Vous aimerez peut-être aussi
- Transmissions de Puissance Hydrostatiques: 1 - GénéralitésDocument9 pagesTransmissions de Puissance Hydrostatiques: 1 - GénéralitésNassim RabaouiPas encore d'évaluation
- Hydraulique - ProportionnelleDocument12 pagesHydraulique - Proportionnellejasim hamadPas encore d'évaluation
- Hydraulique ProportionnelleDocument7 pagesHydraulique ProportionnelleIlyassBahaaPas encore d'évaluation
- Variateur de VitesseDocument31 pagesVariateur de VitesseReda NariPas encore d'évaluation
- Amplificateurs Mli-34Document10 pagesAmplificateurs Mli-34tacot-scribdPas encore d'évaluation
- Actionneurs en RCO: Guide de L'utilisateur DT-C003Document20 pagesActionneurs en RCO: Guide de L'utilisateur DT-C003ESOUBE CollinsPas encore d'évaluation
- Chapitre 3 - 1Document38 pagesChapitre 3 - 1Ahmed KhalilPas encore d'évaluation
- MicroCentrale HydrauliqueDocument9 pagesMicroCentrale HydrauliquearnoldPas encore d'évaluation
- Variateurs de Vitesse ElectroniquesDocument8 pagesVariateurs de Vitesse ElectroniquesWalid AbidPas encore d'évaluation
- Cours CMEDocument39 pagesCours CMEHaidra HaidraPas encore d'évaluation
- N4508 SQK34 FR PDFDocument4 pagesN4508 SQK34 FR PDFSoufiane FelmerPas encore d'évaluation
- IntroductionDocument34 pagesIntroductionAhmed KhalilPas encore d'évaluation
- 17-18 3m6040 - FR - 72dpiDocument2 pages17-18 3m6040 - FR - 72dpiAssia BourtiPas encore d'évaluation
- Compte Rendu ACM tp2Document10 pagesCompte Rendu ACM tp2Lounes AzizenPas encore d'évaluation
- Asservissement HydrauliqueDocument7 pagesAsservissement HydrauliqueCi TarekPas encore d'évaluation
- Chapitre II-Généralités Sur Les Démarreurs Et Les Variateurs de VitesseDocument18 pagesChapitre II-Généralités Sur Les Démarreurs Et Les Variateurs de VitesseMehdi Yahi100% (1)
- Huy HouyDocument25 pagesHuy Houyomar haddouchePas encore d'évaluation
- Modulation D EnergieDocument7 pagesModulation D EnergieAurelien Christ L'angePas encore d'évaluation
- 03 Constitutuion Generale Des CircuitsDocument6 pages03 Constitutuion Generale Des Circuitsعجائب الدنياPas encore d'évaluation
- Proportionaltechnik FRDocument20 pagesProportionaltechnik FRWassim DjouadiPas encore d'évaluation
- Altivar 71Document160 pagesAltivar 71Eric Morales GomezPas encore d'évaluation
- Gradateur Monophasé Et TriphaséDocument6 pagesGradateur Monophasé Et TriphaséAurelien Christ L'angePas encore d'évaluation
- Méthode de Spécification D'un Actionneur de Positionnement Linéaire Sur La Base D'une Machine BLDC Et D'une Transmission de PuissanceDocument6 pagesMéthode de Spécification D'un Actionneur de Positionnement Linéaire Sur La Base D'une Machine BLDC Et D'une Transmission de Puissancekaka kaladzePas encore d'évaluation
- Principe de Fonctionnement D'un Variateur de Vitesse PDFDocument30 pagesPrincipe de Fonctionnement D'un Variateur de Vitesse PDFChaouki Abdallah86% (7)
- Les Balances HydrauliquesDocument16 pagesLes Balances HydrauliquesYassine AallalouPas encore d'évaluation
- Command Machin ElectrDocument28 pagesCommand Machin ElectrAhmed KramdiPas encore d'évaluation
- TEST Régulation IndustrielleDocument3 pagesTEST Régulation IndustrielleLeberger KINDZONZI100% (1)
- MicroCentrale HydrauliqueDocument9 pagesMicroCentrale HydrauliqueDhikrane NafaaPas encore d'évaluation
- Statisme Pour Les Générateurs HydroélectriquesDocument16 pagesStatisme Pour Les Générateurs HydroélectriquesOualid LamraouiPas encore d'évaluation
- Relais de Mesure Et ControleDocument69 pagesRelais de Mesure Et ControleAbdoulPas encore d'évaluation
- Commande Variation de Vitesse Machine AsynchroneDocument64 pagesCommande Variation de Vitesse Machine AsynchroneOliver TwistePas encore d'évaluation
- Partie Operative Hydraulique Industrielle-Partie1Document39 pagesPartie Operative Hydraulique Industrielle-Partie1Bigue SowPas encore d'évaluation
- L3 GIM - TD 7 Hydraulique ProportionnelleDocument4 pagesL3 GIM - TD 7 Hydraulique ProportionnelleAhmed KhalilPas encore d'évaluation
- Rapport Du PfeDocument17 pagesRapport Du Pfejonssteve55Pas encore d'évaluation
- Chaine D'action ÉlectriqueDocument34 pagesChaine D'action ÉlectriqueBodelvi KayiPas encore d'évaluation
- Distribuer-Commande Par Modulation D'énergieDocument4 pagesDistribuer-Commande Par Modulation D'énergieBALLOUK Soufiane100% (1)
- Les OnduleursDocument65 pagesLes Onduleurssadok kerkeni100% (1)
- Convertisseurs de LElectronique de PuissDocument33 pagesConvertisseurs de LElectronique de Puissfarid saadPas encore d'évaluation
- Chapitre 4Document6 pagesChapitre 4Ãhmēd MędPas encore d'évaluation
- Mémoire Finale (Chapitre2)Document28 pagesMémoire Finale (Chapitre2)Âÿâčhê ÎsmâïlPas encore d'évaluation
- Cours - Hydraulique - 10-REGLAGE VITESSEDocument2 pagesCours - Hydraulique - 10-REGLAGE VITESSE46pmgrpnzfPas encore d'évaluation
- Documentos REDUCIDO VEGA-FRANCES 1b11e43fDocument20 pagesDocumentos REDUCIDO VEGA-FRANCES 1b11e43fv.moricet.abhPas encore d'évaluation
- Notice Jeulin 282006 FR b46cDocument12 pagesNotice Jeulin 282006 FR b46cBarthélemy HoubenPas encore d'évaluation
- C60 Schematisation HydrauliqueDocument6 pagesC60 Schematisation HydrauliqueKoukou AmkoukouPas encore d'évaluation
- Manuel Esd5500ece VR PDFDocument8 pagesManuel Esd5500ece VR PDFRached DouahchuaPas encore d'évaluation
- Variateurs de Vitesse 201106Document17 pagesVariateurs de Vitesse 201106Bhl ZarroukPas encore d'évaluation
- Commande ElectriqueDocument10 pagesCommande Electriqueadamatheist-1830Pas encore d'évaluation
- FXJ 8bDocument12 pagesFXJ 8bjeanPas encore d'évaluation
- Catalogue Relais Zelio ControlDocument73 pagesCatalogue Relais Zelio Controlmichael.meryPas encore d'évaluation
- Régulateur de Tension Automatique: Installation Et MaintenanceDocument16 pagesRégulateur de Tension Automatique: Installation Et MaintenanceLebongoPas encore d'évaluation
- 9305 20-80kVA Users and Installation Manual 1015543D FR PDFDocument40 pages9305 20-80kVA Users and Installation Manual 1015543D FR PDFpopaminoPas encore d'évaluation
- Etude Du Changeur de Prise en ChargeDocument9 pagesEtude Du Changeur de Prise en ChargeFrancis kouamé yao kanPas encore d'évaluation
- Aides TP1 HydrauliqueDocument28 pagesAides TP1 HydrauliqueBebana Mohamed LeminPas encore d'évaluation
- Les Convertisseurs de PuissanceDocument11 pagesLes Convertisseurs de PuissanceAntoine TETEVIPas encore d'évaluation
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- Windvane Report: Régulateurs d'allure, un voyage à travers le tempsD'EverandWindvane Report: Régulateurs d'allure, un voyage à travers le tempsPas encore d'évaluation
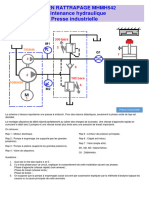
- Examen Rattrapage MHMH542 2021Document2 pagesExamen Rattrapage MHMH542 2021Ahmed KhalilPas encore d'évaluation
- MHMH542 (Complet)Document67 pagesMHMH542 (Complet)Ahmed KhalilPas encore d'évaluation
- DS MHMH542 Semaine 15Document2 pagesDS MHMH542 Semaine 15Ahmed KhalilPas encore d'évaluation
- Guide Capacite3Document80 pagesGuide Capacite3Ahmed KhalilPas encore d'évaluation
- Mini Projet RDM6Document10 pagesMini Projet RDM6kamalPas encore d'évaluation
- IntroductionDocument34 pagesIntroductionAhmed KhalilPas encore d'évaluation
- Cours rdm1Document18 pagesCours rdm1Mll RaghebPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap6Document15 pagesCours RDM-Khemili 2023-Chap6Ahmed KhalilPas encore d'évaluation
- RDM Khemili 2021 Chap2 1Document33 pagesRDM Khemili 2021 Chap2 1Ahmed KhalilPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap2-2Document24 pagesCours RDM-Khemili 2023-Chap2-2Ahmed KhalilPas encore d'évaluation
- Cours RDM Khemili 2019 Chap5Document12 pagesCours RDM Khemili 2019 Chap5Abir BøukërPas encore d'évaluation
- Cours RDM-Khemili 2020-Chap1Document14 pagesCours RDM-Khemili 2020-Chap1Rossiny NganiPas encore d'évaluation
- Cours RDM-Khemili 2023-Chap6Document15 pagesCours RDM-Khemili 2023-Chap6Ahmed KhalilPas encore d'évaluation
- CCNA 02 Introduction À l'IOSDocument138 pagesCCNA 02 Introduction À l'IOSyikhlefPas encore d'évaluation
- 0-Rappel Langage SQLDocument4 pages0-Rappel Langage SQLaminehosnyPas encore d'évaluation
- MathématiquesDocument393 pagesMathématiquesSaido Medjout100% (1)
- Ifr AttDocument9 pagesIfr AttpatrouilledeafrancePas encore d'évaluation
- PLE CoursDocument95 pagesPLE CoursFranck-Olivier KassouPas encore d'évaluation
- SALOMÉ Test Management FrameworkDocument101 pagesSALOMÉ Test Management FrameworkPharell William BaldorPas encore d'évaluation
- Beer - Méthode de Clarinette (1891)Document60 pagesBeer - Méthode de Clarinette (1891)fabri21Pas encore d'évaluation
- Techniques de ClimatisationDocument27 pagesTechniques de ClimatisationMohamud Lhaf100% (1)
- Controle 1 - 4 S1 PC 1bac FRDocument3 pagesControle 1 - 4 S1 PC 1bac FRbrinimed06gmail.comPas encore d'évaluation
- LC 22-001Document7 pagesLC 22-001Simon Houde100% (2)
- Favre-Bonvin, Arpin, Brevard - 1976 - Structure de La Mycosporine (P310) PDFDocument9 pagesFavre-Bonvin, Arpin, Brevard - 1976 - Structure de La Mycosporine (P310) PDFPriscila TorresPas encore d'évaluation
- NPS - VPN Sous Windows2012 ServerDocument19 pagesNPS - VPN Sous Windows2012 ServerAKUEPas encore d'évaluation
- TP BDV 2016Document17 pagesTP BDV 2016Khabtane AbdelhamidPas encore d'évaluation
- ParetoDocument13 pagesParetoIkram El GhazouaniPas encore d'évaluation
- Alimentations StatiquesDocument16 pagesAlimentations StatiquesKdr Khair-Eddine100% (1)
- QCM 5Document2 pagesQCM 5HAPMRIPas encore d'évaluation
- Top Ten 50Document35 pagesTop Ten 50Beppe SorboPas encore d'évaluation
- Crabol XXIV-3Document2 pagesCrabol XXIV-3Pham Van DuongPas encore d'évaluation
- TD1 CorDocument9 pagesTD1 Coramine jodar100% (1)
- TP E P RedresseurDocument5 pagesTP E P RedresseurRafik BouhennachePas encore d'évaluation
- TD N°2 Maths 3emeDocument5 pagesTD N°2 Maths 3emebilly kanaPas encore d'évaluation
- Formulaire SUP SuitesDocument2 pagesFormulaire SUP Suiteshala shooowPas encore d'évaluation
- Macro ImportDocument29 pagesMacro ImportKamil ChamPas encore d'évaluation
- Remerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonDocument42 pagesRemerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonOMAE01Pas encore d'évaluation
- Examen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Document4 pagesExamen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Chaima BellatPas encore d'évaluation
- TP 2 InstrumentationDocument6 pagesTP 2 Instrumentationrami kafiPas encore d'évaluation
- Travaux Dirigés - TD - ArbresDocument2 pagesTravaux Dirigés - TD - Arbresلا إلٰه إلّا اللهPas encore d'évaluation
- ADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jDocument1 pageADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jAlioune Badara Ibn Abu Talib DiènePas encore d'évaluation
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
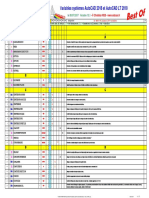
- Variables Systemes AutoCAD 2Mxx-BEST of VARIABLESDocument7 pagesVariables Systemes AutoCAD 2Mxx-BEST of VARIABLESazePas encore d'évaluation