Vous aimerez peut-être aussi
- Calculer Une Structure, de La Théorie À L'exempleDocument480 pagesCalculer Une Structure, de La Théorie À L'exempleHaaikeP86% (14)
- MDS - Partie 1 - Chap 1 À 9 - Généralités Et Rappels Sur Les Structures Et Les MatériauxDocument90 pagesMDS - Partie 1 - Chap 1 À 9 - Généralités Et Rappels Sur Les Structures Et Les MatériauxCharles Quindt100% (2)
- Plasticit ÉDocument20 pagesPlasticit ÉAnonymous upDV1P6S0Pas encore d'évaluation
- MMC Enim TDDocument16 pagesMMC Enim TDWassim Ben SalahPas encore d'évaluation
- Cnam UTC103 RésistanceDesMatériaux Chapitre15Document25 pagesCnam UTC103 RésistanceDesMatériaux Chapitre15Takanori YasudaPas encore d'évaluation
- Rappels MathématiquesDocument10 pagesRappels MathématiquesHamza HamizoPas encore d'évaluation
- Résumé MMCDocument10 pagesRésumé MMCAminChaari67% (3)
- CHAPITRE 0.généralités Et Définitions de BaseDocument37 pagesCHAPITRE 0.généralités Et Définitions de Bases.msofianePas encore d'évaluation
- TD MMC - 23 24 - Serie1 BisDocument2 pagesTD MMC - 23 24 - Serie1 BiskholkhalPas encore d'évaluation
- MMC - Chap - 2 - Tenseur de Déformation - cours-COURS BOUKHAROUBADocument14 pagesMMC - Chap - 2 - Tenseur de Déformation - cours-COURS BOUKHAROUBAmina ouchPas encore d'évaluation
- TD MMC Serie1 - 22 23 1Document2 pagesTD MMC Serie1 - 22 23 1Mouhcine OufkirPas encore d'évaluation
- Calcul Des Structures - Chapitre4 - 2020 - 2021Document27 pagesCalcul Des Structures - Chapitre4 - 2020 - 2021somaya ehPas encore d'évaluation
- Chapitre 3Document16 pagesChapitre 3Njikam SouleyPas encore d'évaluation
- Cours de RDMDocument134 pagesCours de RDMflorent karel epoh foumanePas encore d'évaluation
- Système de CoordoonéesDocument8 pagesSystème de CoordoonéeswalidfouedmahmoudiPas encore d'évaluation
- Chapitre Ii Les Efforts InternesDocument27 pagesChapitre Ii Les Efforts InternesAYADI IMEDPas encore d'évaluation
- TD 08 Corrigé - Calcul VectorielDocument3 pagesTD 08 Corrigé - Calcul Vectorielbhs channelPas encore d'évaluation
- Untitled 2Document1 pageUntitled 2Nam KolyaPas encore d'évaluation
- Chapitre 1 Rappels Sur Les Opérateurs Scalaires Et VectorielsDocument9 pagesChapitre 1 Rappels Sur Les Opérateurs Scalaires Et VectorielsNoOr HanePas encore d'évaluation
- 2-Rappels Mathematiques PDFDocument8 pages2-Rappels Mathematiques PDFFox BenPas encore d'évaluation
- Ch2 Cinematique Du Point Materiel 1Document8 pagesCh2 Cinematique Du Point Materiel 1Wissem BejaouiPas encore d'évaluation
- MVT Et ForcesDocument11 pagesMVT Et Forcescharlene.levrat02Pas encore d'évaluation
- CH VI Cercle de Mohr 2020Document8 pagesCH VI Cercle de Mohr 2020Hamza HaikiPas encore d'évaluation
- Chapitre 1-Sollicitations ComposéesDocument13 pagesChapitre 1-Sollicitations Composéesbilal bedrouniPas encore d'évaluation
- Cours de RDMDocument133 pagesCours de RDMRomaric TchakoutePas encore d'évaluation
- CC2 - Calcul Des Structures 2017 - 2018Document2 pagesCC2 - Calcul Des Structures 2017 - 2018Aya ChikerPas encore d'évaluation
- ING 3 Analyses Des DonnéesDocument44 pagesING 3 Analyses Des DonnéesEleanor ShellstropPas encore d'évaluation
- CharpenteDocument56 pagesCharpenteSaid MrfPas encore d'évaluation
- Chapitre IDocument22 pagesChapitre Iنضالہٰ يٰونايٰتہٰدPas encore d'évaluation
- Chapitre 3 Refraction SismiqueDocument22 pagesChapitre 3 Refraction SismiqueRaoul officielPas encore d'évaluation
- Econométrie de PanelDocument26 pagesEconométrie de PanelShams DayanPas encore d'évaluation
- Ex Ef Matrice Raideur Poutre PDFDocument3 pagesEx Ef Matrice Raideur Poutre PDFAnonymous 0tT3SePas encore d'évaluation
- Calcul Vectoriel Rappels Mathematiques Iut 1ere AnnéeDocument16 pagesCalcul Vectoriel Rappels Mathematiques Iut 1ere AnnéeCamara Cheikh A.B.A.KPas encore d'évaluation
- Corrige MMC L3 2011S2Document4 pagesCorrige MMC L3 2011S2Leopold MokaPas encore d'évaluation
- La Méthode Des Éléments Finis-1Document5 pagesLa Méthode Des Éléments Finis-1Taoufik Lui MêmePas encore d'évaluation
- Elements Finis de PoutresDocument11 pagesElements Finis de Poutresyowa19nPas encore d'évaluation
- Chapitre 01Document5 pagesChapitre 01Mohammed ALMUSHIAAPas encore d'évaluation
- 2 - Chapitre1 Rappels MathématiquesDocument5 pages2 - Chapitre1 Rappels MathématiquesBílãl ChïkhíPas encore d'évaluation
- RDM Khemili 2021 Chap2 1Document33 pagesRDM Khemili 2021 Chap2 1Ahmed KhalilPas encore d'évaluation
- BTP008 05 Poteaux-MétalliquesDocument20 pagesBTP008 05 Poteaux-MétalliquesMarion GaudéPas encore d'évaluation
- Complexes SpiraleDocument3 pagesComplexes Spiralefrançois dupontPas encore d'évaluation
- Chapitre ViiDocument13 pagesChapitre ViiFerhat OutalebPas encore d'évaluation
- Le Gradient D'une Fonction ScalaireDocument3 pagesLe Gradient D'une Fonction ScalaireSami NasryPas encore d'évaluation
- GradientDocument3 pagesGradientrihame92Pas encore d'évaluation
- Sujet MMDocument10 pagesSujet MMJordan TADONBOUPas encore d'évaluation
- Sri 2 DS 220Document1 pageSri 2 DS 220ANDAHMOU SoulaimanPas encore d'évaluation
- Memo Dep AntideplDocument3 pagesMemo Dep AntideplDrino EkayaPas encore d'évaluation
- Calcul Des Structures en Béton Armé: Concepts AvancésDocument19 pagesCalcul Des Structures en Béton Armé: Concepts AvancésHRPas encore d'évaluation
- Probastat 2Document6 pagesProbastat 2Kwamé Jah NyererePas encore d'évaluation
- 03.2 - Cinématique Du Point - TD2Document4 pages03.2 - Cinématique Du Point - TD2Khaled JberiPas encore d'évaluation
- Exercice 2 - Chap2Document2 pagesExercice 2 - Chap2Bílãl ChïkhíPas encore d'évaluation
- 03 Deplacement Parallele Symboles de ChristoffelDocument23 pages03 Deplacement Parallele Symboles de ChristoffelBrenton MorrisonPas encore d'évaluation
- Corrigés - Série 2Document15 pagesCorrigés - Série 2thiziroarour0Pas encore d'évaluation
- Problème ADocument5 pagesProblème AKaw TarPas encore d'évaluation
- Chap 1Document49 pagesChap 1yosr magmaguiPas encore d'évaluation
- Cours 2 - Tenseur Des ContraintesDocument13 pagesCours 2 - Tenseur Des ContraintesMoussa HajjajiPas encore d'évaluation
- Chap 02 Déplacements Des Poutres en Flexion PlaneDocument15 pagesChap 02 Déplacements Des Poutres en Flexion Planeyoussouf ahmedbabaPas encore d'évaluation
- MSD Chapitre 1 - V Octobre 2020Document11 pagesMSD Chapitre 1 - V Octobre 2020CrateFXPas encore d'évaluation
- Apc Cours de Physiques TD Et TC.Document73 pagesApc Cours de Physiques TD Et TC.Magatte DiopPas encore d'évaluation
- Partie 3. Chapitre 4et5Document90 pagesPartie 3. Chapitre 4et5Francis SonkengPas encore d'évaluation
- MHMH542 (Complet)Document67 pagesMHMH542 (Complet)Ahmed KhalilPas encore d'évaluation
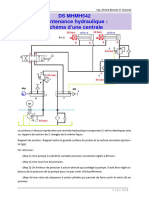
- DS MHMH542 Semaine 15Document2 pagesDS MHMH542 Semaine 15Ahmed KhalilPas encore d'évaluation
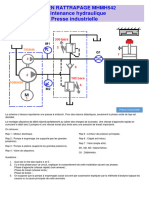
- Examen Rattrapage MHMH542 2021Document2 pagesExamen Rattrapage MHMH542 2021Ahmed KhalilPas encore d'évaluation
- Guide Capacite3Document80 pagesGuide Capacite3Ahmed KhalilPas encore d'évaluation
- Hydraulique ProprtionnelleDocument97 pagesHydraulique ProprtionnelleAhmed KhalilPas encore d'évaluation
- IntroductionDocument34 pagesIntroductionAhmed KhalilPas encore d'évaluation
- RDM Khemili 2021 Chap2 1Document33 pagesRDM Khemili 2021 Chap2 1Ahmed KhalilPas encore d'évaluation
- Mini Projet RDM6Document10 pagesMini Projet RDM6kamalPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap6Document15 pagesCours RDM-Khemili 2023-Chap6Ahmed KhalilPas encore d'évaluation
- Cours RDM-Khemili 2020-Chap1Document14 pagesCours RDM-Khemili 2020-Chap1Rossiny NganiPas encore d'évaluation
- 1 - Page de Garde - Sommaire.intro.Document8 pages1 - Page de Garde - Sommaire.intro.Mohamed Reffadi100% (1)
- Polycopié de Travaux Pratiques: Physique MécaniqueDocument18 pagesPolycopié de Travaux Pratiques: Physique MécaniquekacemoPas encore d'évaluation
- La Géophysique Pour Les Géologues - Méthodes SismiquesDocument128 pagesLa Géophysique Pour Les Géologues - Méthodes SismiquesMicha HorswillPas encore d'évaluation
- Cours RDM Chapitre IIDocument8 pagesCours RDM Chapitre IINaito Oroshi0% (1)
- RMChap3 (Traction)Document40 pagesRMChap3 (Traction)ronaldtatmenundertakerPas encore d'évaluation
- Les ForcesDocument24 pagesLes ForcesOnguetou JulesPas encore d'évaluation
- 03-11-16 Complement Des Chemins de Fer TP5 2016-2017 LRSDocument116 pages03-11-16 Complement Des Chemins de Fer TP5 2016-2017 LRSMbayaPas encore d'évaluation
- Vibration SITEDocument49 pagesVibration SITEBoutouil HassanPas encore d'évaluation
- Séquence 07Document8 pagesSéquence 07Alou DIARRAPas encore d'évaluation
- 23 GMéc Fabrication Méc ProductiqueDocument76 pages23 GMéc Fabrication Méc Productiquearslane mustaphaPas encore d'évaluation
- CoursDocument74 pagesCoursClory KanyamunezaPas encore d'évaluation
- MemoireDocument17 pagesMemoirejokPas encore d'évaluation
- Présentation DéformationDocument18 pagesPrésentation DéformationEskander DahriPas encore d'évaluation
- 2 Eme Expose Groupe IDocument69 pages2 Eme Expose Groupe IMahamadou Makan DiakitéPas encore d'évaluation
- MMC Rji 10Document6 pagesMMC Rji 10Mohcine El harch100% (1)
- Chapitre - 04 - Relation Contraintes Déformations Et Loi de ComportementDocument18 pagesChapitre - 04 - Relation Contraintes Déformations Et Loi de ComportementYounes DahPas encore d'évaluation
- Serie Oscillations MecaniquesDocument8 pagesSerie Oscillations Mecaniquesamadou ndoyePas encore d'évaluation