Vous aimerez peut-être aussi
- Devoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineDocument8 pagesDevoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineYoussef Cherni100% (1)
- Devoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineDocument8 pagesDevoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineYoussef Cherni100% (1)
- DC2 Bras Manipulateur PDFDocument8 pagesDC2 Bras Manipulateur PDFMohamed Adem GhorbelPas encore d'évaluation
- Devoir de Synthèse N°1 Système de Tronçonnage 2s4 2015-2016Document7 pagesDevoir de Synthèse N°1 Système de Tronçonnage 2s4 2015-2016عبد السميع بوعينPas encore d'évaluation
- PFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFDocument98 pagesPFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFMouad BottePas encore d'évaluation
- Ce Document A Été Mis en Ligne Par Le Canopé de L'académie de Montpellier Pour La Base Nationale Des Sujets D'examens de L'enseignement ProfessionnelDocument10 pagesCe Document A Été Mis en Ligne Par Le Canopé de L'académie de Montpellier Pour La Base Nationale Des Sujets D'examens de L'enseignement ProfessionnelMed Ali MaatougPas encore d'évaluation
- TEST - Elements de Machines - 2023-Laem2Document2 pagesTEST - Elements de Machines - 2023-Laem2Khaled GammoudiPas encore d'évaluation
- Série 3 Et Solution - Etau Porte Tube 1Document8 pagesSérie 3 Et Solution - Etau Porte Tube 1imad boussPas encore d'évaluation
- Mémoire Bouzidi Et DerraouiDocument72 pagesMémoire Bouzidi Et Derraouihouyam hamdiPas encore d'évaluation
- Interpretes Assermentes 04102017Document6 pagesInterpretes Assermentes 04102017Atef JenhaniPas encore d'évaluation
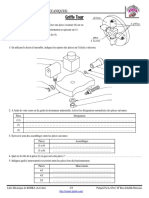
- Griffe de Tour PDFDocument3 pagesGriffe de Tour PDFAdramé AdraméPas encore d'évaluation
- BEP - ET - Poitiers - 1998 - Page 3 - 4 - PRDocument2 pagesBEP - ET - Poitiers - 1998 - Page 3 - 4 - PRNassim Rabaoui100% (1)
- TFM Technologie Professionnelle EFM REGIONAL 2020-2021 v2Document3 pagesTFM Technologie Professionnelle EFM REGIONAL 2020-2021 v2badr hadriPas encore d'évaluation
- Devoir 3 Modele 3 Si 2 Bac SM B Semestre 1Document13 pagesDevoir 3 Modele 3 Si 2 Bac SM B Semestre 1lemsouguerPas encore d'évaluation
- Prepartion À La Fabrication FinaleDocument31 pagesPrepartion À La Fabrication FinaleAhlem DhahriPas encore d'évaluation
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- TP6ou4ou5 Vérin ParaboleDocument5 pagesTP6ou4ou5 Vérin ParaboleWoupidos 天Pas encore d'évaluation
- RAPPORT TP PICos18 G6 LASRI OULAASRIDocument28 pagesRAPPORT TP PICos18 G6 LASRI OULAASRIYassine OULAASRIPas encore d'évaluation
- 4 Robot de Soudage1Document10 pages4 Robot de Soudage1karima atik100% (1)
- Contarainte D'antérioritéDocument16 pagesContarainte D'antérioritéMajed NesrinePas encore d'évaluation
- DS1 1Document11 pagesDS1 1Wissal GuilloulPas encore d'évaluation
- (PDF) Maintenance Et Réparation D'un Tour Parallèle - Islam Guezaout - Academia - EduDocument114 pages(PDF) Maintenance Et Réparation D'un Tour Parallèle - Islam Guezaout - Academia - EduSalim DoumbiaPas encore d'évaluation
- TN06 PDFDocument34 pagesTN06 PDFMa HdiPas encore d'évaluation
- 5 CorrigDocument11 pages5 Corrigjuliette ravinetPas encore d'évaluation
- DeoirDocument6 pagesDeoirbasmaPas encore d'évaluation
- Correction-Devoir de Synthese N2-Voiture Pour enfants-2016-2TIDocument4 pagesCorrection-Devoir de Synthese N2-Voiture Pour enfants-2016-2TInassirPas encore d'évaluation
- VE Reglable TD PDFDocument4 pagesVE Reglable TD PDFMohammed BouchelarmPas encore d'évaluation
- TD N°5 CaoiiDocument1 pageTD N°5 Caoiielking gingstarsPas encore d'évaluation
- 1er Serie Exercices - Sollicitations ComposéesDocument10 pages1er Serie Exercices - Sollicitations Composéesalamine.guerbai95Pas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiDocument4 pagesDevoir de Contrôle N°1 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiGassoumi WalidPas encore d'évaluation
- 5016 PDFDocument62 pages5016 PDFMeryem BerrPas encore d'évaluation
- 111 Dessin Industriel Normes ISO ANSI Rappel 2 PDFDocument46 pages111 Dessin Industriel Normes ISO ANSI Rappel 2 PDFAymen HssainiPas encore d'évaluation
- Ali Ahmed, Syriane Hadid, Ahmed AttentionDocument109 pagesAli Ahmed, Syriane Hadid, Ahmed AttentionHana HosniPas encore d'évaluation
- Exercice Etau Pour MVDocument2 pagesExercice Etau Pour MVYoussef YouriPas encore d'évaluation
- Sujet - Lève Personne - ÉlèveDocument10 pagesSujet - Lève Personne - ÉlèveremivsnPas encore d'évaluation
- Vérin de Sertissage Actions Pression Et RessortDocument3 pagesVérin de Sertissage Actions Pression Et RessortNelly Paganessi0% (2)
- Devoir 3 Modele 5 Si 2 Bac SM B Semestre 1Document16 pagesDevoir 3 Modele 5 Si 2 Bac SM B Semestre 1lemsouguer100% (1)
- Contole2 Usinage ComplexeDocument1 pageContole2 Usinage ComplexeMOHAM BELHOUDA100% (1)
- (Edm) (TD) Chaise D EscalierDocument2 pages(Edm) (TD) Chaise D EscalierJunior KamdemPas encore d'évaluation
- Copie FinaleDocument120 pagesCopie Finalezehii ghofranPas encore d'évaluation
- Projet Fin D'étudeDocument28 pagesProjet Fin D'étudeHajar OumnasPas encore d'évaluation
- Chap 5. EXECUTION GRAPHIQUE DE LA COTATIONDocument12 pagesChap 5. EXECUTION GRAPHIQUE DE LA COTATIONKONAN Yao AnicetPas encore d'évaluation
- Compilation - Plan Mobiliers ScolairesDocument13 pagesCompilation - Plan Mobiliers ScolairesEMMANUEL NGAMENIPas encore d'évaluation
- Application V :coupe SimpleDocument2 pagesApplication V :coupe Simplesamsoum20042952Pas encore d'évaluation
- TD La Commande Numerique Des Machines OutilsDocument2 pagesTD La Commande Numerique Des Machines OutilsWilliam DechangPas encore d'évaluation
- Cours Designation Des Materiaux Fiche 2 eDocument2 pagesCours Designation Des Materiaux Fiche 2 eGuy EffaPas encore d'évaluation
- Examen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFDocument9 pagesExamen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFmabroukPas encore d'évaluation
- Gamme D'usinageDocument7 pagesGamme D'usinageSawssen GuidaraPas encore d'évaluation
- Sujet 3 PDFDocument5 pagesSujet 3 PDFMohamed Snoussi0% (1)
- 9595 E2 Bac Pro Microtechniques 2016 Partie 2 Dossier Technique Et RessourceDocument6 pages9595 E2 Bac Pro Microtechniques 2016 Partie 2 Dossier Technique Et RessourceHadi Ben SaïdPas encore d'évaluation
- DT Sujer 10Document3 pagesDT Sujer 10Elafif HamdiPas encore d'évaluation
- PMOCN Doc ÉleveDocument16 pagesPMOCN Doc Élevedayzen jiffPas encore d'évaluation
- Ds 2 15-16Document4 pagesDs 2 15-16Otman Oto100% (1)
- LectureDocument4 pagesLectureRahma BaccarPas encore d'évaluation
- M21 Marocetude - Com Mathematiques Et Mecanique appliquee-FM-TSMFMDocument63 pagesM21 Marocetude - Com Mathematiques Et Mecanique appliquee-FM-TSMFMNoureddine MansourPas encore d'évaluation
- Torseurs PDFDocument6 pagesTorseurs PDFSadok ElaibaPas encore d'évaluation
- SMB NormalDocument12 pagesSMB NormalMohamed ChaerPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique Poste Automatique de Perçage - 3ème Technique (2011-2012) MR Raouafi AbdallahDocument4 pagesDevoir de Synthèse N°1 - Génie Électrique Poste Automatique de Perçage - 3ème Technique (2011-2012) MR Raouafi Abdallahmohamed ben nouijiPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE TROCONNAGE AUTOMATIQUE DES BARRES - Bac Technique (2017-2018) MR MR GHORBEL MamdouhDocument7 pagesDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE TROCONNAGE AUTOMATIQUE DES BARRES - Bac Technique (2017-2018) MR MR GHORBEL MamdouhDhia Cherni0% (1)
- Devoir de Contrôle N°1 - Technologie - MACHINE DE PRODUCTION DU CAF E CHAUD - 3ème Technique (2017-2018) MR GHORBEL MamdouhDocument7 pagesDevoir de Contrôle N°1 - Technologie - MACHINE DE PRODUCTION DU CAF E CHAUD - 3ème Technique (2017-2018) MR GHORBEL MamdouhakouPas encore d'évaluation
- Devoir de Contrôle N°2 Génie Mécanique Bras Manipulateur 2017 2018 (Ghorbel Mamdouh)Document8 pagesDevoir de Contrôle N°2 Génie Mécanique Bras Manipulateur 2017 2018 (Ghorbel Mamdouh)dayzen jiffPas encore d'évaluation
- Suppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurD'EverandSuppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurPas encore d'évaluation
- Cours Génie Mécanique Cotation Fonctionnelle 2018 2019 (Dhifaoui Abdelwaheb) PDFDocument9 pagesCours Génie Mécanique Cotation Fonctionnelle 2018 2019 (Dhifaoui Abdelwaheb) PDFanissPas encore d'évaluation
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 2010 2011 (Abdallah Raouafi)Document4 pagesDevoir de Synthèse N°1 2010 2011 (Abdallah Raouafi)Youssef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Taher Elhaded El Hamma)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Taher Elhaded El Hamma)Youssef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Document4 pagesDevoir de Synthèse N°1 2011 2012 (Abdallah Raouafi)Youssef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 2012 2013 (Dhahri Salah)Document6 pagesDevoir de Synthèse N°1 2012 2013 (Dhahri Salah)Youssef CherniPas encore d'évaluation
- Devoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiDocument10 pagesDevoir de Contrôle N°2 - Génie Mécanique - Machine À Pain - 3ème Technique (2016-2017) MR JEMAI LotfiYoussef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Document7 pagesDevoir de Synthèse N°1 2009 2010 (Ramzi Jellili)Youssef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 2013 2014 (Abdallah Raouafi)Document4 pagesDevoir de Synthèse N°1 2013 2014 (Abdallah Raouafi)Youssef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible - 3ème Technique (2011-2012) MR Hamdi DTDocument5 pagesDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible - 3ème Technique (2011-2012) MR Hamdi DTYoussef CherniPas encore d'évaluation
- P A P P: Oste Utomatique de Einture de ArabolesDocument15 pagesP A P P: Oste Utomatique de Einture de ArabolesYoussef CherniPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible - 3ème Technique (2011-2012) MR Hamdi DTDocument5 pagesDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible - 3ème Technique (2011-2012) MR Hamdi DTYoussef CherniPas encore d'évaluation
- 5-Fonction Digamma CorrectionDocument10 pages5-Fonction Digamma Correctionfrançois dupontPas encore d'évaluation
- Lexique - Axes-EspagnolDocument1 pageLexique - Axes-EspagnollaurePas encore d'évaluation
- Le Probleme de La Methode Dans La Philos-2Document155 pagesLe Probleme de La Methode Dans La Philos-2slim tobePas encore d'évaluation
- ISSN 2352-9962 دﺪﻌﻟا ﻊﺑﺎﺴﻟا ـ ناﻮﺟ 2017Document16 pagesISSN 2352-9962 دﺪﻌﻟا ﻊﺑﺎﺴﻟا ـ ناﻮﺟ 2017Maria BouberkaPas encore d'évaluation
- Les 5 Langages D'amour Des AdolescentsDocument416 pagesLes 5 Langages D'amour Des AdolescentsMedelda Saint-vilPas encore d'évaluation
- Communication 0113Document3 pagesCommunication 0113Atif HananePas encore d'évaluation
- MEAPLN - AGAKHAN - Guide - Pratique - Animateur - Education CitoyennetéDocument95 pagesMEAPLN - AGAKHAN - Guide - Pratique - Animateur - Education Citoyennetévawew94353Pas encore d'évaluation
- Examen Final Niveau 2Document3 pagesExamen Final Niveau 2Rafael A. CastroPas encore d'évaluation
- CC 6 S1 1bac FRDocument2 pagesCC 6 S1 1bac FRbrinimed06gmail.comPas encore d'évaluation
- Stratégiespaysannesdansunevalléeandinedu PérouDocument211 pagesStratégiespaysannesdansunevalléeandinedu PérouJuan Carlos MPPas encore d'évaluation
- Chapitre4 CorDocument90 pagesChapitre4 CorDIAT ZOLA CHRIST DÉBORA KOMIENAPas encore d'évaluation
- Torsion Act (Banc D'essai)Document4 pagesTorsion Act (Banc D'essai)Nadia DridiPas encore d'évaluation
- Tâche Finale, Gestion Du TempsDocument10 pagesTâche Finale, Gestion Du TempsDaniel CRPas encore d'évaluation
- Retour Sur Investissement: Avec La GMAO CARL SourceDocument21 pagesRetour Sur Investissement: Avec La GMAO CARL SourcePaulin MAISSONPas encore d'évaluation
- 304 Anti Calcaire MagnetiqueDocument5 pages304 Anti Calcaire MagnetiquemakikouPas encore d'évaluation
- Syllabus-Gestion BaseDocument234 pagesSyllabus-Gestion BaseOscarPas encore d'évaluation
- CP I Chapitre I. Vitesse Et Lois de Vitesse 1 1Document17 pagesCP I Chapitre I. Vitesse Et Lois de Vitesse 1 1Section E GPPas encore d'évaluation
- 04-Audit 1 - Module 4 - Elements Communs A Tout AuditDocument97 pages04-Audit 1 - Module 4 - Elements Communs A Tout AuditJason MAGUSTINPas encore d'évaluation
- Cours Biodiversité Et Changements Globaux L3 Ecologie Et Environnement Mm. Senouci F.Document30 pagesCours Biodiversité Et Changements Globaux L3 Ecologie Et Environnement Mm. Senouci F.Roumaissa BouhadjabPas encore d'évaluation
- Filtre Planté de Roseaux, Traitement Des Eaux Usées, Station D'épurationDocument5 pagesFiltre Planté de Roseaux, Traitement Des Eaux Usées, Station D'épurationJe suis Je suisPas encore d'évaluation
- Langues Et Littérature Berbères Développement Et StandardisationDocument184 pagesLangues Et Littérature Berbères Développement Et Standardisationⴰⵖⵡⵡⴰⵖ ⵓⵣⵣⴰⵍPas encore d'évaluation
- 6579ec647ae77 231214 165352Document12 pages6579ec647ae77 231214 165352ImanePas encore d'évaluation
- 22 Réseaux Humains de CommunicationDocument24 pages22 Réseaux Humains de CommunicationDaniel DorivalPas encore d'évaluation
- Eia Neuropsy - Anat 3Document10 pagesEia Neuropsy - Anat 3hadiwalaa7Pas encore d'évaluation
- 2 Livret Senegal PDFDocument76 pages2 Livret Senegal PDFSOULEY salissouPas encore d'évaluation
- 1 - Fonction Distribuer - GéneralitésDocument1 page1 - Fonction Distribuer - GéneralitésCH -GAMESPas encore d'évaluation
- Travaux Pratiques enDocument37 pagesTravaux Pratiques enben boubakerPas encore d'évaluation
- Formulation Du Beton Dosage 350 Avec Adj MAX SUPERFLOW S250Document1 pageFormulation Du Beton Dosage 350 Avec Adj MAX SUPERFLOW S250Hadjer GcPas encore d'évaluation
- Projet RobotDocument8 pagesProjet RobotAbdoul Wahab LyPas encore d'évaluation
- 3210037796-Inspection report-SNIM Reclaimer D112 - Rev20220630 - FRDocument24 pages3210037796-Inspection report-SNIM Reclaimer D112 - Rev20220630 - FRMohamed LemrabottPas encore d'évaluation