Vous aimerez peut-être aussi
- TP1 Manip - Filtres LED SIIDocument12 pagesTP1 Manip - Filtres LED SIIMoussa ESSANHAJIPas encore d'évaluation
- Ds Filtre de Hartley 19 Nov 18 PDFDocument4 pagesDs Filtre de Hartley 19 Nov 18 PDFYassir Sadiq Elfilali80% (5)
- 01 SLCI FicheDocument2 pages01 SLCI FicheChrist NyakeyPas encore d'évaluation
- TP2 MSWDocument9 pagesTP2 MSWSamagassi SouleymanePas encore d'évaluation
- SLCI - Analyse FréquentielleDocument10 pagesSLCI - Analyse FréquentielleBah KhalilPas encore d'évaluation
- Integnum PDFDocument6 pagesIntegnum PDFEmmanuel ZorïchPas encore d'évaluation
- Universite Hassiba Benbouali Du Chlef Faculté de Technologie Département D'ElectrotchniqueDocument5 pagesUniversite Hassiba Benbouali Du Chlef Faculté de Technologie Département D'Electrotchniquechaimaagherbi5Pas encore d'évaluation
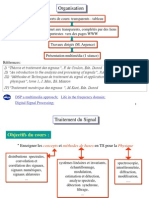
- Cours TS1Document135 pagesCours TS1reda100% (1)
- Traitement Du Signal Examen 05Document5 pagesTraitement Du Signal Examen 05Miss AmericanaPas encore d'évaluation
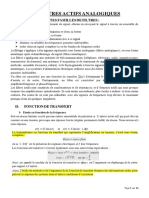
- Cours Esta Les Filtres Actifs AnalogiquesDocument14 pagesCours Esta Les Filtres Actifs AnalogiquesWilfried ZougmoréPas encore d'évaluation
- Physique mp1 PDFDocument173 pagesPhysique mp1 PDFyarzizPas encore d'évaluation
- RFWERFAWEFDocument18 pagesRFWERFAWEFCHOUKI REDAPas encore d'évaluation
- CP11 Analyse Harmonique D Un Signal P Riodique 2040-2041Document4 pagesCP11 Analyse Harmonique D Un Signal P Riodique 2040-2041nas el ghiouanPas encore d'évaluation
- Chapitre 5Document45 pagesChapitre 5Algerian AissaouiPas encore d'évaluation
- 2020 2021 TAS GECSI 1 Chapitre 3 Conv+Corré ProjectionDocument16 pages2020 2021 TAS GECSI 1 Chapitre 3 Conv+Corré ProjectionMounaim MatiniPas encore d'évaluation
- TDs Signal 2EEEA-2020-2021Document5 pagesTDs Signal 2EEEA-2020-2021Oubaida21 SnackPas encore d'évaluation
- Filtres&descripteurs SignauxDocument5 pagesFiltres&descripteurs SignauxFatine FatmiPas encore d'évaluation
- Analyse Exposé Sss PDFDocument14 pagesAnalyse Exposé Sss PDFKodjovi Adjété AMETADJIPas encore d'évaluation
- Transp Fourier O-LeyDocument20 pagesTransp Fourier O-LeyHamdi GdhamiPas encore d'évaluation
- Chapitre 2Document76 pagesChapitre 2salaheddinesabir76Pas encore d'évaluation
- Série TDDocument2 pagesSérie TDSamia FassouliPas encore d'évaluation
- Série 1 TD Traitement de SiganlDocument2 pagesSérie 1 TD Traitement de SiganlFatima Zohra ESSAKHAIRYPas encore d'évaluation
- CoursDocument39 pagesCoursOualidscribdPas encore d'évaluation
- Transp Fourier O-LeyDocument20 pagesTransp Fourier O-LeyMazama-Esso Moddoh OclooPas encore d'évaluation
- Analyse de FourierDocument7 pagesAnalyse de Fourierimane ElarouiPas encore d'évaluation
- TD08Document2 pagesTD08Jean DraculaPas encore d'évaluation
- ComNum 3Document26 pagesComNum 3Hadi FouaniPas encore d'évaluation
- Chap IIDocument24 pagesChap IIAyman LamzouriPas encore d'évaluation
- TD1: Signaux: Propriétés Élémentaires, Signaux D'energie FinieDocument2 pagesTD1: Signaux: Propriétés Élémentaires, Signaux D'energie Finieabdelgansonre706Pas encore d'évaluation
- Fonctions Électroniques Et Filtrage AnalogiqueDocument23 pagesFonctions Électroniques Et Filtrage AnalogiqueLatifa BarikPas encore d'évaluation
- Chap 1Document8 pagesChap 1docteurgynecoPas encore d'évaluation
- Traitement de signalDocument12 pagesTraitement de signalcmahdi204Pas encore d'évaluation
- TD 2 NON C Traitementdu Signal N3Document2 pagesTD 2 NON C Traitementdu Signal N3Ilyas Ilyas23Pas encore d'évaluation
- Traitement Du Signal ElevesDocument25 pagesTraitement Du Signal ElevesHassen AztecaPas encore d'évaluation
- TD 1Document8 pagesTD 1one piece to drawPas encore d'évaluation
- Poly TDs TNS Francais 2017 2018Document26 pagesPoly TDs TNS Francais 2017 2018Miloud MOULAY OMARPas encore d'évaluation
- AnalysedeFourier1 PDFDocument14 pagesAnalysedeFourier1 PDFMohamed AmineeoxPas encore d'évaluation
- Seriefourier PDFDocument18 pagesSeriefourier PDFZakaria ZikoPas encore d'évaluation
- Transformée de Fourier Discrète (TFD) : 1 Rappels ThéoriquesDocument11 pagesTransformée de Fourier Discrète (TFD) : 1 Rappels ThéoriquesSabrina BenabdessalemPas encore d'évaluation
- Réponse Fréquentielle Des Systèmes Linéaires-Chapitre 3Document26 pagesRéponse Fréquentielle Des Systèmes Linéaires-Chapitre 3Youness KacharPas encore d'évaluation
- Merged 20200611 002204.TextMarkDocument17 pagesMerged 20200611 002204.TextMarkSawat SiwarPas encore d'évaluation
- 21 PSIEClinrepDocument3 pages21 PSIEClinrepEl kamar-channelPas encore d'évaluation
- Exam1GII3 SIGNAUX&SYSTEMESDocument1 pageExam1GII3 SIGNAUX&SYSTEMESFabrice FotsoPas encore d'évaluation
- B - Transparent Cours Bruits 2013Document92 pagesB - Transparent Cours Bruits 2013chemaliPas encore d'évaluation
- Bode NyquistDocument14 pagesBode NyquistYasmine Ben AbdelkrimPas encore d'évaluation
- Chapitre11 - FiltrageDocument13 pagesChapitre11 - FiltrageMohammed TAOUSSIPas encore d'évaluation
- FiltreDocument9 pagesFiltreKhaola EssihiPas encore d'évaluation
- Transparent Cours Bruits 2013 Web LPPDocument91 pagesTransparent Cours Bruits 2013 Web LPPRonel Gotrand NguimezapPas encore d'évaluation
- CoursDocument146 pagesCoursDjibril Idé Alpha100% (1)
- TD N 4 - Electrocinétique, Décomposition D Un Signal Périodique en Série de Fourier Et Filtrage Linéaire A. ElectrocinétiqueDocument5 pagesTD N 4 - Electrocinétique, Décomposition D Un Signal Périodique en Série de Fourier Et Filtrage Linéaire A. Electrocinétiqueandreas smethPas encore d'évaluation
- Cours - Part1Document10 pagesCours - Part1Salah Eddine EL AbbadiPas encore d'évaluation
- Traitement Numérique Du Signal: Travaux Dirigés - L3 PIEDocument7 pagesTraitement Numérique Du Signal: Travaux Dirigés - L3 PIEjuniortass01Pas encore d'évaluation
- CC2 Tsres2Document2 pagesCC2 Tsres2Faucon FalconPas encore d'évaluation
- Presentation 1Document38 pagesPresentation 1Dougo SIDIBEPas encore d'évaluation
- Eval16011668854 - CopieDocument2 pagesEval16011668854 - CopieRegulationL3 USTHBPas encore d'évaluation
- Eval16011668854 - CopieDocument2 pagesEval16011668854 - CopieRegulationL3 USTHBPas encore d'évaluation
- TD5 FM VFDocument2 pagesTD5 FM VFAnas FarhaouiPas encore d'évaluation
- Ch2 - Série de Fourier - 084915Document14 pagesCh2 - Série de Fourier - 084915firas njehi100% (1)
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- E chmp2022Document4 pagesE chmp2022one piece to drawPas encore d'évaluation
- E3A PSI 2014 TelepheriqueVanoiseExpress SujetDocument44 pagesE3A PSI 2014 TelepheriqueVanoiseExpress Sujetone piece to drawPas encore d'évaluation
- X Ens MP 2018 Maths C SujetDocument6 pagesX Ens MP 2018 Maths C SujetAlice VillardièrePas encore d'évaluation
- PC PHYSIQUE MINES 2 2016.enonceDocument7 pagesPC PHYSIQUE MINES 2 2016.enonceChayma M'HPas encore d'évaluation
- TD 1Document8 pagesTD 1one piece to drawPas encore d'évaluation
- PB3 - Cor 3Document3 pagesPB3 - Cor 3one piece to drawPas encore d'évaluation
- PB3 - Cor 3Document3 pagesPB3 - Cor 3one piece to drawPas encore d'évaluation
- TD 1Document8 pagesTD 1one piece to drawPas encore d'évaluation
- DL1 24-SolDocument5 pagesDL1 24-Solone piece to drawPas encore d'évaluation
- SADIK Omar CPGE FES Corrigé du concours Mines ponts 2014: z i θ R cos θ+iR sinθ i α R cos θ i (θ+R sinθ) i α R cos θDocument6 pagesSADIK Omar CPGE FES Corrigé du concours Mines ponts 2014: z i θ R cos θ+iR sinθ i α R cos θ i (θ+R sinθ) i α R cos θyassinePas encore d'évaluation
- RéductionDocument102 pagesRéductionone piece to drawPas encore d'évaluation
- La Place de La Comptabilité Analytique de GestionDocument9 pagesLa Place de La Comptabilité Analytique de GestionNourredine SabriPas encore d'évaluation
- Rapport de StageDocument14 pagesRapport de StagesaidPas encore d'évaluation
- Le Management Et Le Controle de Gestion PPT VFDocument34 pagesLe Management Et Le Controle de Gestion PPT VFJihane YoussoufiPas encore d'évaluation
- Résumé de Géologie 2024Document2 pagesRésumé de Géologie 2024Kotbi MohamedPas encore d'évaluation
- IMECO CatalogueDocument31 pagesIMECO Catalogueasiyapcommercial1Pas encore d'évaluation
- Fondamentaux Communication D'entrepriseDocument10 pagesFondamentaux Communication D'entreprisefallPas encore d'évaluation
- Cours 04 Le Rationalisme Et Les Visionnaires Du 18eme Siècle PDFDocument57 pagesCours 04 Le Rationalisme Et Les Visionnaires Du 18eme Siècle PDFBen Aribe AymenPas encore d'évaluation
- Ligne Minière Est 27 06 18 VFDocument46 pagesLigne Minière Est 27 06 18 VFAbbas EulmiPas encore d'évaluation
- Facebook Mot de Passe Hack GratuitDocument2 pagesFacebook Mot de Passe Hack Gratuitlegalcategory245Pas encore d'évaluation
- Vinçotte Installation Domestique Electrique 2022 FRDocument40 pagesVinçotte Installation Domestique Electrique 2022 FRPetar PetrovPas encore d'évaluation
- L3 - Hydrogéologie - Cours - Chapitre 01Document21 pagesL3 - Hydrogéologie - Cours - Chapitre 01Yasmine Ouardia KARROUMPas encore d'évaluation
- Pages Choisie S 18800 B LoyDocument432 pagesPages Choisie S 18800 B LoyMathieu Victor100% (1)
- Cours D'économie de Production Niveau 5-1Document68 pagesCours D'économie de Production Niveau 5-1Leo Jospinho100% (1)
- CORRIGE MACRO L1 Sept 2005Document7 pagesCORRIGE MACRO L1 Sept 2005souad mhiriPas encore d'évaluation
- Bottero, Pierre - (La Quete D'ewilan-3) L'ile Du DestinDocument265 pagesBottero, Pierre - (La Quete D'ewilan-3) L'ile Du DestinNaheuPas encore d'évaluation
- Piece 2c - Agdez - PortailDocument80 pagesPiece 2c - Agdez - PortailMohammed DarroussiPas encore d'évaluation
- 05 SPEH ICE PartB 2015Document46 pages05 SPEH ICE PartB 2015Anas LahlouPas encore d'évaluation
- Lecture Facile Le Chauffeur Deinstein - 149298Document1 pageLecture Facile Le Chauffeur Deinstein - 149298Hajar EL ABBADIPas encore d'évaluation
- 2020 Concours Centrale Supélec Physique Chimie 1 TSI Corrige 3Document5 pages2020 Concours Centrale Supélec Physique Chimie 1 TSI Corrige 3mpofPas encore d'évaluation
- TCH 025 Ets Diagnostic Ptie 1 h08Document69 pagesTCH 025 Ets Diagnostic Ptie 1 h08Anonymous Zz5ljwwtPas encore d'évaluation
- Le Tourneur-Mécanicien Filetage Et Travaux Speciaux, E.sodanoDocument178 pagesLe Tourneur-Mécanicien Filetage Et Travaux Speciaux, E.sodanoaymenPas encore d'évaluation
- Etude de Cas - Cycle de Vente ClientDocument2 pagesEtude de Cas - Cycle de Vente ClientYOUNES JOUHARI100% (2)
- Pannes Et Depannage D'un GeDocument5 pagesPannes Et Depannage D'un GeYacoubaPas encore d'évaluation
- 203-Article Text-754-1-10-20200802Document18 pages203-Article Text-754-1-10-20200802Ahmed MardasPas encore d'évaluation
- Lecture Schema Electrique BepDocument4 pagesLecture Schema Electrique BepMBIA FIDELIN YVES100% (2)
- NF en 1992-1-1Document3 pagesNF en 1992-1-1DiengPas encore d'évaluation
- Livret Pédagogique EAD PHILOSOPHIE 2017-2018Document113 pagesLivret Pédagogique EAD PHILOSOPHIE 2017-2018Anonymous LOcT0gjqdSPas encore d'évaluation
- Exposé Géotechnique RoutiéreDocument43 pagesExposé Géotechnique RoutiéreMamadou SowPas encore d'évaluation
- Guide 1Document16 pagesGuide 1Ktat fatmaPas encore d'évaluation
- BL30 - Effecteurs MusculairesDocument32 pagesBL30 - Effecteurs MusculairesAmine El ZergPas encore d'évaluation