Vous aimerez peut-être aussi
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- 11720120710161753Document9 pages11720120710161753Youssef Ben KhemisPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Suiveur de Ligne PDFDocument20 pagesSuiveur de Ligne PDFBilel DekhiliPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Énergie 1Document15 pagesÉnergie 1elie chane100% (1)
- Capteurs Mecanique ProfDocument7 pagesCapteurs Mecanique ProfAbidi YoussefPas encore d'évaluation
- Rapport de TP de MecaniqueDocument8 pagesRapport de TP de MecaniqueHenry JOSIASPas encore d'évaluation
- Presentation Picos18Document22 pagesPresentation Picos18Saf Bes100% (1)
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyPas encore d'évaluation
- Sadt 2Document12 pagesSadt 2Armand EssPas encore d'évaluation
- CH 3 MethodeDocument13 pagesCH 3 MethodeMohamedBenKacemPas encore d'évaluation
- Scénario Pédagogique Th1sq2GRAFCET2SCDocument1 pageScénario Pédagogique Th1sq2GRAFCET2SCdahech hichem100% (1)
- Semestre 2 DS 1 2008-2009 Leve Personne OriorDocument8 pagesSemestre 2 DS 1 2008-2009 Leve Personne OriorKhawla BkPas encore d'évaluation
- TP CAO 3D Pompe A MainDocument14 pagesTP CAO 3D Pompe A MainBouraoui Ben AyedPas encore d'évaluation
- Controle Theory Mecanismes Janvier 2015Document3 pagesControle Theory Mecanismes Janvier 2015Achraf El aouamePas encore d'évaluation
- M25 Dépannage Des Compresseurs Et de Moteurs Pneumatiques - 112706Document14 pagesM25 Dépannage Des Compresseurs Et de Moteurs Pneumatiques - 112706mohamed toumiPas encore d'évaluation
- Adams TP LibreDocument20 pagesAdams TP LibreImen HammoudaPas encore d'évaluation
- Exercice Etau Pour MVDocument2 pagesExercice Etau Pour MVYoussef YouriPas encore d'évaluation
- TP Secateur Systeme Eleve v3 PDFDocument6 pagesTP Secateur Systeme Eleve v3 PDFsafikssPas encore d'évaluation
- Poly 1 Cde Séquentielle IcamDocument44 pagesPoly 1 Cde Séquentielle IcamThéo FERNANDEZPas encore d'évaluation
- Rapport de Mini Projet DDocument17 pagesRapport de Mini Projet DOumar TraoréPas encore d'évaluation
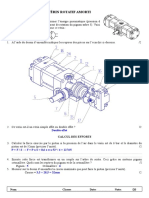
- TD - Vérin Rotatif AmortiDocument5 pagesTD - Vérin Rotatif AmortiLAILA BNPas encore d'évaluation
- td3 Ci1 Capteur CorDocument4 pagestd3 Ci1 Capteur CorbecemPas encore d'évaluation
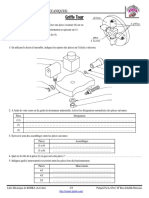
- Griffe de Tour PDFDocument3 pagesGriffe de Tour PDFAdramé AdraméPas encore d'évaluation
- EngrenagesDocument12 pagesEngrenagesMouwadine Moussa100% (1)
- Ge Esa 2018Document16 pagesGe Esa 2018othmane mrichPas encore d'évaluation
- Sujet DefiniDocument15 pagesSujet DefiniSynthia KapengaPas encore d'évaluation
- Vis EcrouDocument31 pagesVis Ecrouwissal khammeriPas encore d'évaluation
- 01 - Structure Des Systèmes MicroprogrammésDocument40 pages01 - Structure Des Systèmes Microprogrammésrachid BASSELAMPas encore d'évaluation
- Le Gemma V2 20 04 21Document12 pagesLe Gemma V2 20 04 21Phenix PhenixPas encore d'évaluation
- Corrigé Examen Terminal CFAO M1 CM 2017Document1 pageCorrigé Examen Terminal CFAO M1 CM 2017Salim RezkiPas encore d'évaluation
- Activité Semelles ConnectéesDocument7 pagesActivité Semelles Connectéesdahech hichemPas encore d'évaluation
- CI8-TP Liaisons Schema Cine Portail - SetDocument4 pagesCI8-TP Liaisons Schema Cine Portail - SetSoufiane Daif0% (2)
- DS1 - DMéc - Cellule Flexible D'usinageDocument3 pagesDS1 - DMéc - Cellule Flexible D'usinageElafif HamdiPas encore d'évaluation
- Compacteur de CanetteDocument32 pagesCompacteur de Canettedoumbo39Pas encore d'évaluation
- QCM SolidworksDocument1 pageQCM SolidworksAhmed Nasfi100% (1)
- (TDM) (CO) Theorie Des MecanismesDocument13 pages(TDM) (CO) Theorie Des MecanismesKhaled SouaissaPas encore d'évaluation
- I-Mise en Situation:: (Voir Livre de TP Page 19) ConclusionDocument3 pagesI-Mise en Situation:: (Voir Livre de TP Page 19) Conclusionhammamin2008Pas encore d'évaluation
- Corrigé S1 2013Document7 pagesCorrigé S1 2013youssefelalaouiPas encore d'évaluation
- 3 TP Grille Pain ElDocument4 pages3 TP Grille Pain ElHASSAN OUMANSOURPas encore d'évaluation
- Utilisation Logipicv2Document20 pagesUtilisation Logipicv2alyamor100% (1)
- Commande NumériqueDocument17 pagesCommande NumériqueDayang Dayang100% (1)
- PhA ESA 2018Document8 pagesPhA ESA 2018othmane mrichPas encore d'évaluation
- DM Quille PendulaireDocument5 pagesDM Quille PendulaireFilouPas encore d'évaluation
- TD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFDocument49 pagesTD-théories Des Mécanismes-Mr MOUNIR 2022-23 PDFmukoPas encore d'évaluation
- 13 - Hydraulique - Schematisation PDFDocument15 pages13 - Hydraulique - Schematisation PDFSheikh Al-shoteriPas encore d'évaluation
- Grafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesDocument8 pagesGrafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesAFADPas encore d'évaluation
- Examen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFDocument9 pagesExamen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFmabroukPas encore d'évaluation
- Exercice Dessin WordDocument8 pagesExercice Dessin WordParako HabouPas encore d'évaluation
- TD 3 Loi Entrée Sortie Par Fermeture GéométriqueDocument4 pagesTD 3 Loi Entrée Sortie Par Fermeture GéométriqueChokri AtefPas encore d'évaluation
- Auto Ma Ti Que Continue 2003Document32 pagesAuto Ma Ti Que Continue 2003hakkayPas encore d'évaluation
- Plan Travail MemoireDocument37 pagesPlan Travail Memoirebatambakayumba2Pas encore d'évaluation
- BG Cours CSDocument70 pagesBG Cours CSAbdel DaaPas encore d'évaluation
- Sujet 4Document5 pagesSujet 4elie chanePas encore d'évaluation
- Rapport p21 s6Document15 pagesRapport p21 s6dibyange650Pas encore d'évaluation
- Projet Modélisation D'une Éolienne: Vitesse de Rotation D'une Éolienne Via PythonDocument6 pagesProjet Modélisation D'une Éolienne: Vitesse de Rotation D'une Éolienne Via PythonEvan's ZiguiPas encore d'évaluation
- TP Révisions Moteur EssenceDocument8 pagesTP Révisions Moteur EssenceCorinne CathelinPas encore d'évaluation
- Rapport Projet Drone v2Document14 pagesRapport Projet Drone v2isadorarafaelstreamPas encore d'évaluation
- Conception Hélice Tah Les FousDocument9 pagesConception Hélice Tah Les FouscaultcorentinPas encore d'évaluation
- Bia 2020Document21 pagesBia 2020Christophe MarottaPas encore d'évaluation
- FRE-02 Mcar Part-2 and Is v2.9Document212 pagesFRE-02 Mcar Part-2 and Is v2.9glodi makimaPas encore d'évaluation
- Les Ailes de La GloireDocument35 pagesLes Ailes de La GloiresylvainPas encore d'évaluation
- Boarding PassDocument4 pagesBoarding PassSarahPas encore d'évaluation
- Helistation GuideDocument88 pagesHelistation GuideSaidi HocinePas encore d'évaluation
- Aéronautique - Arrêté Titre Normal & Collectif - Promotion Du 14 Juillet 2019Document7 pagesAéronautique - Arrêté Titre Normal & Collectif - Promotion Du 14 Juillet 2019T MMPas encore d'évaluation
- Aerojournal 2019-04 PDFDocument84 pagesAerojournal 2019-04 PDFadd2mix100% (1)
- MémoireDocument159 pagesMémoireRahel BAPas encore d'évaluation
- Norme AtaDocument12 pagesNorme AtaNdeye Thiaba FALLPas encore d'évaluation
- Solucoes Zill-Cullen-Wright-Advanced Engineering Mathematics V3 3ed PDFDocument394 pagesSolucoes Zill-Cullen-Wright-Advanced Engineering Mathematics V3 3ed PDFJoão MPas encore d'évaluation
- TP AerodunamiqueDocument10 pagesTP AerodunamiqueAbd El Basset BeNmansour0% (1)
- Fiche Aerodrome GHRISSDocument11 pagesFiche Aerodrome GHRISSOuarab WassimPas encore d'évaluation
- Collins Aerospace Catalogue de Formation 2020Document52 pagesCollins Aerospace Catalogue de Formation 2020Ramzi Benmounah100% (1)
- Flight Simulator Glossaire Et Guide Des Touches - Guide Complet Microsoft Flight Simulator, Tutoriaux, Aide, Astuces - JeuxvidDocument1 pageFlight Simulator Glossaire Et Guide Des Touches - Guide Complet Microsoft Flight Simulator, Tutoriaux, Aide, Astuces - Jeuxvidroland1313Pas encore d'évaluation
- Hong KongDocument17 pagesHong KongOuarab WassimPas encore d'évaluation
- BO 7144 FRDocument71 pagesBO 7144 FRGALI MOAADPas encore d'évaluation
- Avions 227Document100 pagesAvions 227Titanius44440100% (2)
- Boarding PassDocument1 pageBoarding Passy.elhezzamePas encore d'évaluation
- Rapport de Stage Ta3iDocument24 pagesRapport de Stage Ta3iKadiro OJ75% (4)
- FICHE SEQUENCE Mise en Oeuvre TP1Document15 pagesFICHE SEQUENCE Mise en Oeuvre TP1bink-simracingPas encore d'évaluation
- Enr 1.10Document6 pagesEnr 1.10Mohamadou BallaPas encore d'évaluation
- Methodologie Des Communications Pilote ControleurDocument7 pagesMethodologie Des Communications Pilote ControleurIrwin TaputuaraiPas encore d'évaluation
- Experience PhraseologieDocument3 pagesExperience PhraseologieThe Gamer 73Pas encore d'évaluation
- Secteur Du Transport Aerien en Afrique Centrale Et Occidentale - Banque Africaine de DeveloppementDocument27 pagesSecteur Du Transport Aerien en Afrique Centrale Et Occidentale - Banque Africaine de DeveloppementPaul Evrard Okaingni100% (1)
- Coordonate Zbor 2014 2Document72 pagesCoordonate Zbor 2014 2Catalin DimulescuPas encore d'évaluation
- Precis Aerodynamiqe V7Document56 pagesPrecis Aerodynamiqe V7Mohamed ABOUZRARPas encore d'évaluation
- Meyssan Imposture Chap1Document16 pagesMeyssan Imposture Chap1Grégoire2100% (1)
- Avions 003 (OCR)Document52 pagesAvions 003 (OCR)Roque Gonçalves Ferreira JuniorPas encore d'évaluation
- Apsim 19 DS - MPSI - PCSIDocument20 pagesApsim 19 DS - MPSI - PCSIZaineb AbbadPas encore d'évaluation
- Easb VortexDocument11 pagesEasb VortexCédric BoblinPas encore d'évaluation
- YQB - Québec à la conquête de l'air: Québec City. The Sky's the Limit!D'EverandYQB - Québec à la conquête de l'air: Québec City. The Sky's the Limit!Pas encore d'évaluation
- Terroristes d'ailleurs: Inspiré de la tragédie du vol MH370D'EverandTerroristes d'ailleurs: Inspiré de la tragédie du vol MH370Pas encore d'évaluation
- Histoire de l'aviation: Les Grands Articles d'UniversalisD'EverandHistoire de l'aviation: Les Grands Articles d'UniversalisÉvaluation : 5 sur 5 étoiles5/5 (1)