Vous aimerez peut-être aussi
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- ssp304 FDocument52 pagesssp304 FDavePas encore d'évaluation
- TD 19 - Lois Entrée-Sortie en Position Et en VitesseDocument10 pagesTD 19 - Lois Entrée-Sortie en Position Et en Vitessebhs channel100% (2)
- MOTO ExercicesDocument12 pagesMOTO ExercicesCharles GoPas encore d'évaluation
- Systeme Hydrauliques Et Pneumatiques l3 CM PDFDocument30 pagesSysteme Hydrauliques Et Pneumatiques l3 CM PDFmimi mimPas encore d'évaluation
- Limites Et Continuite Cours 1 1 PDFDocument17 pagesLimites Et Continuite Cours 1 1 PDFAdam Chouma100% (1)
- Application 5 Inverseur de MarcheDocument4 pagesApplication 5 Inverseur de Marcheمقاطع فري فايرPas encore d'évaluation
- Liebherr Électrique 312Document22 pagesLiebherr Électrique 312LiebherrPas encore d'évaluation
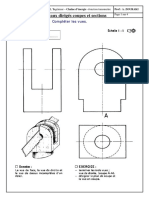
- 7 TD Coupes Et SectionsDocument5 pages7 TD Coupes Et SectionsAdam ChoumaPas encore d'évaluation
- TD 12 - Comportement Cinématique Des SystèmesDocument10 pagesTD 12 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
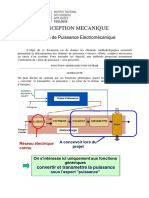
- Caractéristiques Mécaniques D'une Chaine D'energie ProfesseurDocument8 pagesCaractéristiques Mécaniques D'une Chaine D'energie ProfesseurTriki BilelPas encore d'évaluation
- AitBelkacemDihia AbdiCyliaDocument71 pagesAitBelkacemDihia AbdiCyliaMohamed TdPas encore d'évaluation
- Eurocode 8 Chapitre 3Document85 pagesEurocode 8 Chapitre 3Adam ChoumaPas encore d'évaluation
- TRAVAUX DIRIGES - Énergétiques - CopierDocument2 pagesTRAVAUX DIRIGES - Énergétiques - CopierSawadogoPas encore d'évaluation
- Fiche TD2Document6 pagesFiche TD2Amina BELABIDPas encore d'évaluation
- Enoncés: TD #7: Les Machines AsynchronesDocument4 pagesEnoncés: TD #7: Les Machines AsynchronesJOSLINPas encore d'évaluation
- (ModSLCI) (TD) Scoot Elec PDFDocument4 pages(ModSLCI) (TD) Scoot Elec PDFLucas CaranoPas encore d'évaluation
- 015 S Eval StatiqueDocument2 pages015 S Eval StatiquesedmorabetPas encore d'évaluation
- VigimaveredopDocument2 pagesVigimaveredopHadil SellamiPas encore d'évaluation
- Écoline MotorisationDocument6 pagesÉcoline MotorisationJawher SalemPas encore d'évaluation
- 8046 2 Dossier TechniqueDocument9 pages8046 2 Dossier TechniqueMakrem CherifPas encore d'évaluation
- Si PDFDocument22 pagesSi PDFMahrez ZaafouriPas encore d'évaluation
- TD1 Structure Et Performances Des Systemes AsservisDocument10 pagesTD1 Structure Et Performances Des Systemes AsservisWillybrood FonckPas encore d'évaluation
- Devoir 1 - 2018Document3 pagesDevoir 1 - 2018aylagnebPas encore d'évaluation
- UntitledDocument30 pagesUntitledAmin ChakibPas encore d'évaluation
- Examen Partie 1Document7 pagesExamen Partie 1Oussama SaibPas encore d'évaluation
- 6119 Enonce ScootelecDocument7 pages6119 Enonce Scooteleckamal100% (1)
- 4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFDocument24 pages4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFMed Ali MaatougPas encore d'évaluation
- 7709478Document5 pages7709478Tarak BenslimanePas encore d'évaluation
- Variateur Mot Asynchrone GEN4 Secon IUT Aisne PDFDocument32 pagesVariateur Mot Asynchrone GEN4 Secon IUT Aisne PDFhacene sedratiPas encore d'évaluation
- TD Moteur Asynchrone - Batteur-MelangeurDocument11 pagesTD Moteur Asynchrone - Batteur-MelangeurSalah SalahPas encore d'évaluation
- 02 TPAuto Ass 2012 GMCDocument8 pages02 TPAuto Ass 2012 GMCseddikmorabetPas encore d'évaluation
- Travaux DirigésDocument6 pagesTravaux DirigésBeddad Bcf UdlPas encore d'évaluation
- Exercices Des Trains EpicycloidauxDocument3 pagesExercices Des Trains Epicycloidauxmohamedaloui294Pas encore d'évaluation
- Icna 2011 SujetDocument26 pagesIcna 2011 SujetgtPas encore d'évaluation
- (Corslci) (TD) RoburocDocument9 pages(Corslci) (TD) RoburocAbdelali YacoubiPas encore d'évaluation
- Système À Étudier - Carton PréforméDocument14 pagesSystème À Étudier - Carton PréforméESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Commande - Machines Electriques - Cours 1Document23 pagesCommande - Machines Electriques - Cours 1SORY IBRAHIMA SAMBAPas encore d'évaluation
- MEO 3.2 Zoe Vs Clio - Eleves - DRDocument7 pagesMEO 3.2 Zoe Vs Clio - Eleves - DRKenzy DAHMANEPas encore d'évaluation
- RobuRoc ProfDocument10 pagesRobuRoc ProfAbdelali YacoubiPas encore d'évaluation
- Exercice BE2 Ensam MeknesDocument8 pagesExercice BE2 Ensam MeknesThe ShadowPas encore d'évaluation
- ScooterDocument5 pagesScooterBenoist VillettePas encore d'évaluation
- 2904 Porteuse Motorisee Mecanique PDFDocument17 pages2904 Porteuse Motorisee Mecanique PDFJawher SalemPas encore d'évaluation
- TD MasDocument2 pagesTD MasnabilPas encore d'évaluation
- Arcs 2016Document15 pagesArcs 2016Kamal PcPas encore d'évaluation
- Variateur-Courroie STEDocument9 pagesVariateur-Courroie STEMansour NdiayePas encore d'évaluation
- LES MOTEURS A COURANT CONTINU Doc ÉlevDocument9 pagesLES MOTEURS A COURANT CONTINU Doc ÉlevNejib JallouliPas encore d'évaluation
- 01 DS PT 2020 2021 SujetDocument10 pages01 DS PT 2020 2021 Sujets.benzekri.04Pas encore d'évaluation
- Elements de Correction Engin ChenilléDocument9 pagesElements de Correction Engin Chenilléjimmy bibosPas encore d'évaluation
- S1 CORRIGE Passage V2 PDFDocument10 pagesS1 CORRIGE Passage V2 PDFHajar Imaghri100% (1)
- Sec 2006 Sib PT PDFDocument50 pagesSec 2006 Sib PT PDFtaiebshow100% (1)
- TD Equipement Elect N 3Document2 pagesTD Equipement Elect N 3Oussama Chabbi100% (1)
- Chapitre I-CommandeDocument10 pagesChapitre I-CommandeArounan DembelePas encore d'évaluation
- 2018 Normal MatinDocument13 pages2018 Normal MatinAbdelhadi AZPas encore d'évaluation
- SUJET. CONCOURS GÉNÉRAL DES MÉTIERS Maintenance Des Véhicules Automobiles. Option - Véhicules Particuliers. Épreuve Écrite. Épreuve D AdmissibilitéDocument15 pagesSUJET. CONCOURS GÉNÉRAL DES MÉTIERS Maintenance Des Véhicules Automobiles. Option - Véhicules Particuliers. Épreuve Écrite. Épreuve D Admissibilitémokzgalaxie67% (3)
- app8-TAPIS DE COURSEDocument12 pagesapp8-TAPIS DE COURSEfaroukPas encore d'évaluation
- Véhicule Electrique Pfe. Adnane Jaoui - Smain Labdouni. Pierre Delarue - Arnaud ChielensDocument22 pagesVéhicule Electrique Pfe. Adnane Jaoui - Smain Labdouni. Pierre Delarue - Arnaud Chielensyahiaoui adelPas encore d'évaluation
- CCP Tsi Si 2016eDocument30 pagesCCP Tsi Si 2016ekamalPas encore d'évaluation
- Etude de Cas Véhicule Hybride 2021Document22 pagesEtude de Cas Véhicule Hybride 2021Emmanuel CoulonPas encore d'évaluation
- 5-MCC Exos CorrDocument8 pages5-MCC Exos CorrAbou AboubakerPas encore d'évaluation
- Fiche TD2Document6 pagesFiche TD2Ромаисса Самед0% (1)
- Machines Et Entraînements Électriques: Keyhan SheshyekaniDocument41 pagesMachines Et Entraînements Électriques: Keyhan SheshyekaniMaha HammamiPas encore d'évaluation
- CNC Si Tsi Ge 2013Document15 pagesCNC Si Tsi Ge 2013AYMANE ESSOUIRIPas encore d'évaluation
- CH08 PDFDocument4 pagesCH08 PDFFarid AfifiPas encore d'évaluation
- BCG Spé SI Série SDocument13 pagesBCG Spé SI Série SChristophe MceTvPas encore d'évaluation
- 13 Dessin TechniqueDocument8 pages13 Dessin Techniquefouad abdelhamidPas encore d'évaluation
- TD Risques IndustrielsDocument2 pagesTD Risques IndustrielsAdam Chouma100% (1)
- Chap2 Interp 2Document24 pagesChap2 Interp 2Mohamed ChkailiPas encore d'évaluation
- PBE2021Document5 pagesPBE2021Adam ChoumaPas encore d'évaluation
- TD1 FondationsDocument1 pageTD1 FondationsAdam ChoumaPas encore d'évaluation
- CHAP1Document27 pagesCHAP1Adam ChoumaPas encore d'évaluation
- Cours GM M 1819Document53 pagesCours GM M 1819Adam ChoumaPas encore d'évaluation
- Chap3 IntégrationDocument14 pagesChap3 IntégrationAdam ChoumaPas encore d'évaluation
- Chap 4Document39 pagesChap 4Adam ChoumaPas encore d'évaluation
- 2017 Rapport TIPEDocument42 pages2017 Rapport TIPEAdam ChoumaPas encore d'évaluation
- TD1 Fiabilité IndustrielleDocument2 pagesTD1 Fiabilité IndustrielleAdam ChoumaPas encore d'évaluation
- TD-Ch1 Et 2Document2 pagesTD-Ch1 Et 2Adam ChoumaPas encore d'évaluation
- Emploi Du Temps 2GMS3 20Document1 pageEmploi Du Temps 2GMS3 20Adam ChoumaPas encore d'évaluation
- Cours Const Auto Octobre 2021Document37 pagesCours Const Auto Octobre 2021Adam ChoumaPas encore d'évaluation
- Cours Const Auto Octobre 2021Document37 pagesCours Const Auto Octobre 2021Adam ChoumaPas encore d'évaluation
- Mindmap - ISO 9001-2015Document1 pageMindmap - ISO 9001-2015Adam ChoumaPas encore d'évaluation
- 02 Les TurboreacteursDocument15 pages02 Les TurboreacteursAdam ChoumaPas encore d'évaluation
- Démarche QualitéDocument97 pagesDémarche QualitéAdam ChoumaPas encore d'évaluation
- PSI MathDocument148 pagesPSI MathAdam ChoumaPas encore d'évaluation
- TD3sujet PDFDocument5 pagesTD3sujet PDFYounes OumaimounPas encore d'évaluation
- Corp RapportDocument26 pagesCorp RapportChris 2La Novelle AlioncePas encore d'évaluation
- Sujet E51 2015Document21 pagesSujet E51 2015Wafa BouzidPas encore d'évaluation
- Swegon 0515 PDFDocument24 pagesSwegon 0515 PDFbermisuPas encore d'évaluation
- Roue Libre PDFDocument4 pagesRoue Libre PDFAbdelmajid AittalebPas encore d'évaluation
- TD MCCDocument6 pagesTD MCCabdeljalil chouikhPas encore d'évaluation
- Cours Chaines de Puissance 2015Document10 pagesCours Chaines de Puissance 2015semahPas encore d'évaluation
- TD Régulation Et Asservissement 2Document5 pagesTD Régulation Et Asservissement 2Ilyess HamdiPas encore d'évaluation
- Dx225lca FRDocument18 pagesDx225lca FRPoliana AvelarPas encore d'évaluation
- Table Élévatrice Etude BibliographiqueDocument12 pagesTable Élévatrice Etude BibliographiqueTNskill TNskillPas encore d'évaluation
- Ticemlal Fella Bouhaddi AminaDocument94 pagesTicemlal Fella Bouhaddi Aminaabdo charapoPas encore d'évaluation
- 6 Connaitre Les PictogrammeDocument26 pages6 Connaitre Les Pictogrammehariz harizPas encore d'évaluation
- Hadj Aissa KahlaouiDocument81 pagesHadj Aissa KahlaouiAhmed EllouzePas encore d'évaluation