Vous aimerez peut-être aussi
- TD N°3 Réponse Temporelle Des Systèmes Linéaires: Exercice 1Document7 pagesTD N°3 Réponse Temporelle Des Systèmes Linéaires: Exercice 1Nasro SiotousPas encore d'évaluation
- COURS RegulationDocument95 pagesCOURS Regulationyasser ChemssoPas encore d'évaluation
- ExamSys1 LMD 2012 2013 Epreuve CorrigeDocument3 pagesExamSys1 LMD 2012 2013 Epreuve CorrigeWich RiverPas encore d'évaluation
- ExamSys1 LMD 2014 2015 RattrapageCorDocument3 pagesExamSys1 LMD 2014 2015 RattrapageCorSira NdiayePas encore d'évaluation
- ExamSys1 LMD 2011 2012 EpreuveCorrigeDocument4 pagesExamSys1 LMD 2011 2012 EpreuveCorrigeIdrissa Kouyaté100% (1)
- Corrige Exam Reseau 2013 Ses1 v1 PDFDocument3 pagesCorrige Exam Reseau 2013 Ses1 v1 PDFJoussine67% (3)
- ExamSys1 LMD 2009 2010 EpreuveCorDocument2 pagesExamSys1 LMD 2009 2010 EpreuveCorSira NdiayePas encore d'évaluation
- Bugs Bunny Papercraft 70cm Con LineasDocument20 pagesBugs Bunny Papercraft 70cm Con LineasdavidseliasPas encore d'évaluation
- TP 1 Fonction de Transfert Et Reponses Temporelles Des Systemes LinéairesDocument4 pagesTP 1 Fonction de Transfert Et Reponses Temporelles Des Systemes LinéairesRafik BouhennachePas encore d'évaluation
- Compte Rendu Asservissement 1 (Enregistré Automatiquement)Document19 pagesCompte Rendu Asservissement 1 (Enregistré Automatiquement)Nasri RimehPas encore d'évaluation
- Fiche Savoir 01 Carte Arduino 20180301 PDFDocument2 pagesFiche Savoir 01 Carte Arduino 20180301 PDFJean Claude KonanPas encore d'évaluation
- Tdtme6 CorDocument23 pagesTdtme6 CorChedy SaklyPas encore d'évaluation
- Cortd4 PDFDocument3 pagesCortd4 PDFMouhcen El-kahiriPas encore d'évaluation
- ExamSys1 LMD 2008 2009 EpreuveCorDocument3 pagesExamSys1 LMD 2008 2009 EpreuveCorSira NdiayePas encore d'évaluation
- Math 2AS2Document2 pagesMath 2AS2aziz loudPas encore d'évaluation
- Note de Calcul ESACDocument23 pagesNote de Calcul ESACMohamedChekibSkhiriPas encore d'évaluation
- TD 2Document2 pagesTD 2darknightPas encore d'évaluation
- SecuriteDocument186 pagesSecuritehaffoudhinour6755Pas encore d'évaluation
- Fiche Outil Mesurer Une Tension 1Document2 pagesFiche Outil Mesurer Une Tension 1Amour KoffiPas encore d'évaluation
- TP Ver2Document2 pagesTP Ver2Fast StorePas encore d'évaluation
- Pressure MuseDocument5 pagesPressure Museeric greenPas encore d'évaluation
- TD 04Document3 pagesTD 04Rafik BoumiPas encore d'évaluation
- Bom 3 AzeDocument16 pagesBom 3 Azeabdelhadi amalPas encore d'évaluation
- %amanhecerDocument1 page%amanhecerAlison RodriguesPas encore d'évaluation
- Plan de Masse FinalDocument1 pagePlan de Masse FinaljonathanbanksmwayumbaPas encore d'évaluation
- Trasero Jeans Masculino (34-42)Document1 pageTrasero Jeans Masculino (34-42)Huber Jhonny MuñozPas encore d'évaluation
- RAPPORT TP PICos18 G6 LASRI OULAASRIDocument28 pagesRAPPORT TP PICos18 G6 LASRI OULAASRIYassine OULAASRIPas encore d'évaluation
- 300M SETUP DIAG-SRGinfotechDocument3 pages300M SETUP DIAG-SRGinfotechTran MinhPas encore d'évaluation
- Topo2 PDFDocument50 pagesTopo2 PDFTOURE100% (1)
- Las 4 Estaciones ViolaDocument3 pagesLas 4 Estaciones ViolaLAURA VANESSA SANCHEZ CORTESPas encore d'évaluation
- AbecedarioDocument26 pagesAbecedarioAlejandro Chivalán TecunPas encore d'évaluation
- Sweet Child of Mine Bass TabDocument1 pageSweet Child of Mine Bass TabFrançois LarouchePas encore d'évaluation
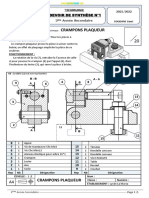
- Crampons Plaqueur: Devoir de Synthèse N°1Document6 pagesCrampons Plaqueur: Devoir de Synthèse N°1Nadia SahliPas encore d'évaluation
- (AnaSLCI) (CO) Analyse Des Performances Des SLCIDocument28 pages(AnaSLCI) (CO) Analyse Des Performances Des SLCIPatrick Steve SimoPas encore d'évaluation
- TP 1 AservisDocument27 pagesTP 1 AservisKader PhénixPas encore d'évaluation
- 510M SETUP DIAGRAM-SRGinfotechDocument3 pages510M SETUP DIAGRAM-SRGinfotechTran MinhPas encore d'évaluation
- A41 Dec2005 CorrectionDocument3 pagesA41 Dec2005 Correctionkaidi chaimaaPas encore d'évaluation
- TP Compteurs IntegresDocument3 pagesTP Compteurs IntegresTotoPas encore d'évaluation
- 爵士吉他练习乐句Document2 pages爵士吉他练习乐句周元政Pas encore d'évaluation
- Sys1 LMD 2008 2Document2 pagesSys1 LMD 2008 2fokamPas encore d'évaluation
- 02 Plan Du R+1 - Après TravauxDocument1 page02 Plan Du R+1 - Après Travauxarol.batinorPas encore d'évaluation
- POUTREDocument4 pagesPOUTREgodjo jiovaniPas encore d'évaluation
- PP1Document1 pagePP1godjo jiovaniPas encore d'évaluation
- Arduino LCDDocument3 pagesArduino LCDhassanPas encore d'évaluation
- Phoenix Contact 2769873 FRDocument3 pagesPhoenix Contact 2769873 FRMorad LaaroussiPas encore d'évaluation
- CR Coo Lakah DerradjiDocument14 pagesCR Coo Lakah DerradjiPascal BerthouPas encore d'évaluation
- Chapitre 1Document16 pagesChapitre 1APas encore d'évaluation
- Figure A NDocument1 pageFigure A NKhattou MouadPas encore d'évaluation
- La Vitesse en Régime PermanentDocument1 pageLa Vitesse en Régime PermanentNidhal CherratPas encore d'évaluation
- Activités Supplémentaires: Les Ensembles de NombresDocument2 pagesActivités Supplémentaires: Les Ensembles de NombreskevorkwahradianPas encore d'évaluation
- Examen1 Système Dexploitation 2Document7 pagesExamen1 Système Dexploitation 2nourkezranePas encore d'évaluation
- Notice D'exploitation CMSI 8000Document34 pagesNotice D'exploitation CMSI 8000efslougPas encore d'évaluation
- Manuel Utilisateur Comparateur XP56-XP505Document38 pagesManuel Utilisateur Comparateur XP56-XP505Sofiane GHEFFARPas encore d'évaluation
- Methode ABCDocument8 pagesMethode ABCYass Maro100% (2)
- EMD SE 2021 SolutionDocument4 pagesEMD SE 2021 SolutionfatimaPas encore d'évaluation
- Suppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurD'EverandSuppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurPas encore d'évaluation
- CHAP 3 Régulation IndustrielleDocument15 pagesCHAP 3 Régulation IndustrielleNidal BestPas encore d'évaluation
- 5 Stabilite Des Systemes AsservisDocument9 pages5 Stabilite Des Systemes AsservisbouchPas encore d'évaluation
- Examaster 20Document3 pagesExamaster 20sdik aichaPas encore d'évaluation
- TP Rép Tem 2eme OrdreDocument7 pagesTP Rép Tem 2eme OrdreMeriem AIT OUMEGHARPas encore d'évaluation
- Exercices2009 2010Document24 pagesExercices2009 2010Miss AmericanaPas encore d'évaluation
- GELE2511 Chapitre8Document43 pagesGELE2511 Chapitre8Salah BerraPas encore d'évaluation
- Tp1 Systemes Echantillonnes Matlab SimulinkDocument8 pagesTp1 Systemes Echantillonnes Matlab Simulinkdan0% (1)
- Commandes Industrielles Avancees PDFDocument26 pagesCommandes Industrielles Avancees PDFfahdozPas encore d'évaluation
- Mpsi c2 Chap3 Fonction de TransfertDocument8 pagesMpsi c2 Chap3 Fonction de TransfertkamalPas encore d'évaluation
- TP Auto S2Document14 pagesTP Auto S2ibrazizi2000Pas encore d'évaluation
- Polycope-Serie-TD - Septembre-2021-2022 (2OK)Document4 pagesPolycope-Serie-TD - Septembre-2021-2022 (2OK)Diotimos AlkinosPas encore d'évaluation
- TD 1Document1 pageTD 1Mohamed Aly SowPas encore d'évaluation
- Examen 1 AutomatiqueDocument10 pagesExamen 1 Automatiquelina ismailPas encore d'évaluation
- Exercice de Revision BisDocument2 pagesExercice de Revision BisMohamed SalamaPas encore d'évaluation
- Tableau Laplace+TDDocument3 pagesTableau Laplace+TDKawthar Badissy100% (2)
- Cours Asservissements PDFDocument67 pagesCours Asservissements PDFMohamed OubellaPas encore d'évaluation
- TD N°2 Commande Des Systèmes Linéaires Continus M1Document3 pagesTD N°2 Commande Des Systèmes Linéaires Continus M1Mouad ES SoubaaiPas encore d'évaluation
- TD5 - Correction Des Systèmes Asservis ÉchantillonnésDocument8 pagesTD5 - Correction Des Systèmes Asservis ÉchantillonnésZakaria ZianePas encore d'évaluation
- Livre - TP Asserv - Master Et Licence - Aissi SalimDocument96 pagesLivre - TP Asserv - Master Et Licence - Aissi SalimZakaria Mourtadi100% (1)
- Systèmes de BaseDocument60 pagesSystèmes de Basemhawar bromancePas encore d'évaluation
- Cours Part I LPGEDocument10 pagesCours Part I LPGEABDERRAHMANE AOUSSAYPas encore d'évaluation
- Analyse temporelleDocument14 pagesAnalyse temporellehadjhahoum.abdelbassetPas encore d'évaluation
- Chapitre 2Document12 pagesChapitre 2anasPas encore d'évaluation
- TP 1 Ident ExprmlDocument10 pagesTP 1 Ident ExprmlIheb JallouzPas encore d'évaluation
- TP01 RégulationDocument10 pagesTP01 RégulationAhmed BoualiPas encore d'évaluation
- ChIV - Le Filtrage Numérique 22-23Document44 pagesChIV - Le Filtrage Numérique 22-23Houssam Eddine BENLOUNASSEPas encore d'évaluation
- Poly 2 TD Auto Sans CorrDocument19 pagesPoly 2 TD Auto Sans CorrYosra rhim YosraPas encore d'évaluation
- Chap 2Document10 pagesChap 2one piece to drawPas encore d'évaluation