Vous aimerez peut-être aussi
- WN CFD 14 5Document53 pagesWN CFD 14 5c16b1bc770d7Pas encore d'évaluation
- Stage SergioLESCANODocument62 pagesStage SergioLESCANOSergio Lescano AlvaradoPas encore d'évaluation
- Rapport - Version FinaleDocument88 pagesRapport - Version FinaleromPas encore d'évaluation
- Cype2018 MDocument3 pagesCype2018 MAdel FehriPas encore d'évaluation
- Kacimi Iams-Miguel Oriana - Motion Capture Et Rendu Expressif - Expérimentations Esthétiques Et AnimationDocument121 pagesKacimi Iams-Miguel Oriana - Motion Capture Et Rendu Expressif - Expérimentations Esthétiques Et AnimationsultanaastoufallPas encore d'évaluation
- Université de Technologie de Troyes Université de Technologie de TroyesDocument251 pagesUniversité de Technologie de Troyes Université de Technologie de TroyesbenchallalhaitamPas encore d'évaluation
- Moutaser - 1Document11 pagesMoutaser - 1Ramadan hassanPas encore d'évaluation
- Cours Architecture OrdinateursDocument124 pagesCours Architecture Ordinateursdominiquegavli1Pas encore d'évaluation
- Lahmar Oussama Djeddi Seif EddineDocument80 pagesLahmar Oussama Djeddi Seif Eddinehamza.ouenjliPas encore d'évaluation
- Parcours Guidé Freecad: Tutoriel Pour Débuter Sur FreecadDocument353 pagesParcours Guidé Freecad: Tutoriel Pour Débuter Sur FreecadYassir QaosPas encore d'évaluation
- Table Des MatieresDocument68 pagesTable Des Matiereselmallaliomar01Pas encore d'évaluation
- Cours CompletDocument69 pagesCours CompletDhafer MezghaniPas encore d'évaluation
- Komivi Kevin Agbakpem MSC 2006Document204 pagesKomivi Kevin Agbakpem MSC 2006igorzactenePas encore d'évaluation
- CYPECAD - Mémoire de CalculDocument156 pagesCYPECAD - Mémoire de CalculTouoyem100% (2)
- Chap 1Document75 pagesChap 1lacothPas encore d'évaluation
- Formation C2i - B5Document78 pagesFormation C2i - B5elouadilPas encore d'évaluation
- MS - Cdet - C - Appareils À PressionDocument45 pagesMS - Cdet - C - Appareils À PressionABDELAALI RAZOUKIPas encore d'évaluation
- Ifc Vers TrnsysDocument39 pagesIfc Vers TrnsysIbaaz KhalidPas encore d'évaluation
- Machines-Outils À Commande Numérique Structure, Modélisation Et RéglageDocument67 pagesMachines-Outils À Commande Numérique Structure, Modélisation Et RéglageMohamed El Hadi Redjaimia69% (16)
- Bouakkaz YoucefDocument47 pagesBouakkaz Youcefl mPas encore d'évaluation
- Cao RapportDocument41 pagesCao RapportDhouha AbbassiPas encore d'évaluation
- RPNE000025PPDocument75 pagesRPNE000025PPSidahmed LarbaouiPas encore d'évaluation
- These Adnan MartiniDocument303 pagesThese Adnan MartinimichelPas encore d'évaluation
- 2 Productique: Amal TalebmohDocument10 pages2 Productique: Amal TalebmohAMAL TALEBMOHPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- These Borhen LOUHICHIDocument150 pagesThese Borhen LOUHICHIBAMOUROU SANOGOPas encore d'évaluation
- Ujjjjg GHJVJ JJ HJJBNDocument59 pagesUjjjjg GHJVJ JJ HJJBNayoubPas encore d'évaluation
- Livret CATIA V5Document56 pagesLivret CATIA V5EL-AARBAOUI ABDELJALILPas encore d'évaluation
- Parcours FreecadDocument191 pagesParcours FreecadnemoxenoPas encore d'évaluation
- Analyse Des Systèmes Et Matrices D'état - Exercices Multi-PhysiquesDocument524 pagesAnalyse Des Systèmes Et Matrices D'état - Exercices Multi-PhysiquesMohamed EddriefPas encore d'évaluation
- Guide Revit StructureDocument98 pagesGuide Revit StructureHama Slim100% (8)
- Rapport Fini duTP SurpacDocument44 pagesRapport Fini duTP Surpacboboyi100% (1)
- Cours D'analyse 2ND Ch-Ti 2020 EleveDocument21 pagesCours D'analyse 2ND Ch-Ti 2020 Elevefokou.simplicegmail.com Fokou SimplicePas encore d'évaluation
- These Adnan MartiniDocument302 pagesThese Adnan MartiniPascal Avoie100% (1)
- Tutorial FRDocument107 pagesTutorial FRNKGB MagenPas encore d'évaluation
- 2019 Analyse Et Mise en Place Dun Simulateur Et Dun Hyperviseur Incluant Des Scenarios Dentrainement Destines Aux Etudiants Du Master en CybersecuriteDocument118 pages2019 Analyse Et Mise en Place Dun Simulateur Et Dun Hyperviseur Incluant Des Scenarios Dentrainement Destines Aux Etudiants Du Master en CybersecuritearmandPas encore d'évaluation
- RapportDocument76 pagesRapportSoumaya Ben AbdallahPas encore d'évaluation
- Cours-Informatique - S4-ESPC-Avril 2018 - 1 PDFDocument51 pagesCours-Informatique - S4-ESPC-Avril 2018 - 1 PDFBrandon ZounimbiatPas encore d'évaluation
- CYPECAD Memoire de Calcul PDFDocument141 pagesCYPECAD Memoire de Calcul PDFNZOMOPas encore d'évaluation
- MEF Cours COMPLET - 11-12Document54 pagesMEF Cours COMPLET - 11-12Zahira BouelhazPas encore d'évaluation
- Djalal & YazidDocument107 pagesDjalal & YazidBrahim IssamPas encore d'évaluation
- Rhino Level 2 v4Document251 pagesRhino Level 2 v4t_dechangyPas encore d'évaluation
- Rapport BEDocument49 pagesRapport BEiheb.benlakhelPas encore d'évaluation
- Manuel de Référence TournageDocument127 pagesManuel de Référence TournagedayangPas encore d'évaluation
- Amélioration Du Fonctionnement Du Tronçon Souffleuse - Remplisseuse de La Ligne 4LB de CEVITAL Avec SIMA 0Document135 pagesAmélioration Du Fonctionnement Du Tronçon Souffleuse - Remplisseuse de La Ligne 4LB de CEVITAL Avec SIMA 0hacene100% (2)
- Initiation A La Radio Commande (THOBOIS 1983 130p)Document130 pagesInitiation A La Radio Commande (THOBOIS 1983 130p)Hassan AbaPas encore d'évaluation
- Cypecad - ExempleDocument55 pagesCypecad - ExempleIlyas Kami80% (5)
- Memoire EmawilDocument81 pagesMemoire EmawilconstantPas encore d'évaluation
- Table Des MatieresDocument9 pagesTable Des MatieresLarotsyPas encore d'évaluation
- Rapport Projet Bras RobotiqueDocument69 pagesRapport Projet Bras RobotiqueAyoub Bahtat97% (34)
- Groupe 11 87 S13 Document FinalDocument46 pagesGroupe 11 87 S13 Document FinalhugomalevePas encore d'évaluation
- David HartonDocument123 pagesDavid HartonLaouini OussamaPas encore d'évaluation
- Technologie Fonctionnelle de L'automobileDocument24 pagesTechnologie Fonctionnelle de L'automobileMerdas Chamseddine50% (2)
- FATIDocument26 pagesFATIFatima zahra SilmiPas encore d'évaluation
- These BHerman UCL-UM2 PubliqueDocument254 pagesThese BHerman UCL-UM2 PubliqueMODEUSPas encore d'évaluation
- HDR Frederic GiraudDocument118 pagesHDR Frederic GiraudtittouPas encore d'évaluation
- Rep Stage Rochette CFDDocument54 pagesRep Stage Rochette CFDKhadidja DouPas encore d'évaluation
- AODocument44 pagesAOSouha Bel Haj HassinePas encore d'évaluation
- Conception Et Implementation Du SystemeDocument33 pagesConception Et Implementation Du SystemeZakia HamdiPas encore d'évaluation
- Du crayon à l'imprimante: Alphabétisation, micro-informatique et sémiotiqueD'EverandDu crayon à l'imprimante: Alphabétisation, micro-informatique et sémiotiquePas encore d'évaluation
- Gestion de ProductionDocument479 pagesGestion de ProductionMehdi El Foutouhi100% (3)
- MotorisationDocument68 pagesMotorisationNabil SerrafiPas encore d'évaluation
- L'avenir Des Industries MécaniquesDocument234 pagesL'avenir Des Industries MécaniquesL'Usine Nouvelle0% (1)
- Guide Ca2012 BDDocument324 pagesGuide Ca2012 BDNabil SerrafiPas encore d'évaluation
- Cours Hydraulique IndustrielleDocument87 pagesCours Hydraulique IndustrielleNabil Serrafi100% (16)
- MementoDocument77 pagesMementoNabil SerrafiPas encore d'évaluation
- Design Industriel 1Document2 pagesDesign Industriel 1Nabil SerrafiPas encore d'évaluation
- Corrige TD 8 1920 2Document5 pagesCorrige TD 8 1920 2friends diaryPas encore d'évaluation
- TD6 PhysiqueDocument4 pagesTD6 PhysiqueEric DeumoPas encore d'évaluation
- UE Cybersécurité-Initiation Metasploit v0.3Document17 pagesUE Cybersécurité-Initiation Metasploit v0.3didierPas encore d'évaluation
- Algèbre 1 V. Def 2017-2018Document141 pagesAlgèbre 1 V. Def 2017-2018Alexis Rosuel100% (1)
- Sujet Bac 2023 Guinee Niger MathsDocument5 pagesSujet Bac 2023 Guinee Niger Mathsmr.4chiffrePas encore d'évaluation
- ChapitreDocument8 pagesChapitreAchour IfrekPas encore d'évaluation
- TD Regime de Neutre TTDocument4 pagesTD Regime de Neutre TTOlivier FLOHRPas encore d'évaluation
- Examen de Fin de Formation 2008 Tsri Pratique Variante 9Document5 pagesExamen de Fin de Formation 2008 Tsri Pratique Variante 9FatimaLEPas encore d'évaluation
- TP 1Document1 pageTP 1djennati100% (1)
- Serco FDocument26 pagesSerco FRV PenrroiPas encore d'évaluation
- Howto L3 IntervlanroutingDocument7 pagesHowto L3 IntervlanroutingWilford ToussaintPas encore d'évaluation
- NF EN 1431 (Mai 2009)Document19 pagesNF EN 1431 (Mai 2009)Fatima BouhajaPas encore d'évaluation
- DS SDM S1 2015 CorrectionDocument2 pagesDS SDM S1 2015 CorrectiondsiscnPas encore d'évaluation
- Geometrie Pour Dao2 PDFDocument161 pagesGeometrie Pour Dao2 PDFlekouf43100% (1)
- FeuilletageDocument25 pagesFeuilletageLē JøkērPas encore d'évaluation
- GPM Tle C 3e Edition.Document258 pagesGPM Tle C 3e Edition.Pierrot Jules AMOUSSOU100% (2)
- Api RestDocument8 pagesApi RestfogoPas encore d'évaluation
- TF06 P09 MedianDocument4 pagesTF06 P09 MedianAyt Moha BrahimPas encore d'évaluation
- Cours ExcelDocument80 pagesCours ExcelLahcen Boufouss100% (1)
- CC 1 Analyse Natalia Borbón TorresDocument3 pagesCC 1 Analyse Natalia Borbón TorresNatalia Borbon TorresPas encore d'évaluation
- 04 JSFT-echangeur-2012 GRESPI Fohanno PDFDocument21 pages04 JSFT-echangeur-2012 GRESPI Fohanno PDFzermiPas encore d'évaluation
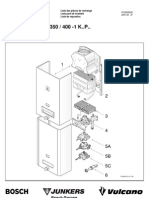
- W - 250 - 275 - 325 - 350 - 400 - 1 K..p..Document28 pagesW - 250 - 275 - 325 - 350 - 400 - 1 K..p..joviadoPas encore d'évaluation
- Mémoire de Master-YF-Post Soutenance-20200610Document70 pagesMémoire de Master-YF-Post Soutenance-20200610Yacinthe FAYE100% (1)
- Ajust ExpoDocument4 pagesAjust ExpoMme_Sos100% (1)
- DJE4394Document119 pagesDJE4394danPas encore d'évaluation
- Unite 71 Manuel OpératoireDocument110 pagesUnite 71 Manuel OpératoireAbdessalem Bougoffa50% (2)
- ANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020Document3 pagesANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020younes amaraPas encore d'évaluation
- Exercices Chapitre 3 FractionsDocument3 pagesExercices Chapitre 3 FractionsTony GRACAPas encore d'évaluation
- Cours Lignes de Transmission Séance Adaptation D'impédance 2011 2012Document8 pagesCours Lignes de Transmission Séance Adaptation D'impédance 2011 2012benlamlihPas encore d'évaluation
- Incendie: I-Prévention Et ProtectionDocument4 pagesIncendie: I-Prévention Et Protectionraid bazizPas encore d'évaluation