Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Manga FrenchDocument23 pagesManga FrenchLaurent Ferry SiégniPas encore d'évaluation
- Adresse IPv4Document12 pagesAdresse IPv4Fifi FifitaPas encore d'évaluation
- DS Micromoteur - Compresseur Clim CORRDocument1 pageDS Micromoteur - Compresseur Clim CORRAdil Hassani IdrissiPas encore d'évaluation
- DevoirDocument2 pagesDevoirIhssan KH100% (1)
- Mise À La Terre D'une Installation Électrique, Norme NF C 15-100Document8 pagesMise À La Terre D'une Installation Électrique, Norme NF C 15-100Med Habib AitPas encore d'évaluation
- A1TDS22 TD3 Suite CorrigéDocument10 pagesA1TDS22 TD3 Suite CorrigéBoualem MestafaPas encore d'évaluation
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueAhmed fattoumPas encore d'évaluation
- 1 - Cours Réseaux PDFDocument11 pages1 - Cours Réseaux PDFMiguel Clovis KamPas encore d'évaluation
- 2843612136Document8 pages2843612136Hanina mamiPas encore d'évaluation
- Schenck Intecont Plus Weighfeeder Manual PDFDocument87 pagesSchenck Intecont Plus Weighfeeder Manual PDFANDREY79% (19)
- 152 Pince Ericc3 Version2Document2 pages152 Pince Ericc3 Version2Faical BharPas encore d'évaluation
- 152 Pince Ericc3 Version2Document2 pages152 Pince Ericc3 Version2Chaymae OuahmanePas encore d'évaluation
- 152 2 Pince Ericc3 Version2 CorrigeDocument2 pages152 2 Pince Ericc3 Version2 CorrigeChaymae OuahmanePas encore d'évaluation
- CC 2Document6 pagesCC 2Qitai WEIPas encore d'évaluation
- Synthese 2007-2008Document9 pagesSynthese 2007-2008HamidPas encore d'évaluation
- Examen 4 Algèbre 1Document2 pagesExamen 4 Algèbre 1أرشيد محمدPas encore d'évaluation
- 910 2Bm National 2013 Ss2 EnoncéDocument3 pages910 2Bm National 2013 Ss2 EnoncéYsr QuantPas encore d'évaluation
- SR 2009Document3 pagesSR 2009Mehdi OugriPas encore d'évaluation
- TD3 Modelisation EX 5 (Corrigé)Document4 pagesTD3 Modelisation EX 5 (Corrigé)Iheb JallouzPas encore d'évaluation
- ExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesDocument77 pagesExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesTàHa SamihPas encore d'évaluation
- Corrigé Concours Blanc N°1 - 23-24Document3 pagesCorrigé Concours Blanc N°1 - 23-24yasser bhPas encore d'évaluation
- CNC Si MP 2009 CG PDFDocument14 pagesCNC Si MP 2009 CG PDFJassir AmgroudPas encore d'évaluation
- Chap 16Document10 pagesChap 16Œū Ssa MēPas encore d'évaluation
- Examen 5 Algèbre 1Document2 pagesExamen 5 Algèbre 1أرشيد محمدPas encore d'évaluation
- 208 Prehenseur CorrigeDocument4 pages208 Prehenseur CorrigeAhmed TalsiPas encore d'évaluation
- Correction 2010 NorDocument6 pagesCorrection 2010 NorMoulham KhalidPas encore d'évaluation
- CNC 2011 CorrigéDocument23 pagesCNC 2011 CorrigéImad NAKHI100% (1)
- Serie 01 L2Document3 pagesSerie 01 L2Mouna BoumezbeurPas encore d'évaluation
- TD1 RegulationDocument10 pagesTD1 RegulationHifdi AyaPas encore d'évaluation
- 921 2Bm National 2008 Ss1 EnoncéDocument3 pages921 2Bm National 2008 Ss1 EnoncéBouzkri BOUZKRIPas encore d'évaluation
- TD 02 Les Espaces VectorielsDocument2 pagesTD 02 Les Espaces VectorielsMadjid ChaouchePas encore d'évaluation
- j1 127 2 TD EmbrayageDocument2 pagesj1 127 2 TD EmbrayageFaical BharPas encore d'évaluation
- TD 1 Correction - 1Document6 pagesTD 1 Correction - 1Soufiane Frahtia30Pas encore d'évaluation
- CNC Si MP 2011 CGDocument23 pagesCNC Si MP 2011 CGAyoub LeaziziPas encore d'évaluation
- Rattrapage Année 2001-2002Document2 pagesRattrapage Année 2001-2002mimaPas encore d'évaluation
- FeuilleReduction 2Document4 pagesFeuilleReduction 2Rose PatchouPas encore d'évaluation
- DS N°4 22-23 Du 20-02-2023OKDocument2 pagesDS N°4 22-23 Du 20-02-2023OKmangamanaPas encore d'évaluation
- Série de Physique Thème: Dipôle RL+ Circuit RLC Amorti Exercice N°1Document2 pagesSérie de Physique Thème: Dipôle RL+ Circuit RLC Amorti Exercice N°1Amine AlaoUii AlaouiPas encore d'évaluation
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueNour Allah tabibPas encore d'évaluation
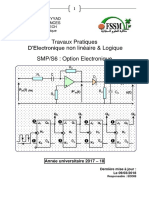
- Poly TP SMP S6 2018Document41 pagesPoly TP SMP S6 2018ANAS ETTANANIAPas encore d'évaluation
- Eléments de Corrigé - DS2 - 1TSI3 - 23-24 - VFDocument4 pagesEléments de Corrigé - DS2 - 1TSI3 - 23-24 - VFyasser bhPas encore d'évaluation
- Serie3 Algèbre MatriceDocument2 pagesSerie3 Algèbre MatriceKhalil LakhlifiPas encore d'évaluation
- c02 TD Determiner Les Lois de Pilotage en MouvementDocument28 pagesc02 TD Determiner Les Lois de Pilotage en MouvementLoic GomaPas encore d'évaluation
- Exercice 1Document3 pagesExercice 1hanane aissaoui0% (1)
- Chapitre2 Robotique 2017Document28 pagesChapitre2 Robotique 2017askaricePas encore d'évaluation
- 4 TD1Document1 page4 TD1MOHAMMED AMINE EL ANSARYPas encore d'évaluation
- 4 TD1 PDFDocument1 page4 TD1 PDFeslem amorPas encore d'évaluation
- 4 TD1 PDFDocument1 page4 TD1 PDFSafaePas encore d'évaluation
- 4 TD2221Document1 page4 TD2221Mahmoud Handase35Pas encore d'évaluation
- 4 TD1Document1 page4 TD1MOHAMMED AMINE EL ANSARYPas encore d'évaluation
- 4 TD1 PDFDocument1 page4 TD1 PDFdhouhaPas encore d'évaluation
- 4 TD1Document1 page4 TD1MOHAMMED AMINE EL ANSARYPas encore d'évaluation
- FeuilleCourbes 2Document4 pagesFeuilleCourbes 2fwhyPas encore d'évaluation
- Prep 1-19Document1 pagePrep 1-19yassine elmakssoudPas encore d'évaluation
- Série 4 Diode À JonctionDocument2 pagesSérie 4 Diode À Jonctionamina bassouPas encore d'évaluation
- $examen Final S1 UM6PDocument5 pages$examen Final S1 UM6PIchrak madromiPas encore d'évaluation
- Devoir Du 3 Eme TRI 2 MathsDocument1 pageDevoir Du 3 Eme TRI 2 MathsSkiizy TuToPas encore d'évaluation
- Ts Serie01 2024Document5 pagesTs Serie01 2024rayanmakran2Pas encore d'évaluation
- Cfao 3 CaoDocument7 pagesCfao 3 Caocasanova casanovaPas encore d'évaluation
- CC AlgèbreDocument11 pagesCC AlgèbreClaude Francois AssePas encore d'évaluation
- s2 Math2015Document3 pagess2 Math2015Joséphine NancassePas encore d'évaluation
- Sujet 2Document2 pagesSujet 2Queren AhuiPas encore d'évaluation
- TSS ds1 2022Document2 pagesTSS ds1 2022omaima saadPas encore d'évaluation
- Bac Blanc (Lycée Pilote Karouan) - Mathématiques - Bac Math (2007-2008)Document5 pagesBac Blanc (Lycée Pilote Karouan) - Mathématiques - Bac Math (2007-2008)Seif Souid100% (2)
- 2 Problèmes Corrigé MagnétostatiqueDocument23 pages2 Problèmes Corrigé MagnétostatiqueMiguel Clovis KamPas encore d'évaluation
- 03 - Methode Du Pivot de Gauss Pages 1 A 4Document4 pages03 - Methode Du Pivot de Gauss Pages 1 A 4Miguel Clovis KamPas encore d'évaluation
- CCP 2014 Langues Vivantes ObligatoireDocument15 pagesCCP 2014 Langues Vivantes ObligatoireMiguel Clovis KamPas encore d'évaluation
- CNC MP 2001 Sii EpreuveDocument18 pagesCNC MP 2001 Sii EpreuveMiguel Clovis KamPas encore d'évaluation
- 02 - Newton PDFDocument4 pages02 - Newton PDFMiguel Clovis KamPas encore d'évaluation
- 143 1 Complements PDFDocument6 pages143 1 Complements PDFMiguel Clovis KamPas encore d'évaluation
- Devoir 15 Analyse Numerique Epreuve PDFDocument1 pageDevoir 15 Analyse Numerique Epreuve PDFMiguel Clovis KamPas encore d'évaluation
- 150 3 Corccinp2019 Partiii PDFDocument3 pages150 3 Corccinp2019 Partiii PDFMiguel Clovis KamPas encore d'évaluation
- TDEspacesVectoriels PDFDocument4 pagesTDEspacesVectoriels PDFMiguel Clovis KamPas encore d'évaluation
- Cours Outils Mathematiques Pour La MecaniqueDocument27 pagesCours Outils Mathematiques Pour La MecaniqueMiguel Clovis KamPas encore d'évaluation
- 143 5 Transmission Des Donnees Numeriques PDFDocument12 pages143 5 Transmission Des Donnees Numeriques PDFMiguel Clovis KamPas encore d'évaluation
- Cours Cinematique Du ContactDocument2 pagesCours Cinematique Du ContactMiguel Clovis Kam100% (1)
- Centrale Supelec MP 2012 Maths 2 EpreuveDocument4 pagesCentrale Supelec MP 2012 Maths 2 EpreuveMiguel Clovis KamPas encore d'évaluation
- La - Salle - Chap1 - Cours - Optique - Physique V2019-20 PDFDocument20 pagesLa - Salle - Chap1 - Cours - Optique - Physique V2019-20 PDFMiguel Clovis KamPas encore d'évaluation
- Centrale Supelec MP 2000 Maths 1 EpreuveDocument5 pagesCentrale Supelec MP 2000 Maths 1 EpreuveMiguel Clovis KamPas encore d'évaluation
- Francais Texte RestaurantDocument1 pageFrancais Texte RestaurantJosefina García OsorioPas encore d'évaluation
- Devoir PatrimoineDocument2 pagesDevoir PatrimoineWalid MostefaouiPas encore d'évaluation
- 01 - Introduction Aux Reseaux de NeuronesDocument61 pages01 - Introduction Aux Reseaux de NeuronesDOTSYS DevPas encore d'évaluation
- Déterminants de La Diversification Des Exportations en Algérie - Une Analyse EmpiriqueDocument23 pagesDéterminants de La Diversification Des Exportations en Algérie - Une Analyse EmpiriqueNassim Keddari0% (1)
- Essentage ArdoiseDocument4 pagesEssentage ArdoisechristianperesPas encore d'évaluation
- Fip 200 R00 AqhseDocument2 pagesFip 200 R00 AqhseBitsindouPas encore d'évaluation
- Info - Express N°04Document2 pagesInfo - Express N°04Walid Ben AmirPas encore d'évaluation
- Item 334 - Angor Chronique StableDocument5 pagesItem 334 - Angor Chronique Stableabdele.adelPas encore d'évaluation
- Travaux Pratiques !Document12 pagesTravaux Pratiques !Kaoutar SalamPas encore d'évaluation
- Exemple Clous Et EpinglesDocument1 pageExemple Clous Et EpinglescahowenPas encore d'évaluation
- Freies Handbuch CH Retail FRDocument36 pagesFreies Handbuch CH Retail FRHyacinthe DahoPas encore d'évaluation
- ST T46-P46Document12 pagesST T46-P46mohamed0167Pas encore d'évaluation
- Bus M 2016 Brahimi Aghilas PDFDocument207 pagesBus M 2016 Brahimi Aghilas PDFhana tiPas encore d'évaluation
- Correction Ro Efb Mai 2014Document5 pagesCorrection Ro Efb Mai 2014Mohamed AssadPas encore d'évaluation
- ST4617272Document3 pagesST4617272Guer RiePas encore d'évaluation
- Systèmes Ongrid Pour Les Industriels Raccordés en Moyenne Tension - 2Document111 pagesSystèmes Ongrid Pour Les Industriels Raccordés en Moyenne Tension - 2nabil basbousPas encore d'évaluation
- Transistors BipolairesDocument17 pagesTransistors Bipolaireskouassinehemie320Pas encore d'évaluation
- Analyse 3Document25 pagesAnalyse 3Kenny GayakpaPas encore d'évaluation
- Compo 11sce LMBEY 2014-2015Document3 pagesCompo 11sce LMBEY 2014-2015Oumar TraoréPas encore d'évaluation
- Clinique SSR Bellefontaine NancyDocument2 pagesClinique SSR Bellefontaine NancySonia GonzalezPas encore d'évaluation
- Manuelzodiac-3 22Document36 pagesManuelzodiac-3 22YAN VICAIREPas encore d'évaluation
- 2.fungi Cours JPM 2006 JpegDocument39 pages2.fungi Cours JPM 2006 JpegNoor GhPas encore d'évaluation
- TP2 Filtrage NumeriqueDocument25 pagesTP2 Filtrage NumeriqueG POWERPas encore d'évaluation
- Satellite Photogrammetry CompletDocument25 pagesSatellite Photogrammetry CompletCesard AberiPas encore d'évaluation