Vous aimerez peut-être aussi
- La Rotation Dans Le Plan Cours Et Exercices CorrigesDocument9 pagesLa Rotation Dans Le Plan Cours Et Exercices Corrigesleroy makita loubakiPas encore d'évaluation
- Isometrie CoursDocument6 pagesIsometrie CoursSalihou Alhadji100% (1)
- 1C Maths Leçon 08 Composée de Transformations Du PlanDocument14 pages1C Maths Leçon 08 Composée de Transformations Du PlanNamory100% (1)
- Synthèse - Chapitre 4 - Transformation Du PlanDocument2 pagesSynthèse - Chapitre 4 - Transformation Du Plancomptenetflix360Pas encore d'évaluation
- Rotation 2Document5 pagesRotation 2ANAS ikhrichi100% (1)
- 9trigonajib1 PDFDocument16 pages9trigonajib1 PDFJohn Lwis100% (1)
- IsométrieDocument4 pagesIsométrieNour Ben MessaoudPas encore d'évaluation
- Cours Rotation 4maths (N'est Pas Évoqué en 3eme)Document4 pagesCours Rotation 4maths (N'est Pas Évoqué en 3eme)GI 2 Session 2018-2019100% (1)
- Etude Analytique Du Cercle Resume de Cours 1Document1 pageEtude Analytique Du Cercle Resume de Cours 1Mahfoud Natsu100% (2)
- Isom Depl Antidepl BAC2021Document12 pagesIsom Depl Antidepl BAC2021Patrice GoncePas encore d'évaluation
- Transformations Du Plans SynthèseDocument6 pagesTransformations Du Plans SynthèseyannickPas encore d'évaluation
- 1re S Cerlce Trigo Mesure AnglesDocument6 pages1re S Cerlce Trigo Mesure Anglesنذير طيارPas encore d'évaluation
- Angles N PDFDocument6 pagesAngles N PDFMęd Moųštaf100% (1)
- Chapitre 9 Angles Orientés Trigonométrie: Premières NotionsDocument10 pagesChapitre 9 Angles Orientés Trigonométrie: Premières NotionsJohan FaberPas encore d'évaluation
- Chap 15Document12 pagesChap 15Hamade MedPas encore d'évaluation
- Lecon Phy 1Document4 pagesLecon Phy 1Hua WeiPas encore d'évaluation
- EMI TOPO Chapitre 2 Les Projections Cartographiques Mars 2020 V3Document10 pagesEMI TOPO Chapitre 2 Les Projections Cartographiques Mars 2020 V3Asmaa KasmiPas encore d'évaluation
- La Rotation Dans Le Plan Cours Et Exercices Corriges 1Document4 pagesLa Rotation Dans Le Plan Cours Et Exercices Corriges 1Safaa El achhabPas encore d'évaluation
- MIMTH-FO-1403 - Trigonométrie - ThéorieDocument20 pagesMIMTH-FO-1403 - Trigonométrie - Théoriey.baelli05Pas encore d'évaluation
- Cours de Trigonométrie (Mathsenligne)Document2 pagesCours de Trigonométrie (Mathsenligne)caron NathanPas encore d'évaluation
- IsomDocument26 pagesIsomNj Nj100% (1)
- 3g4 - Crs - Rotations - Angles - Polygones R GuliersDocument2 pages3g4 - Crs - Rotations - Angles - Polygones R GuliersclaramariacouryPas encore d'évaluation
- M 5 Aschap 11Document25 pagesM 5 Aschap 11Mohamed Lemin MoustaphaPas encore d'évaluation
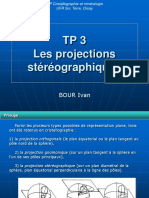
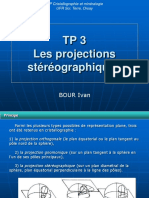
- TP Projections Stc3a9rc3a9ographiques PDFDocument30 pagesTP Projections Stc3a9rc3a9ographiques PDFTRAOREPas encore d'évaluation
- TP3 Les Projections Stéréographiques: BOUR IvanDocument30 pagesTP3 Les Projections Stéréographiques: BOUR IvanIvan Fotso NjomziePas encore d'évaluation
- Rotation 3ème MathématiquesDocument3 pagesRotation 3ème MathématiquesGhofran NahdiPas encore d'évaluation
- 31-104 Optique Miroirs PDFDocument13 pages31-104 Optique Miroirs PDFKheria ZitouniPas encore d'évaluation
- RDM Chapitre III Caracteristiques Geometriques Sections 2018Document38 pagesRDM Chapitre III Caracteristiques Geometriques Sections 2018Chadbra100% (1)
- 11 RotationDocument2 pages11 Rotationaziz assiouiPas encore d'évaluation
- 1 Angles Orientes Et Trigonometrie Exercices Corriges - CompressDocument19 pages1 Angles Orientes Et Trigonometrie Exercices Corriges - Compressarthur loundou100% (1)
- Chap It Re Similitude S Directest LecDocument21 pagesChap It Re Similitude S Directest LecJohn MESSANPas encore d'évaluation
- Module AnglesDocument19 pagesModule AnglesDieudonné GBEMENOUPas encore d'évaluation
- RotationDocument6 pagesRotationaouettah israePas encore d'évaluation
- Les Droites Remarquables Dans Un TriangleDocument4 pagesLes Droites Remarquables Dans Un TriangleAlbert IsaacPas encore d'évaluation
- Maths 2C - L8 - Angle Orienté Et TrigonometrieDocument13 pagesMaths 2C - L8 - Angle Orienté Et Trigonometriehaniel jean100% (1)
- IsometrieDocument15 pagesIsometriefatma tlibaPas encore d'évaluation
- MC1 Cristallo-Chap IIDocument10 pagesMC1 Cristallo-Chap IIMahdi JmaiPas encore d'évaluation
- Chapitre 16Document5 pagesChapitre 16Stephane AtabongPas encore d'évaluation
- Isom Cours 3Document5 pagesIsom Cours 3andoPas encore d'évaluation
- Cour Analyse VectorielleDocument18 pagesCour Analyse VectorielleSee HawaPas encore d'évaluation
- TC 10 Trigo Cr1Fr AmmariDocument5 pagesTC 10 Trigo Cr1Fr Ammariyassine.nachit4Pas encore d'évaluation
- Groupes DespacesDocument16 pagesGroupes DespacesSamah SamahPas encore d'évaluation
- Optique MiroirsDocument13 pagesOptique MiroirsDocteur Albert TouatiPas encore d'évaluation
- Cours Géométrie Dans L'espaceDocument9 pagesCours Géométrie Dans L'espaceYandy-Alexandre MIEMOUNITOUPas encore d'évaluation
- Syllabus Trigonometrie Et Calcule NumeriqueDocument133 pagesSyllabus Trigonometrie Et Calcule NumeriqueLEONARDI TEMBO100% (1)
- Chapitre 2 Trigonométrie: I. Le Cercle Trigonométrique Et RadianDocument5 pagesChapitre 2 Trigonométrie: I. Le Cercle Trigonométrique Et RadianAlex AnneronPas encore d'évaluation
- Cours+Trigo+ +Version+ProfDocument8 pagesCours+Trigo+ +Version+Profdahmane.k92Pas encore d'évaluation
- Geometrie Et Trigonometrie Première Nm+NsDocument27 pagesGeometrie Et Trigonometrie Première Nm+Nsmohamed.dialloPas encore d'évaluation
- Tcs Transformations Cour JadidDocument8 pagesTcs Transformations Cour JadidSanogoPas encore d'évaluation
- OS Mec 21-22 EX4Document3 pagesOS Mec 21-22 EX4youssef bassirPas encore d'évaluation
- 0B W Sprn2GfpY2M2OTgwZWQtNTQ3OS00NzZhLWFlNjktZjdjNWRhMDEwNzY5Document2 pages0B W Sprn2GfpY2M2OTgwZWQtNTQ3OS00NzZhLWFlNjktZjdjNWRhMDEwNzY5Asma BousamePas encore d'évaluation
- Syllabus TrigoDocument133 pagesSyllabus TrigograndedamePas encore d'évaluation
- Méca Ing Des Roches CH3Document50 pagesMéca Ing Des Roches CH3Meissa Beye100% (1)
- Séries N°1 Et 2 Du TD - Mécanique Du Point Matériel - 2022-2023-1Document2 pagesSéries N°1 Et 2 Du TD - Mécanique Du Point Matériel - 2022-2023-1Papa SeckPas encore d'évaluation
- Rotation 3eme MathematiquesDocument4 pagesRotation 3eme Mathematiqueskhalilbouanai999Pas encore d'évaluation
- Symetrie AxialeDocument20 pagesSymetrie AxialeIbtissam NfissiPas encore d'évaluation
- Cours de TrigonometrieDocument7 pagesCours de TrigonometriezlimitounePas encore d'évaluation
- Equations Du Chapitre 2Document2 pagesEquations Du Chapitre 2Badr Eddine MebarkiPas encore d'évaluation
- GeometrieplaneDocument30 pagesGeometrieplanePitchou RyanPas encore d'évaluation
- Chingatome-Seconde-Fonctions TrigonométriquesDocument2 pagesChingatome-Seconde-Fonctions TrigonométriqueswalidPas encore d'évaluation
- Mécanique Du Point MatérielDocument27 pagesMécanique Du Point MatérielNourelaaPas encore d'évaluation
- Triangle GeneralitesDocument18 pagesTriangle Generalitesamineb15Pas encore d'évaluation
- TD +correct - Géométrie Des MassesDocument12 pagesTD +correct - Géométrie Des Massessoufienne100% (2)
- Nombre Complexes Exercices Maths Terminale S Corriges en PDFDocument9 pagesNombre Complexes Exercices Maths Terminale S Corriges en PDFSaleh ELBRAIJIPas encore d'évaluation
- 2 PDFDocument27 pages2 PDFAnonymous ipAlxWPas encore d'évaluation
- Géométrie-2018 Par MR HouimdiDocument133 pagesGéométrie-2018 Par MR Houimdiblossomhere38Pas encore d'évaluation
- Serie Exo s1Document13 pagesSerie Exo s1neharremy2Pas encore d'évaluation
- Vecteurs Espace ExercicesDocument15 pagesVecteurs Espace ExercicesJoliette KplokaPas encore d'évaluation
- Chap 6Document31 pagesChap 6fouad bouzahrPas encore d'évaluation
- EspaceDocument36 pagesEspaceFouzia BadiPas encore d'évaluation
- 11 RotationDocument2 pages11 Rotationaziz assiouiPas encore d'évaluation
- TransformationsDocument4 pagesTransformationsElla FekihPas encore d'évaluation
- Geometrie EspaceDocument44 pagesGeometrie Espacefvictor58Pas encore d'évaluation
- Laamyem 2Document31 pagesLaamyem 2Manuel ArzolaPas encore d'évaluation
- Notes de Cours Chapitre 3Document15 pagesNotes de Cours Chapitre 3rayane.atalhaouiPas encore d'évaluation
- Le Mystère Des SangakuDocument6 pagesLe Mystère Des SangakupidemiPas encore d'évaluation
- Chap 13, Maths PDFDocument10 pagesChap 13, Maths PDFZineb LahlouPas encore d'évaluation
- ExercicesDocument4 pagesExercicesJennifer Dos SantosPas encore d'évaluation
- Chap3-Caractéristiques GéométriquesDocument18 pagesChap3-Caractéristiques GéométriquesMiSs MåissaPas encore d'évaluation
- Triangle Rectangle Et Cercle Circonscrit (4ème)Document3 pagesTriangle Rectangle Et Cercle Circonscrit (4ème)MATHS - VIDEOS100% (1)
- TrigonométrieDocument11 pagesTrigonométrieTapha BaPas encore d'évaluation
- Exercice SDocument6 pagesExercice SSofiene GuedriPas encore d'évaluation
- Ce2 Exercices Angle DroitDocument4 pagesCe2 Exercices Angle DroitAZ RobotronicPas encore d'évaluation
- 6 Homothetie RotationDocument20 pages6 Homothetie RotationKakou Light MalanPas encore d'évaluation
- Maths 9 Chapitre 1Document45 pagesMaths 9 Chapitre 1shekinahg0845Pas encore d'évaluation
- Cours 2nde Trigonometrie ExercicesDocument2 pagesCours 2nde Trigonometrie ExercicesEdouard DioufPas encore d'évaluation
- Le Concours Complet D'équitation: CorrectionDocument5 pagesLe Concours Complet D'équitation: CorrectionnabilPas encore d'évaluation