Vous aimerez peut-être aussi
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- 0 T T T T T T: Cours MécaniqueDocument11 pages0 T T T T T T: Cours MécaniqueBelheziel AekPas encore d'évaluation
- Flexion SimpleDocument16 pagesFlexion SimpleKOTCHI kouadio FabricePas encore d'évaluation
- Chapitre4 5rdm Cisaillement TorsionDocument24 pagesChapitre4 5rdm Cisaillement TorsionJacques NdavaroPas encore d'évaluation
- Chapitre 6 - FlexionDocument14 pagesChapitre 6 - FlexionsalemPas encore d'évaluation
- Resusme RDM 2eme AnneeDocument22 pagesResusme RDM 2eme AnneejaberPas encore d'évaluation
- Rdmsollicitationsimple PDFDocument5 pagesRdmsollicitationsimple PDFSeloua El MouttaqiPas encore d'évaluation
- Assemblages Et Tribo - TriboDocument51 pagesAssemblages Et Tribo - TriboKorichiKarimPas encore d'évaluation
- Choix Et Selection-Des-Materiaux-CourDocument50 pagesChoix Et Selection-Des-Materiaux-CourSmail MendaciPas encore d'évaluation
- 02 Hypothèses de La RDM - Torseur de CohésionDocument13 pages02 Hypothèses de La RDM - Torseur de CohésionYounoussa TogoPas encore d'évaluation
- Acier 2020 - Chap 2Document68 pagesAcier 2020 - Chap 2Jaouad SAYKOUKPas encore d'évaluation
- Traction - Compression GC 2012Document13 pagesTraction - Compression GC 2012Soumaya MerimiPas encore d'évaluation
- 7-Mini Projet - Structures PorteusesDocument44 pages7-Mini Projet - Structures Porteusesahmed lagdaaPas encore d'évaluation
- 01 Elasticité LinéaireDocument43 pages01 Elasticité LinéaireHassan GuenzaouzPas encore d'évaluation
- Chapitre 5 Torsion SimpleDocument12 pagesChapitre 5 Torsion SimpleTech KingPas encore d'évaluation
- RDM 6Document11 pagesRDM 6Salma ZahidPas encore d'évaluation
- RDM - Chapitre 3 - Traction Simple Et Compression SimpleDocument10 pagesRDM - Chapitre 3 - Traction Simple Et Compression SimpleabdelallahPas encore d'évaluation
- Rev Resistance A La Fatigue en Soudage-1Document21 pagesRev Resistance A La Fatigue en Soudage-1Florian HonfinPas encore d'évaluation
- Exemef (1) rdm6Document56 pagesExemef (1) rdm6Karima DoctorantePas encore d'évaluation
- TD 4 FrottementDocument4 pagesTD 4 FrottementfoufouaPas encore d'évaluation
- Cours Dynamique CompletDocument18 pagesCours Dynamique CompletSofiene GuedriPas encore d'évaluation
- RDM Equation de La DéforméeDocument4 pagesRDM Equation de La DéforméeFilaliAbderrahim100% (1)
- Contraintes DeformationsDocument67 pagesContraintes Deformationslaila lailaPas encore d'évaluation
- Université Moulay Ismail Ecole Nationale Supérieure D'arts Et Métiers ENSAM-Meknès Département D'energétiqueDocument34 pagesUniversité Moulay Ismail Ecole Nationale Supérieure D'arts Et Métiers ENSAM-Meknès Département D'energétiqueYoussef ChfiriPas encore d'évaluation
- Chapitre 3-CisaillementDocument5 pagesChapitre 3-CisaillementDj'aaFer WafoPas encore d'évaluation
- Modele Elasto-PlastiqueDocument9 pagesModele Elasto-PlastiqueflinnmaxPas encore d'évaluation
- Chapitre 1 Tech-BaseDocument78 pagesChapitre 1 Tech-BaseMohamed AminePas encore d'évaluation
- CIV1150 4 TorsionDocument44 pagesCIV1150 4 TorsionRobert RobPas encore d'évaluation
- RDM CH5 Traction Simple Compression SimpleDocument21 pagesRDM CH5 Traction Simple Compression SimplesamarPas encore d'évaluation
- TD RDMDocument4 pagesTD RDMFrancis SonkengPas encore d'évaluation
- Matériaux de ConstructionDocument117 pagesMatériaux de Constructionjules osy tamwo watoPas encore d'évaluation
- Ansys CalculDocument144 pagesAnsys CalculKouadio Armel KoffiPas encore d'évaluation
- Exercice Corrigé de RDM Première Année PDFDocument11 pagesExercice Corrigé de RDM Première Année PDFKpangni SylverePas encore d'évaluation
- Partie-III Exercices Resolus TD Rayonnement Thermique-M1ermDocument8 pagesPartie-III Exercices Resolus TD Rayonnement Thermique-M1ermÔlá AchamouPas encore d'évaluation
- Présentation Du RapportDocument28 pagesPrésentation Du RapportFahmi chhiebiPas encore d'évaluation
- Présentation2 1Document46 pagesPrésentation2 1Mahamadou Makan DiakitéPas encore d'évaluation
- Cours Sciences Des Matériaux 2Document40 pagesCours Sciences Des Matériaux 2Laila AzzouziPas encore d'évaluation
- Essais MécaniqueDocument3 pagesEssais MécaniqueBoussalia LatifaPas encore d'évaluation
- 2022 2023 Les Ailettes COURS de Transfert de Chaleur ENSPDocument29 pages2022 2023 Les Ailettes COURS de Transfert de Chaleur ENSPThamar GomaPas encore d'évaluation
- Section 6 - 2019Aut-MEC2405 - Concentration de contrainte-PDF-No - VideoDocument36 pagesSection 6 - 2019Aut-MEC2405 - Concentration de contrainte-PDF-No - Videochebbi wissemePas encore d'évaluation
- Cours Choix Mat Mars 2020 PDFDocument62 pagesCours Choix Mat Mars 2020 PDFBassem SmatiPas encore d'évaluation
- TractionDocument9 pagesTractionmohamedPas encore d'évaluation
- Flexion PDFDocument6 pagesFlexion PDFBoud ElhassanPas encore d'évaluation
- Fluage TDDocument10 pagesFluage TDyassouraPas encore d'évaluation
- TP RDMDocument19 pagesTP RDMahmed belmadani100% (1)
- 9500 PDFDocument9 pages9500 PDFhidra bedhiafiPas encore d'évaluation
- Presentation Cast3MDocument92 pagesPresentation Cast3MThérence Lovel AngouéPas encore d'évaluation
- Essais Sur L'acier 2021dDocument67 pagesEssais Sur L'acier 2021dFisso Ben BenPas encore d'évaluation
- exo-PLASTICITE 1 PDFDocument30 pagesexo-PLASTICITE 1 PDFDjelloul ReziniPas encore d'évaluation
- Traction 2Document9 pagesTraction 2Boud ElhassanPas encore d'évaluation
- MN91Document95 pagesMN91Doria GhennaiPas encore d'évaluation
- RdmflexionDocument27 pagesRdmflexionqzm74l100% (1)
- Les Dislocations Au Niveau Des Materiaux MetalliquesDocument5 pagesLes Dislocations Au Niveau Des Materiaux MetalliquesYounes El-Bouznani100% (1)
- Cours TolerancesDocument18 pagesCours TolerancesGuiliassPas encore d'évaluation
- 3-Cotation Fonctionnelle ELDocument22 pages3-Cotation Fonctionnelle ELHoussem MOURADIPas encore d'évaluation
- RhéologieDocument34 pagesRhéologieAlexandre CiriezPas encore d'évaluation
- Meca ContactDocument45 pagesMeca ContactMeryem HadriPas encore d'évaluation
- RDM Chapitre 1Document6 pagesRDM Chapitre 1ibrim100% (1)
- 07 Flexion Simple - Modif CopieDocument15 pages07 Flexion Simple - Modif CopiemahdiPas encore d'évaluation
- ch6 - RDM MDRDocument16 pagesch6 - RDM MDRHossam BendaliPas encore d'évaluation
- Polycopie RDM 1 Licence 2 Genie Civil Harichan ZDocument138 pagesPolycopie RDM 1 Licence 2 Genie Civil Harichan ZAzertyu Kaoutit100% (1)
- Polycopie RDM 1 Licence 2 Genie Civil Harichan ZDocument138 pagesPolycopie RDM 1 Licence 2 Genie Civil Harichan ZAzertyu Kaoutit100% (1)
- B2chap1 CoursDocument11 pagesB2chap1 CoursRamzi MansouriPas encore d'évaluation
- CoursDocument41 pagesCoursAbdou ChawiPas encore d'évaluation
- Calcul FrettageDocument2 pagesCalcul FrettageMohamed Saidi50% (2)
- La Modelisation en GéotechniqueDocument33 pagesLa Modelisation en GéotechniqueDUBOISPas encore d'évaluation
- Memoir Fin D'etude Mehdi BESSAIHDocument166 pagesMemoir Fin D'etude Mehdi BESSAIHBADRA NOUR BOUABDALLAHPas encore d'évaluation
- TP RDM 2 FinaliserDocument22 pagesTP RDM 2 FinaliserMalek Ikram CHERAITPas encore d'évaluation
- Calcul de La FlècheDocument1 pageCalcul de La FlècheSm0ky KillPas encore d'évaluation
- Modélisation MMC Et Calcul de L'épaisseur (Critère de Von Mises)Document18 pagesModélisation MMC Et Calcul de L'épaisseur (Critère de Von Mises)taoufikloukilPas encore d'évaluation
- Cours de Mécanique Des Sols Et Exo MDS2 PDFDocument285 pagesCours de Mécanique Des Sols Et Exo MDS2 PDFMarouane Samadi100% (2)
- Chapitre III-Flexion Simple - BoisDocument29 pagesChapitre III-Flexion Simple - BoisCoumba thiawPas encore d'évaluation
- RésuméDocument82 pagesRésuméOussama BouzidPas encore d'évaluation
- 5 CisaillementDocument4 pages5 CisaillementAbderrazak Nassiri0% (1)
- Poutre 12Document11 pagesPoutre 12AS as100% (1)
- Etude Approfondie Dun Banc de Torsion Traction Presentation EnspsDocument12 pagesEtude Approfondie Dun Banc de Torsion Traction Presentation EnspsHairisPas encore d'évaluation
- CH2 Lignes DinfluenceDocument69 pagesCH2 Lignes DinfluenceHamid100% (1)
- Ms GC Dib+Zazoua PDFDocument130 pagesMs GC Dib+Zazoua PDFAbdarrahmaneArPas encore d'évaluation
- Chapitre 3-CMDocument25 pagesChapitre 3-CMnouhanPas encore d'évaluation
- RDM-CHAPITRE 1-2-Version BDocument25 pagesRDM-CHAPITRE 1-2-Version Bdark paldinPas encore d'évaluation
- Abderrahim LASSOUANI PDFDocument94 pagesAbderrahim LASSOUANI PDFKa Rim Jr.Pas encore d'évaluation
- Concevoir Et Construire en Acier PDFDocument114 pagesConcevoir Et Construire en Acier PDFSimohamed Laimairi0% (1)
- Mur en Beton ArmeDocument4 pagesMur en Beton ArmeSun GunesPas encore d'évaluation
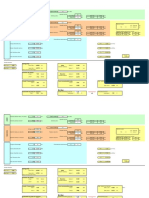
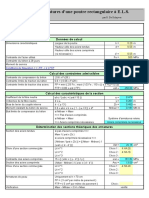
- POUTRE Rectangulaire en ELSDocument1 pagePOUTRE Rectangulaire en ELSHabibMoussaMohamedPas encore d'évaluation
- Comprtement Non LinDocument114 pagesComprtement Non LinFadwa El KhouPas encore d'évaluation
- CHAPITRE 5-Final - Résistance Normale À La FlexionDocument37 pagesCHAPITRE 5-Final - Résistance Normale À La FlexionbengalaPas encore d'évaluation
- Note de Calcul FinaleDocument38 pagesNote de Calcul FinaleLakhdarTaibiPas encore d'évaluation
- Poutre Sur Appuis Simples MaintenueDocument11 pagesPoutre Sur Appuis Simples MaintenueDiamonPas encore d'évaluation
- 0 Prise de ContactDocument8 pages0 Prise de ContactYoussef TalbiPas encore d'évaluation
- Etude Et Conception Dx27un Pont Dalle Oa8 Autoroute Gabes MedenineDocument91 pagesEtude Et Conception Dx27un Pont Dalle Oa8 Autoroute Gabes MedenineMustapha FejjiPas encore d'évaluation
- Exemple de Calcul NervureDocument25 pagesExemple de Calcul Nervuremax toledanoPas encore d'évaluation
- Calcul D'acrotèreDocument8 pagesCalcul D'acrotèreWarda JoryPas encore d'évaluation
- FC2017 Exam ElasDocument4 pagesFC2017 Exam ElasIbrahim BenaliPas encore d'évaluation
- 50 Exercices Corrigés Sur Les Ossatures (RDM)Document68 pages50 Exercices Corrigés Sur Les Ossatures (RDM)ham don100% (1)