers Milieux PoreuxJimmy Hend Khrat100% (2)
- Similitudes 4ème Mathématiques 1Document9 pagesSimilitudes 4ème Mathématiques 1Mohammed GharabPas encore d'évaluation
- Merged 20200621 021907Document52 pagesMerged 20200621 021907Serge bonel DafonsecaPas encore d'évaluation
- Ipe 80Document2 pagesIpe 80Hosni MdiniPas encore d'évaluation
- GuideTechnique LCPC GTPORTANCE PDFDocument28 pagesGuideTechnique LCPC GTPORTANCE PDFMohamed Amine Zemouri100% (1)
- B Oscillateurs Et OndesDocument33 pagesB Oscillateurs Et OndesjPas encore d'évaluation
- DL Béton Précontraint HJDocument10 pagesDL Béton Précontraint HJHAMZA KANANEPas encore d'évaluation
- MVT Plan Doc ProfDocument6 pagesMVT Plan Doc ProfLaurent Bertrand OtabelaPas encore d'évaluation
- Hourdis de PontsDocument34 pagesHourdis de Pontskhengui100% (1)
- Corrigé de L'épreuve Du 27 JuinDocument2 pagesCorrigé de L'épreuve Du 27 JuinAime Christian N'drinPas encore d'évaluation
- Serie N2 5D PC L Koubeni 2021-2022 EhmeityDocument1 pageSerie N2 5D PC L Koubeni 2021-2022 EhmeityEl Hassen Med MoustaphaPas encore d'évaluation
- RA20 Lycee GT Ter Philo Simondon 1294346Document17 pagesRA20 Lycee GT Ter Philo Simondon 1294346Isabelle PiconPas encore d'évaluation
- Le MouvementDocument3 pagesLe Mouvementfarouk benjemaaPas encore d'évaluation
- MP PHYSIQUE MINES 2 2007.enonceDocument6 pagesMP PHYSIQUE MINES 2 2007.enonceAnass TakfaPas encore d'évaluation
- Chapitre2 Résistance Des Matériaux 1Document3 pagesChapitre2 Résistance Des Matériaux 1YattePas encore d'évaluation
- Cat CSZ Ifc6023 Hm0 CSZ Oi6023 Hm3Document2 pagesCat CSZ Ifc6023 Hm0 CSZ Oi6023 Hm3Adem EssidPas encore d'évaluation
- Generalites FonctionDocument6 pagesGeneralites FonctionCamara layePas encore d'évaluation
- DTU 23.5 - Planchers À Poutrelles en Béton - P1-2 - Mai 2019Document13 pagesDTU 23.5 - Planchers À Poutrelles en Béton - P1-2 - Mai 2019sautier_thomasPas encore d'évaluation
- Fiche Exercices Jour Semaine Mois CP OyM0f84GDocument2 pagesFiche Exercices Jour Semaine Mois CP OyM0f84GGuyPas encore d'évaluation
- Correction Série Probabilités 2 Bac SCDocument8 pagesCorrection Série Probabilités 2 Bac SCNouhaila ChairPas encore d'évaluation
- Cotes Tolérancées - PROF NASRI PDFDocument7 pagesCotes Tolérancées - PROF NASRI PDFiman khadirPas encore d'évaluation
- Code - Aster: Comment Creuser Un Tunnel: Méthodologie D'excavationDocument24 pagesCode - Aster: Comment Creuser Un Tunnel: Méthodologie D'excavationkaoutarPas encore d'évaluation
- tp2 CapteursDocument1 pagetp2 CapteursMohamed MtsPas encore d'évaluation
- Tréfilage Des Fils Cuivreux Ultra-Fins: Ning YUDocument9 pagesTréfilage Des Fils Cuivreux Ultra-Fins: Ning YUZINE SalouaPas encore d'évaluation
- Copie de Introduction IlyesDocument3 pagesCopie de Introduction Ilyesabed mrzPas encore d'évaluation
- TP Materiaux de Construction - 1Document18 pagesTP Materiaux de Construction - 1IsmailPas encore d'évaluation
- Couples de Forces - CopieDocument28 pagesCouples de Forces - CopiefontainePas encore d'évaluation
- Exercice Arithmétique Bac SDocument4 pagesExercice Arithmétique Bac SMae AboPas encore d'évaluation
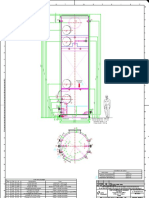
- Plan de Détail Du Stripeur SRV 2200 - 3M en PPH/SVR + Calorifuge + Enveloppe en SVRDocument1 pagePlan de Détail Du Stripeur SRV 2200 - 3M en PPH/SVR + Calorifuge + Enveloppe en SVRBen Abdallah BecemPas encore d'évaluation
- Simil 001 FDocument3 pagesSimil 001 Fⴰⴱⵓ ⴰⵍⴰⴻ100% (1)