Vous aimerez peut-être aussi
- M4 2008-2009bDocument8 pagesM4 2008-2009bkursley143Pas encore d'évaluation
- CC 0 A 96087 Ab 4 Be 1 DCDDocument13 pagesCC 0 A 96087 Ab 4 Be 1 DCDChaouki SaidiPas encore d'évaluation
- Corrig C3 A9DM1020Document5 pagesCorrig C3 A9DM1020petitsowlemajorPas encore d'évaluation
- PH5 (Oscillations Mécaniques Libres)Document13 pagesPH5 (Oscillations Mécaniques Libres)Seif Souid87% (30)
- PH7 Ondes ProgressivesDocument11 pagesPH7 Ondes ProgressivesHadhri HadhriPas encore d'évaluation
- PH7 (Ondes Progressives)Document11 pagesPH7 (Ondes Progressives)Seif Souid87% (46)
- Oscill MécaniquesDocument9 pagesOscill MécaniquesOuedraogo HarounaPas encore d'évaluation
- TD 7Document6 pagesTD 7kukis14Pas encore d'évaluation
- CM AcoustiqueDocument72 pagesCM AcoustiqueRoruPas encore d'évaluation
- Exam Janvier 10Document2 pagesExam Janvier 10adilbourejylahPas encore d'évaluation
- Equation de La ChaleurDocument6 pagesEquation de La ChaleurKader MilanoPas encore d'évaluation
- Mon TravailDocument4 pagesMon TravailChikov ÆminePas encore d'évaluation
- CM AcoustiqueDocument72 pagesCM AcoustiqueNabila HamlilPas encore d'évaluation
- Systemes Mecaniques Oscillants Cours LatexDocument22 pagesSystemes Mecaniques Oscillants Cours LatexHafsa HafsaPas encore d'évaluation
- Ondes Et Vibrations - Chap - 01 PDFDocument40 pagesOndes Et Vibrations - Chap - 01 PDFBoudjema SoudedPas encore d'évaluation
- Cours Chap11 ECE2Document12 pagesCours Chap11 ECE2Hmadna AymanePas encore d'évaluation
- Cours 1 Systèmes Mécaniques OscillantsDocument6 pagesCours 1 Systèmes Mécaniques OscillantsbidaouimounirPas encore d'évaluation
- Série - De.fourier Ezzahraoui 24 41Document18 pagesSérie - De.fourier Ezzahraoui 24 41YASSIN ZELMATPas encore d'évaluation
- Le Millenium Bridge - Mines-Ponts MP I 2016 - CorrigéDocument5 pagesLe Millenium Bridge - Mines-Ponts MP I 2016 - CorrigéAymen LaaroussiPas encore d'évaluation
- $2012 ESSEC E2 CorrigéDocument20 pages$2012 ESSEC E2 CorrigéClémentine BRUGUEROLLEPas encore d'évaluation
- Seance OscillateurDocument52 pagesSeance OscillateurHamza IchouPas encore d'évaluation
- Solutions 096111Document72 pagesSolutions 096111Nabil MessaoudiPas encore d'évaluation
- I / Propagation D'un Ébranlement: Serie de Physique #7Document11 pagesI / Propagation D'un Ébranlement: Serie de Physique #7Jean Matthieu MohulembiPas encore d'évaluation
- Exam Meca An Janvier 2012 PDFDocument4 pagesExam Meca An Janvier 2012 PDFmadani abdelhamidPas encore d'évaluation
- OndesDocument32 pagesOndesOmar ErrajiPas encore d'évaluation
- Chapitre V - Bon - IMV - 230511 - 161811Document7 pagesChapitre V - Bon - IMV - 230511 - 161811Koutouo FrédyPas encore d'évaluation
- L05 PHR004 2010 PDFDocument22 pagesL05 PHR004 2010 PDFMarwane OuadadPas encore d'évaluation
- S6 Chapitre 6 Oscillations MecaniquesDocument12 pagesS6 Chapitre 6 Oscillations MecaniquesDabo100% (1)
- Vibrations 1ddl CourtDocument16 pagesVibrations 1ddl CourtIbrahim BenaliPas encore d'évaluation
- TD - Problèmes Aux Valeurs PropresDocument2 pagesTD - Problèmes Aux Valeurs Propresghouilaamine3.3Pas encore d'évaluation
- 15 Les Mouvements Plans 1Document8 pages15 Les Mouvements Plans 1Kawtar kawtarPas encore d'évaluation
- Variables Aléatoires Et Lois de ProbabilitéDocument8 pagesVariables Aléatoires Et Lois de Probabilitésjaubert100% (3)
- TD 01Document2 pagesTD 01Narcisse zanmenouPas encore d'évaluation
- Ermec 03 OhaDocument4 pagesErmec 03 OhaBrisni MbobiPas encore d'évaluation
- Résumé Cours Vibrations PDFDocument9 pagesRésumé Cours Vibrations PDFRe VivalPas encore d'évaluation
- LM345 TD5solDocument6 pagesLM345 TD5solkukis14Pas encore d'évaluation
- Corrige DL 704Document4 pagesCorrige DL 704Hicham ZghariPas encore d'évaluation
- CM Phys SolideDocument45 pagesCM Phys SolideBenali RerbalPas encore d'évaluation
- Oscillations Forcées en Mécanique - RSF - ELEVEDocument10 pagesOscillations Forcées en Mécanique - RSF - ELEVEAlexi SchramPas encore d'évaluation
- CoursMecaDeug PDFDocument100 pagesCoursMecaDeug PDFazzamPas encore d'évaluation
- DDS Cours 12Document44 pagesDDS Cours 12Tamba WafaaPas encore d'évaluation
- TP 1Document8 pagesTP 1Ahmed Yassine HdhiriPas encore d'évaluation
- Chapitre 3 Solutions Stationnaires de L'équation de SchorodingerDocument21 pagesChapitre 3 Solutions Stationnaires de L'équation de SchorodingerETUSUPPas encore d'évaluation
- Examen Final - Corrigé - Phys04 - 2020-21 - ESSAT PDFDocument5 pagesExamen Final - Corrigé - Phys04 - 2020-21 - ESSAT PDFHou HouPas encore d'évaluation
- Meca Exam 2014Document5 pagesMeca Exam 2014Nam KolyaPas encore d'évaluation
- FOURIEReDocument36 pagesFOURIEResalenko1erPas encore d'évaluation
- 7 Lois Newton Mouvement Champs UniformeDocument36 pages7 Lois Newton Mouvement Champs Uniformecebeillacroche4Pas encore d'évaluation
- 09 Lois - SuiteDocument36 pages09 Lois - Suitejoe celainPas encore d'évaluation
- Mines Ponts MP 2003 Maths 2 CorrigeDocument4 pagesMines Ponts MP 2003 Maths 2 Corrigeamirisarra18Pas encore d'évaluation
- CH EquadiffDocument18 pagesCH EquadiffmamanPas encore d'évaluation
- L1-Meca-TD-Oscillation - correctionExAutresConditionsDocument4 pagesL1-Meca-TD-Oscillation - correctionExAutresConditionsNguyễn Minh ĐứcPas encore d'évaluation
- Cor - TD Edo 2020 5 Exos3 4Document2 pagesCor - TD Edo 2020 5 Exos3 4Ahmed AbbassiPas encore d'évaluation
- Chapitre6 CinemaDocument14 pagesChapitre6 CinemaIsaacar Moye la SouzaPas encore d'évaluation
- Theoremeslimites 2Document11 pagesTheoremeslimites 2Safaa KahilPas encore d'évaluation
- Ch2 - Oscillateurs MécaniquesDocument12 pagesCh2 - Oscillateurs Mécaniquesloubna moufidPas encore d'évaluation
- Agreg 2010 - LaplacienDocument6 pagesAgreg 2010 - Laplacienbilly debasePas encore d'évaluation
- EqDocument19 pagesEqmbou chancellePas encore d'évaluation
- CoursDocument8 pagesCoursfrédéric MasialaPas encore d'évaluation
- Résultats TD 4Document2 pagesRésultats TD 4Sébastien UrienPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- 5GC Versus Epc EfortDocument13 pages5GC Versus Epc EfortfatimaPas encore d'évaluation
- Evolutions MTC Efort PDFDocument5 pagesEvolutions MTC Efort PDFfatimaPas encore d'évaluation
- 5G EfortDocument9 pages5G EfortfatimaPas encore d'évaluation
- Orca Share Media1502120503248Document18 pagesOrca Share Media1502120503248fatimaPas encore d'évaluation
- TP2 Electronique de PussanceDocument5 pagesTP2 Electronique de Pussancemohamed kaddaPas encore d'évaluation
- Mma 2010 Examen Vu FDocument27 pagesMma 2010 Examen Vu Ffarhat ghanem50% (2)
- MBAYA MATELU STEVE Memoire Bac 3 GEDocument56 pagesMBAYA MATELU STEVE Memoire Bac 3 GEStevee TigerPas encore d'évaluation
- Cahier D'exercices de Mon Projet Vert SIRINE JAMOUSSI Agriwatt Energy - Séance 1Document48 pagesCahier D'exercices de Mon Projet Vert SIRINE JAMOUSSI Agriwatt Energy - Séance 1SirineJamoussiPas encore d'évaluation
- ExploitationDocument43 pagesExploitationFelix AssemanPas encore d'évaluation
- Le Reglement ThermiqueDocument50 pagesLe Reglement ThermiqueAbdelaly JabbadPas encore d'évaluation
- Physique Generale I: Livres J. Kane, M. Sternheim, "Physique"Document39 pagesPhysique Generale I: Livres J. Kane, M. Sternheim, "Physique"Ramzi El Idrissi0% (1)
- 2 Partie 1 CSC Architecture 1Document449 pages2 Partie 1 CSC Architecture 1alsonkhuabi47Pas encore d'évaluation
- Journal LIBERTE Du 24.07.2014 PDFDocument18 pagesJournal LIBERTE Du 24.07.2014 PDFChakib BenzergaPas encore d'évaluation
- Uranium Atlas 2022Document56 pagesUranium Atlas 2022Mouhieddine AzmaniPas encore d'évaluation
- Sujet39 PDFDocument3 pagesSujet39 PDFFerssiwi OmarPas encore d'évaluation
- Tapis de Course T900A Domyos DecathlonDocument1 pageTapis de Course T900A Domyos DecathlonStéphane Van BovenPas encore d'évaluation
- Plaquette Fluides Et ClimatisationDocument1 pagePlaquette Fluides Et ClimatisationrPas encore d'évaluation
- Dimensionnement en Basse TensionDocument10 pagesDimensionnement en Basse TensionDjouweinannodji Yves100% (1)
- Bullet StabilisationDocument3 pagesBullet Stabilisationrgpaaa0% (1)
- Le Développement DurableDocument42 pagesLe Développement DurableMehdi NakouriPas encore d'évaluation
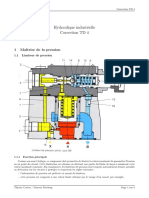
- Correction TD3 ENPDocument17 pagesCorrection TD3 ENPgolden aaaPas encore d'évaluation
- Sidel Meca Sbo 6-10 enDocument137 pagesSidel Meca Sbo 6-10 enTiago Godinho100% (2)
- Guide REMME Maintenance WebDocument28 pagesGuide REMME Maintenance WebAmine SabbarPas encore d'évaluation
- Techniques D'exploitation Et Restauration Des Sites Miniers: December 2021Document87 pagesTechniques D'exploitation Et Restauration Des Sites Miniers: December 2021dbxfcg vPas encore d'évaluation
- Formation Sur PRP 2017Document37 pagesFormation Sur PRP 2017Mohamed ZaaratPas encore d'évaluation
- Chapitre 4. NUCDocument45 pagesChapitre 4. NUCReda TaouilPas encore d'évaluation
- CorrectionDocument4 pagesCorrectionNan NoussPas encore d'évaluation
- T06034 - Pompe MISSION 3x4 RDocument1 pageT06034 - Pompe MISSION 3x4 RMaximiliano BettarelPas encore d'évaluation
- 9 9 TD 4 CorrectionDocument8 pages9 9 TD 4 Correctionهيثم قاسميPas encore d'évaluation
- PLG - Polynesian PACT2 - Te Moana o HivaDocument5 pagesPLG - Polynesian PACT2 - Te Moana o HivaFred AliPas encore d'évaluation
- French 1am17 3trim5Document2 pagesFrench 1am17 3trim5Ouffa OuafaPas encore d'évaluation
- Leroy Somer 52.3Document28 pagesLeroy Somer 52.3Oğuz Kağan ÖkdemPas encore d'évaluation
- Bâtiments Intelligents Et Efficacité Énergétique Plates-Formes Technologiques Et Programmes de Recherches & Développement Du CEADocument24 pagesBâtiments Intelligents Et Efficacité Énergétique Plates-Formes Technologiques Et Programmes de Recherches & Développement Du CEABenjamin Vivien KetohouPas encore d'évaluation
- MR348CLIOV61Document96 pagesMR348CLIOV61alinandrone100% (1)