Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Variation de Vitesse Des Moteurs Courant ContinuDocument18 pagesVariation de Vitesse Des Moteurs Courant ContinuBymohamedfb DrillerPas encore d'évaluation
- Variation de Vitesse Des Moteurs CourantDocument18 pagesVariation de Vitesse Des Moteurs CourantckrimyouPas encore d'évaluation
- Variation de Vitesse Des Moteurs Courant ContinuDocument18 pagesVariation de Vitesse Des Moteurs Courant ContinuPatrick DelsolPas encore d'évaluation
- Variation de Vitesse MCCDocument39 pagesVariation de Vitesse MCCMahdi El Marrakchi100% (1)
- COURS Electricité Industrielle 4et5Document32 pagesCOURS Electricité Industrielle 4et5Youcef KhelikaPas encore d'évaluation
- CHAP XI AlternateurDocument20 pagesCHAP XI AlternateurRaouia AOUINIPas encore d'évaluation
- ZaloumaDocument99 pagesZaloumasalim batoulPas encore d'évaluation
- Abde SslamDocument14 pagesAbde SslamNihad BouderbalaPas encore d'évaluation
- La Variation de VitesseDocument6 pagesLa Variation de Vitessenajim68Pas encore d'évaluation
- Chapitre1 Electrotechnique Cours 02Document4 pagesChapitre1 Electrotechnique Cours 02Îşl EmPas encore d'évaluation
- Chapitre 3 Generalites Sur Les Machines ElectriquesDocument31 pagesChapitre 3 Generalites Sur Les Machines ElectriquesanisPas encore d'évaluation
- Commande Électronique de Moteurs: Classification Des Convertisseurs StatiquesDocument25 pagesCommande Électronique de Moteurs: Classification Des Convertisseurs StatiquesHamza FeraPas encore d'évaluation
- CH1 Introduction A La Commande Des Machines Electriques A Courant ContinuDocument65 pagesCH1 Introduction A La Commande Des Machines Electriques A Courant ContinumarPas encore d'évaluation
- Cours Commande Des MachinesDocument40 pagesCours Commande Des MachinesyaoPas encore d'évaluation
- TP: Machine A Courant ContinueDocument9 pagesTP: Machine A Courant Continuerachid aekPas encore d'évaluation
- Commande Des MCC TD 1 Exo 1 Exo2 2Document9 pagesCommande Des MCC TD 1 Exo 1 Exo2 2Haroun AmirPas encore d'évaluation
- Machine CC PDFDocument11 pagesMachine CC PDFDriss SoulaimaniPas encore d'évaluation
- 5.cours MCCDocument29 pages5.cours MCCmajdoubPas encore d'évaluation
- IntroductionDocument6 pagesIntroductionAmIne OmdaPas encore d'évaluation
- Les Machines A Courant ContinuDocument10 pagesLes Machines A Courant ContinuakebayeriPas encore d'évaluation
- Les Machines A Courant ContinuDocument10 pagesLes Machines A Courant ContinuSamroura YessadPas encore d'évaluation
- TP1 Machines ElectriqueDocument7 pagesTP1 Machines ElectriqueKarima YousfiPas encore d'évaluation
- Chap1la Variation de Vitesse-2Document6 pagesChap1la Variation de Vitesse-2مفتاح الدينPas encore d'évaluation
- Commande Électronique Des Moteurs PDFDocument25 pagesCommande Électronique Des Moteurs PDFImpression HamidPas encore d'évaluation
- Chapitre6 MCCDocument11 pagesChapitre6 MCCmaroua belhadjPas encore d'évaluation
- MCCDocument4 pagesMCCIlhem FaresPas encore d'évaluation
- Cours Electromecanique MiniereDocument11 pagesCours Electromecanique MinieresouhaboumarafPas encore d'évaluation
- Machines A Courant AlternatifDocument4 pagesMachines A Courant AlternatifMohamed Yacine RachediPas encore d'évaluation
- Machines A Courant Alternatif PDFDocument4 pagesMachines A Courant Alternatif PDFHmz OussamaPas encore d'évaluation
- Rapport de ProjetDocument11 pagesRapport de ProjetFatima-zohra SoultanaPas encore d'évaluation
- Machine Synchrone PDFDocument10 pagesMachine Synchrone PDFayoumaaoui5100% (12)
- Moteur CCDocument10 pagesMoteur CCMohamed MouchrifPas encore d'évaluation
- Variation de Vitesse Des Moteurs Courant ContinuDocument18 pagesVariation de Vitesse Des Moteurs Courant Continuben boubaker100% (1)
- Cours - Machines À Courant ContinuDocument11 pagesCours - Machines À Courant ContinuNasit Mohammed100% (1)
- Généralités Machines ÉlectriquesDocument25 pagesGénéralités Machines ÉlectriquesAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- 5-MCC Corr PDFDocument8 pages5-MCC Corr PDFAbdenour BenhalimaPas encore d'évaluation
- MCCB PDFDocument6 pagesMCCB PDFzainabPas encore d'évaluation
- Général It ÉDocument8 pagesGénéral It Éam rianoPas encore d'évaluation
- Ass Mach Conv 1erchpDocument11 pagesAss Mach Conv 1erchpamine milanoPas encore d'évaluation
- OnduleurDocument23 pagesOnduleurSalahBenMohammedHaddadji100% (1)
- Cours - Conversion - Denergie - C - Copie 0 - CopieDocument23 pagesCours - Conversion - Denergie - C - Copie 0 - CopieJe suis Je suisPas encore d'évaluation
- La Variation de Vitesse - TechnologieDocument6 pagesLa Variation de Vitesse - TechnologiehichamPas encore d'évaluation
- Energieplus-Lesite - Be-Moteur À Courant ContinuDocument8 pagesEnergieplus-Lesite - Be-Moteur À Courant ContinubopendapPas encore d'évaluation
- Cours MCCDocument17 pagesCours MCCMak HimPas encore d'évaluation
- Chapitre IDocument14 pagesChapitre IFAROUK SADEKPas encore d'évaluation
- Bac S Si Machines Courant ContinuDocument11 pagesBac S Si Machines Courant ContinuWiam KhettabPas encore d'évaluation
- Machines À Courant Continu-2Document42 pagesMachines À Courant Continu-2cmpf0021Pas encore d'évaluation
- Les Machines A Courant ContinuDocument10 pagesLes Machines A Courant ContinuEpsp MedPas encore d'évaluation
- Techniques de La Commande ÉlectriqueDocument44 pagesTechniques de La Commande ÉlectriqueAli MEDJGHOU100% (1)
- Série de TD N°5: Module: Electrotechnique 1Document2 pagesSérie de TD N°5: Module: Electrotechnique 1Maguette SeckPas encore d'évaluation
- QCM 1Document3 pagesQCM 1Leroy Lionel Sonfack100% (2)
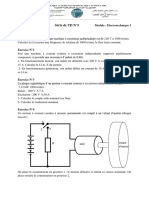
- MCC Et TDDocument18 pagesMCC Et TDDame GayePas encore d'évaluation
- La Machine À Courant Continu: GénéralitésDocument13 pagesLa Machine À Courant Continu: Généralitésouadah mohamedPas encore d'évaluation
- Le Moteur À Courant Continu À Aimants PermanentsDocument8 pagesLe Moteur À Courant Continu À Aimants PermanentsJAMEL CHAKCHAK100% (2)
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- QCM Sur Les ComplexesDocument9 pagesQCM Sur Les ComplexesFranck Olivier TuoPas encore d'évaluation
- Expose Alimentation A DecoupageDocument18 pagesExpose Alimentation A DecoupageFabrice Bomnou100% (4)
- Série N°1 E2 Magnétotatique 2020-2021 SMP-S3 A. SALIDocument3 pagesSérie N°1 E2 Magnétotatique 2020-2021 SMP-S3 A. SALIhero jassim100% (1)
- Caractéristique D'un Dipôle Actif Web ModifiéDocument11 pagesCaractéristique D'un Dipôle Actif Web ModifiéRihab ARBANEPas encore d'évaluation
- SOUTENANCEDocument22 pagesSOUTENANCEErnest Bakouta100% (1)
- Tpe TmiDocument5 pagesTpe TmiChourouk MeskiniPas encore d'évaluation
- Bilan Thermique de Construction - Etude D Un Cas Et Présentation de SolutionsDocument185 pagesBilan Thermique de Construction - Etude D Un Cas Et Présentation de SolutionsImad100% (1)
- Reviser Son Bac Avec Le Monde PHYSIQUE-CHIMIE PDFDocument114 pagesReviser Son Bac Avec Le Monde PHYSIQUE-CHIMIE PDFsebastien_houee100% (4)
- Exercices Moment D Une Force Par Rapport A Un Axe de Rotation CapDocument4 pagesExercices Moment D Une Force Par Rapport A Un Axe de Rotation CapIdrissa KouyatéPas encore d'évaluation
- MP PHYSIQUE MINES 2 2007.enonceDocument6 pagesMP PHYSIQUE MINES 2 2007.enonceAnass TakfaPas encore d'évaluation
- Tarifs Basse TensionDocument1 pageTarifs Basse Tensionkeusra germain zrakpaPas encore d'évaluation
- Procédure:: Justification Des ChoixDocument5 pagesProcédure:: Justification Des ChoixAHMED LEBBARPas encore d'évaluation
- B-13-1 - PE0101 - Note de Calcul Mécanique Convoyeur CL7' - MEC31301 - 00 - 20151101Document28 pagesB-13-1 - PE0101 - Note de Calcul Mécanique Convoyeur CL7' - MEC31301 - 00 - 20151101Akram FerchichiPas encore d'évaluation
- Ilovepdf Merged-2Document114 pagesIlovepdf Merged-2Hiba ElbhiouiPas encore d'évaluation
- ThermodynamiqueDocument22 pagesThermodynamiquefast2feriousPas encore d'évaluation
- Cours ReferenceDocument42 pagesCours ReferencelifekingPas encore d'évaluation
- Fasicule TP - SMP-S5 - Mec. Analytq Et Vib (2023-2024) - PR A. REZZOUKDocument40 pagesFasicule TP - SMP-S5 - Mec. Analytq Et Vib (2023-2024) - PR A. REZZOUKSamahi Fatima ZahraPas encore d'évaluation
- Exercices ElectrostatiqueDocument13 pagesExercices ElectrostatiqueChehhat AbdelmadjidPas encore d'évaluation
- Tpe 1 2021-22Document5 pagesTpe 1 2021-22bhbancPas encore d'évaluation
- MX24 5-LanguageDocument74 pagesMX24 5-LanguagedesbierresPas encore d'évaluation
- CourDocument110 pagesCourFATINE BOUKEBBOUPas encore d'évaluation
- Devoir de Contrôle N°2 - Physique - 1ère AS (2012-2013) MR Dhaoui YOUNSIDocument3 pagesDevoir de Contrôle N°2 - Physique - 1ère AS (2012-2013) MR Dhaoui YOUNSIrkm100% (1)
- Chapitre 4 Protection Des PersonnesDocument6 pagesChapitre 4 Protection Des Personnesعبد الله إبن عباسPas encore d'évaluation
- CC 1 - 4 S2 PC 2bac (WWW - Pc1.ma)Document4 pagesCC 1 - 4 S2 PC 2bac (WWW - Pc1.ma)AMPas encore d'évaluation
- 1 Chapitre-01Document25 pages1 Chapitre-01Mourad CherabrabPas encore d'évaluation
- 4/16 VVVF: Argani GearsDocument6 pages4/16 VVVF: Argani GearsYiannis ToufexisPas encore d'évaluation
- Determination D Une Quantite de Matiere - Evaluation Experimentale - 2ndeISIDocument10 pagesDetermination D Une Quantite de Matiere - Evaluation Experimentale - 2ndeISIJimingot jamsPas encore d'évaluation
- Economisons L'énergie (Trace Écrite)Document3 pagesEconomisons L'énergie (Trace Écrite)ak.s.a.nPas encore d'évaluation
- Serie 8 LC LibreDocument5 pagesSerie 8 LC LibrehamziPas encore d'évaluation