Vous aimerez peut-être aussi
- Didacticiel Papier - Sphinx Iq 2 PDFDocument442 pagesDidacticiel Papier - Sphinx Iq 2 PDFAthenaDona100% (1)
- Td2 AutomatiqueDocument30 pagesTd2 AutomatiqueCharaf LeoPas encore d'évaluation
- ControleDAC2019 2020Document8 pagesControleDAC2019 2020Nazim Mahroug0% (1)
- TD PS 2020 2Document2 pagesTD PS 2020 2mike likePas encore d'évaluation
- Synchronisation CorrigeDocument16 pagesSynchronisation Corrigeyasser harathPas encore d'évaluation
- CH5 EXE SynchronisationCorrigeDocument18 pagesCH5 EXE SynchronisationCorrigeKo KitaPas encore d'évaluation
- TD Synchronisation CorrigéDocument9 pagesTD Synchronisation Corrigésafe selmiPas encore d'évaluation
- TD02 2021 Parie 1Document32 pagesTD02 2021 Parie 1fatima100% (1)
- TD1 Gi1Document2 pagesTD1 Gi1Hamza Mhal100% (1)
- Examen Corrigé Système D'exploitation, Univ Bouira 2018Document3 pagesExamen Corrigé Système D'exploitation, Univ Bouira 2018ilies ould menouer50% (2)
- TD Regul 2005Document21 pagesTD Regul 2005moipop100% (1)
- Correctionsynthese 2Document8 pagesCorrectionsynthese 2Amal LaadhariPas encore d'évaluation
- Master I: Équipement de L'habitat: Fiche de TD N°3Document4 pagesMaster I: Équipement de L'habitat: Fiche de TD N°3Meziane YkhlefPas encore d'évaluation
- SE Série5Document3 pagesSE Série5kawtherchPas encore d'évaluation
- Corr S1 Ex I Ex II Ex III Ex IV MTI S2Document2 pagesCorr S1 Ex I Ex II Ex III Ex IV MTI S2ezziki lailaPas encore d'évaluation
- Determinants - Complements Sur Les Matrices - Systemes D'Equations LineairesDocument38 pagesDeterminants - Complements Sur Les Matrices - Systemes D'Equations Lineairesebenezer n'goranPas encore d'évaluation
- TdautoDocument16 pagesTdautoإدريس باباعربيPas encore d'évaluation
- Algorithmique Et Structures de Données 2019Document6 pagesAlgorithmique Et Structures de Données 2019Song Tae HaPas encore d'évaluation
- Examenautomatique2018 19Document11 pagesExamenautomatique2018 19FahdPas encore d'évaluation
- Corr - Optimisation Sans ContraintesDocument3 pagesCorr - Optimisation Sans ContraintesRacha DjaghloulPas encore d'évaluation
- IPT MPSI DS4 CorrigeDocument12 pagesIPT MPSI DS4 CorrigeSwayziiPas encore d'évaluation
- TD3-synchronisation (Correction)Document3 pagesTD3-synchronisation (Correction)fatma tlibaPas encore d'évaluation
- TD2 SALC GabourDocument4 pagesTD2 SALC Gabourachelirayane7Pas encore d'évaluation
- Corrigé - SynchronisationDocument15 pagesCorrigé - Synchronisationmeriem bahaPas encore d'évaluation
- TdmlapDocument4 pagesTdmlapAdam Ahmat AbakarPas encore d'évaluation
- Corrigé - Série SupplémentaireDocument1 pageCorrigé - Série Supplémentairenounouha.nkPas encore d'évaluation
- TD TnsDocument17 pagesTD TnsAnne PotsPas encore d'évaluation
- TD3 Synchronisation SemaphoresDocument3 pagesTD3 Synchronisation SemaphoresJamal Syh100% (1)
- TD Tns - PsDocument17 pagesTD Tns - Psabdoul aziz100% (1)
- TD1 CorrigéDocument3 pagesTD1 Corrigémike likePas encore d'évaluation
- Correction Du TD N°3Document8 pagesCorrection Du TD N°3alinPas encore d'évaluation
- Asservissement Cour 2Document5 pagesAsservissement Cour 2drizihamzaPas encore d'évaluation
- Controle Continu1&2Document5 pagesControle Continu1&2Edouard Mvogo BileguePas encore d'évaluation
- Comnum 6Document17 pagesComnum 6Karim KrimouPas encore d'évaluation
- TD4 LaplaceDocument8 pagesTD4 LaplaceŒū Ssa MēPas encore d'évaluation
- All TPDocument125 pagesAll TPOMAR RAHALIPas encore d'évaluation
- Examen Final SLC CorrigéDocument3 pagesExamen Final SLC CorrigéNadir SaoudiPas encore d'évaluation
- Inspection D'académie de MatamDocument3 pagesInspection D'académie de MatamMamadouwane DoumbouyaPas encore d'évaluation
- I-But de La ManipulationDocument7 pagesI-But de La ManipulationRedwane KhajrouPas encore d'évaluation
- Cours de Math Ing-79Document1 pageCours de Math Ing-79Hafsa LamrabatPas encore d'évaluation
- MEEA APhaseDocument3 pagesMEEA APhaseabderrahm harunPas encore d'évaluation
- Corrige 19Document3 pagesCorrige 19NATE KOFFI JOHNATHAN YANNPas encore d'évaluation
- Transforme de LaplaceDocument20 pagesTransforme de Laplaceahcene2010Pas encore d'évaluation
- TD1 Régulation Industrielle (1) - 230917 - 211035Document2 pagesTD1 Régulation Industrielle (1) - 230917 - 211035salah fcbPas encore d'évaluation
- Exam1920 CorrDocument6 pagesExam1920 CorrObeb FkiriPas encore d'évaluation
- Thermodynamique II TD 07Document6 pagesThermodynamique II TD 07Ayyoub DAHBIPas encore d'évaluation
- 1-Thermodynamique II Serie N°1 SMP 3 2013-2014 PDFDocument6 pages1-Thermodynamique II Serie N°1 SMP 3 2013-2014 PDFanon_475250985Pas encore d'évaluation
- 1-Thermodynamique II Serie N°1 SMP 3 2013-2014Document6 pages1-Thermodynamique II Serie N°1 SMP 3 2013-2014Hamza RappounPas encore d'évaluation
- 1-Thermodynamique II Serie N°1 SMP 3 2013-2014Document6 pages1-Thermodynamique II Serie N°1 SMP 3 2013-2014الحمد للهPas encore d'évaluation
- TP3-Simulation PSK-QAM Winqsim CorrectionDocument16 pagesTP3-Simulation PSK-QAM Winqsim CorrectionJessi autisolPas encore d'évaluation
- AlgooDocument6 pagesAlgooifaoui shathaPas encore d'évaluation
- Exemples TpsDocument20 pagesExemples TpsSarra BÉCHIRIPas encore d'évaluation
- Gradateurs MonophaséDocument6 pagesGradateurs MonophaséSmati DjamelPas encore d'évaluation
- Corr Cours 5 PDFDocument4 pagesCorr Cours 5 PDFhenryPas encore d'évaluation
- 2021-2022 2a Appromecaphy TPDocument3 pages2021-2022 2a Appromecaphy TPbergerPas encore d'évaluation
- TD Automatique GMII 20correction09JUINdDocument14 pagesTD Automatique GMII 20correction09JUINdproto niomPas encore d'évaluation
- DL 8Document4 pagesDL 8Lk7lPas encore d'évaluation
- GrueDocument7 pagesGrueEs.sabery IsmailPas encore d'évaluation
- InfoDocument4 pagesInfoHaithem MouassaPas encore d'évaluation
- 2020 Emd Syst AsservisDocument2 pages2020 Emd Syst AsservisNaĴŵâ MìNa NosŢaPas encore d'évaluation
- Poly JavaDocument176 pagesPoly JavaLeonzoConstantiniPas encore d'évaluation
- Mémoire de Master-YF-Post Soutenance-20200610Document70 pagesMémoire de Master-YF-Post Soutenance-20200610Yacinthe FAYE100% (1)
- Corrige TD 8 1920 2Document5 pagesCorrige TD 8 1920 2friends diaryPas encore d'évaluation
- Maths X PSI 1998 (Enoncé)Document7 pagesMaths X PSI 1998 (Enoncé)LM --Pas encore d'évaluation
- TD Regime de Neutre TTDocument4 pagesTD Regime de Neutre TTOlivier FLOHRPas encore d'évaluation
- TP Conduction CompletDocument10 pagesTP Conduction Complethamza layachi75% (4)
- TF06 P09 MedianDocument4 pagesTF06 P09 MedianAyt Moha BrahimPas encore d'évaluation
- ChapitreDocument8 pagesChapitreAchour IfrekPas encore d'évaluation
- 04 JSFT-echangeur-2012 GRESPI Fohanno PDFDocument21 pages04 JSFT-echangeur-2012 GRESPI Fohanno PDFzermiPas encore d'évaluation
- DS SDM S1 2015 CorrectionDocument2 pagesDS SDM S1 2015 CorrectiondsiscnPas encore d'évaluation
- DJE4394Document119 pagesDJE4394danPas encore d'évaluation
- UE Cybersécurité-Initiation Metasploit v0.3Document17 pagesUE Cybersécurité-Initiation Metasploit v0.3didierPas encore d'évaluation
- FeuilletageDocument25 pagesFeuilletageLē JøkērPas encore d'évaluation
- Rapport Optimisation Sur MatlabDocument13 pagesRapport Optimisation Sur MatlabLino YETONGNONPas encore d'évaluation
- Sujet Bac 2023 Guinee Niger MathsDocument5 pagesSujet Bac 2023 Guinee Niger Mathsmr.4chiffrePas encore d'évaluation
- Exercices Chapitre 3 FractionsDocument3 pagesExercices Chapitre 3 FractionsTony GRACAPas encore d'évaluation
- PdM3 Guide Corrige Vrac Repros C4Document2 pagesPdM3 Guide Corrige Vrac Repros C4Eva BteichPas encore d'évaluation
- TP 1Document1 pageTP 1djennati100% (1)
- Algèbre 1 V. Def 2017-2018Document141 pagesAlgèbre 1 V. Def 2017-2018Alexis Rosuel100% (1)
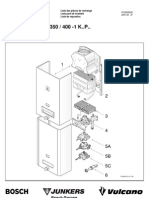
- W - 250 - 275 - 325 - 350 - 400 - 1 K..p..Document28 pagesW - 250 - 275 - 325 - 350 - 400 - 1 K..p..joviadoPas encore d'évaluation
- Examen de Fin de Formation 2008 Tsri Pratique Variante 9Document5 pagesExamen de Fin de Formation 2008 Tsri Pratique Variante 9FatimaLEPas encore d'évaluation
- Année Prépa Electricité, Deuxième PartieDocument221 pagesAnnée Prépa Electricité, Deuxième PartieAbdelkader Faklani DouPas encore d'évaluation
- GPM Tle C 3e Edition.Document258 pagesGPM Tle C 3e Edition.Pierrot Jules AMOUSSOU100% (2)
- Api RestDocument8 pagesApi RestfogoPas encore d'évaluation
- GISEMENTDocument4 pagesGISEMENTTouré AbdoulPas encore d'évaluation
- TD6 PhysiqueDocument4 pagesTD6 PhysiqueEric DeumoPas encore d'évaluation
- Unite 71 Manuel OpératoireDocument110 pagesUnite 71 Manuel OpératoireAbdessalem Bougoffa50% (2)
- Incendie: I-Prévention Et ProtectionDocument4 pagesIncendie: I-Prévention Et Protectionraid bazizPas encore d'évaluation
- ANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020Document3 pagesANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020younes amaraPas encore d'évaluation