Vous aimerez peut-être aussi
- Physique Appli 2004Document8 pagesPhysique Appli 2004bayaPas encore d'évaluation
- ZF Error CodesDocument58 pagesZF Error CodesParc Elyes100% (2)
- Groupe ElectrogeneDocument6 pagesGroupe ElectrogeneKINTAROOE92Pas encore d'évaluation
- Moteur AsynchroneDocument9 pagesMoteur AsynchroneMahdi El MarrakchiPas encore d'évaluation
- Moteur Asyhchrone TriphaseDocument7 pagesMoteur Asyhchrone TriphaseFalilou DramePas encore d'évaluation
- Moteur AsynchroneDocument12 pagesMoteur Asynchroneasmaahmedhassan12Pas encore d'évaluation
- MAS Cours CompletDocument39 pagesMAS Cours Completطنين نسنسPas encore d'évaluation
- Cours Machine AsynchroneDocument28 pagesCours Machine AsynchroneMeryem El MennaouyPas encore d'évaluation
- 02 Moteur AsynchroneDocument11 pages02 Moteur AsynchroneLebel NkogoPas encore d'évaluation
- Chapitre II Le Moteur AsynchroneDocument12 pagesChapitre II Le Moteur AsynchroneAziz Kabore100% (1)
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- Cours - Machines - Asynchrones MODELISATIONDocument53 pagesCours - Machines - Asynchrones MODELISATIONtamsirniangPas encore d'évaluation
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantPas encore d'évaluation
- Fonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFDocument8 pagesFonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFAmscool SavadogoPas encore d'évaluation
- Chapitre I - MAS (Cours)Document11 pagesChapitre I - MAS (Cours)Youssef dbPas encore d'évaluation
- Theoreme de FerarriDocument4 pagesTheoreme de FerarriKamita Medias100% (1)
- MAS 3phDocument23 pagesMAS 3phabdelwahad100% (1)
- Cours - Variateur de Vitesse - MCADocument28 pagesCours - Variateur de Vitesse - MCAboutalibzinebPas encore d'évaluation
- MOTEUR ASYHCHRONE TRIPHASE - ProfDocument8 pagesMOTEUR ASYHCHRONE TRIPHASE - ProfFallouGueyeMawahibouPas encore d'évaluation
- Résumé Moteur Asynchrone Avec ExercicesDocument5 pagesRésumé Moteur Asynchrone Avec ExercicesjamesPas encore d'évaluation
- Chap3 Machine AsynchroneDocument41 pagesChap3 Machine AsynchroneIlyas NahiPas encore d'évaluation
- Chapitre 2-1Document10 pagesChapitre 2-1Oussama JaafariPas encore d'évaluation
- Cours Moteur AsynchroneDocument7 pagesCours Moteur AsynchroneOmar Ait gabPas encore d'évaluation
- Moteur Asynchrone TriphaséDocument10 pagesMoteur Asynchrone Triphaséamos carlos gueiPas encore d'évaluation
- Chapitre 1 Rappels Les Machines Asynchrones TriphaseesDocument9 pagesChapitre 1 Rappels Les Machines Asynchrones TriphaseesNuno HenriquesPas encore d'évaluation
- cours-LP MEED Prof Chapitre 1 Le Moteur AsynchroneDocument13 pagescours-LP MEED Prof Chapitre 1 Le Moteur AsynchroneBruno MarquesPas encore d'évaluation
- Diapo de CoursDocument36 pagesDiapo de Courssaid waelPas encore d'évaluation
- Moteurs Asynchrones TriphasésDocument34 pagesMoteurs Asynchrones TriphasésMajda SerbatPas encore d'évaluation
- TP MasDocument9 pagesTP MasDjalal Eddine HammachiPas encore d'évaluation
- SaadiDocument14 pagesSaadiZakaria MaazazPas encore d'évaluation
- Ch6 Machine SynchroneDocument18 pagesCh6 Machine Synchronearnaud29100% (3)
- Cours Lp3eme Chapitre Moteur AsynchroneDocument15 pagesCours Lp3eme Chapitre Moteur AsynchroneSimo LaassiriPas encore d'évaluation
- Moteur Asynchrone Triphasé: 1. Constitution Et Principe de FonctionnementDocument7 pagesMoteur Asynchrone Triphasé: 1. Constitution Et Principe de Fonctionnementhassna ait aliPas encore d'évaluation
- MasDocument16 pagesMasSôûLãymãne BénPas encore d'évaluation
- Machines Synchrones Et AsynchronesDocument18 pagesMachines Synchrones Et Asynchronestaylhor100% (3)
- Machine AsynchroneDocument7 pagesMachine AsynchroneFatma Borgi Ep SaadaouiPas encore d'évaluation
- Générateurs: 1.définitionsDocument11 pagesGénérateurs: 1.définitionssmail lahmidiPas encore d'évaluation
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedPas encore d'évaluation
- Cours8 Modèle MASDocument26 pagesCours8 Modèle MASKamal PcPas encore d'évaluation
- MAS3 - CoursDocument5 pagesMAS3 - Coursben 10Pas encore d'évaluation
- 05 MAS-N1 DM Ima401Document12 pages05 MAS-N1 DM Ima401salwa.echalih-etuPas encore d'évaluation
- Chapitre1 MAS Triphasé - BOUZIDocument10 pagesChapitre1 MAS Triphasé - BOUZIkawtar elbirakiPas encore d'évaluation
- tp4MOTEURS ASYNCHRONES TRIPHASESDocument13 pagestp4MOTEURS ASYNCHRONES TRIPHASESsalahouchenesalahPas encore d'évaluation
- Machines Synchrones Et AsynchronesDocument18 pagesMachines Synchrones Et AsynchronesbenhabriaPas encore d'évaluation
- Chapitre5 MASDocument10 pagesChapitre5 MASsmail chaariPas encore d'évaluation
- MoteurAsynchrone PDFDocument3 pagesMoteurAsynchrone PDFomarah4550% (2)
- Upload - Série D'exercices N°9-MAS 3 PDFDocument5 pagesUpload - Série D'exercices N°9-MAS 3 PDFHichem HamdiPas encore d'évaluation
- Electrotechnique 2 GET - Chap II - Machine AsynchroneDocument16 pagesElectrotechnique 2 GET - Chap II - Machine Asynchronerajaa latifiPas encore d'évaluation
- 1CPI Cours MASDocument8 pages1CPI Cours MASANDAHMOUPas encore d'évaluation
- Cours - Electricite - Moteur Asynchrone - Terminale StiDocument11 pagesCours - Electricite - Moteur Asynchrone - Terminale StiAissam EssanhajiPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Résistance Mécanique Des Vis: Essai de TractionDocument6 pagesRésistance Mécanique Des Vis: Essai de TractionParc ElyesPas encore d'évaluation
- Modèle PFADocument12 pagesModèle PFAParc ElyesPas encore d'évaluation
- Compteur Horaire Cat 140KDocument8 pagesCompteur Horaire Cat 140KParc ElyesPas encore d'évaluation
- Rapport Intervention ViergeDocument2 pagesRapport Intervention ViergeParc ElyesPas encore d'évaluation
- Pfe-Pfa 3gem 2019-2020 V050520Document15 pagesPfe-Pfa 3gem 2019-2020 V050520Parc ElyesPas encore d'évaluation
- Cours Usinage CNC 2019 PDFDocument35 pagesCours Usinage CNC 2019 PDFParc Elyes67% (3)
- Tableau de Bord Gestion Parc AutomobileDocument19 pagesTableau de Bord Gestion Parc AutomobileParc ElyesPas encore d'évaluation
- Support de TP GMAODocument31 pagesSupport de TP GMAOParc Elyes0% (1)
- UntitledDocument2 pagesUntitledParc ElyesPas encore d'évaluation
- UntitledDocument5 pagesUntitledParc Elyes100% (1)
- CH 1 Securite Des MO Tech Des CH de Prod UAS 2017 2018Document9 pagesCH 1 Securite Des MO Tech Des CH de Prod UAS 2017 2018Parc ElyesPas encore d'évaluation
- Technologie Des Chaines de Production Et GPDocument94 pagesTechnologie Des Chaines de Production Et GPParc Elyes100% (2)
- Syst M Esther Mi Ques Industrie LsDocument192 pagesSyst M Esther Mi Ques Industrie LsParc ElyesPas encore d'évaluation
- Examen Semestriel Technologie Des Chde Prod UAS 3EM Janv 2018Document11 pagesExamen Semestriel Technologie Des Chde Prod UAS 3EM Janv 2018Parc ElyesPas encore d'évaluation
- TRAVAUX DIRIGES-électronigue de PuissanceDocument29 pagesTRAVAUX DIRIGES-électronigue de PuissancezikanPas encore d'évaluation
- ThermoDocument51 pagesThermoHamidou GamboPas encore d'évaluation
- C - Courants Électriques Continu Et AlternatifDocument37 pagesC - Courants Électriques Continu Et AlternatifMohamed TekoukPas encore d'évaluation
- Modicon ABT7 - ABL6 - ABL6TS40UDocument3 pagesModicon ABT7 - ABL6 - ABL6TS40UFame TechnologyPas encore d'évaluation
- Hacheur Série Et Variateur de Vitesse Industriel N.L.techNIQUE PROF S.charIDocument8 pagesHacheur Série Et Variateur de Vitesse Industriel N.L.techNIQUE PROF S.charIAymen HssainiPas encore d'évaluation
- Procédure Technique PT-EL-01 IR 00Document6 pagesProcédure Technique PT-EL-01 IR 00Mohamed Ali Horrigue100% (2)
- 03-SLT Régime TTDocument14 pages03-SLT Régime TTLinda batolaPas encore d'évaluation
- TP Elt1 Himour-ConvertiDocument44 pagesTP Elt1 Himour-ConvertiFlying BananaPas encore d'évaluation
- Circuits Triphasés DésequilibrésDocument21 pagesCircuits Triphasés DésequilibrésJalel KhediriPas encore d'évaluation
- Chapitre 3 Haute TemperatureDocument18 pagesChapitre 3 Haute Temperaturekhalilkhalilb9Pas encore d'évaluation
- TD N1 MenrnDocument4 pagesTD N1 Menrnbahri ahmedPas encore d'évaluation
- Transformate UrDocument6 pagesTransformate UrMohammed ChaouqiPas encore d'évaluation
- Cellule NexDocument6 pagesCellule NexAnonymous xBi2FsBxPas encore d'évaluation
- LC1D09Document2 pagesLC1D09youri59490Pas encore d'évaluation
- Comar bmr6Document4 pagesComar bmr6Sch MarceloPas encore d'évaluation
- SG Physique UAA1 ElectricitéDocument35 pagesSG Physique UAA1 ElectricitéWagner ClémentPas encore d'évaluation
- Ce Document Est À Usage Exclusif Et Non Collectif: Maia Sonnier 49170844Document13 pagesCe Document Est À Usage Exclusif Et Non Collectif: Maia Sonnier 49170844SambPas encore d'évaluation
- Serie 3Document9 pagesSerie 3MohamedNoamPas encore d'évaluation
- Moteur Asynchrone TriphaséDocument11 pagesMoteur Asynchrone TriphaséAmira WarhéniPas encore d'évaluation
- CAT - Qualité EnergieDocument24 pagesCAT - Qualité Energieasmaa el mahiPas encore d'évaluation
- Les Organes D'une Installation D'éclairageDocument11 pagesLes Organes D'une Installation D'éclairageHatake BenaoudaPas encore d'évaluation
- Protections Électriques Des Alternateurs Et Moteurs: Réf.: D3775 V1Document33 pagesProtections Électriques Des Alternateurs Et Moteurs: Réf.: D3775 V1haddadwalid.engPas encore d'évaluation
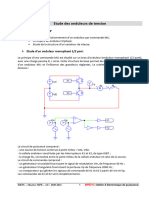
- Etude Des Onduleurs de TensionDocument5 pagesEtude Des Onduleurs de TensionNaima mecherguiPas encore d'évaluation
- TP GrimesDocument13 pagesTP Grimesyasser kingPas encore d'évaluation
- Route UrsDocument270 pagesRoute Urszao1020004497Pas encore d'évaluation
- Les Centrales Thermiques: Filière: Génie ElectriqueDocument24 pagesLes Centrales Thermiques: Filière: Génie ElectriqueZin.YPas encore d'évaluation
- Chapitre 5 Installations Electriques IndustriellesDocument6 pagesChapitre 5 Installations Electriques IndustriellesAymen JbeliPas encore d'évaluation
- Calcul TransformateurDocument1 pageCalcul TransformateurBachir Abou AkramPas encore d'évaluation
- Exercice 1Document7 pagesExercice 1Ahmed Benabdallah100% (1)