Vous aimerez peut-être aussi
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- Asservissement MCCDocument37 pagesAsservissement MCCabdessamadPas encore d'évaluation
- Projet Automatique DEADocument27 pagesProjet Automatique DEAMariamPas encore d'évaluation
- Les Réseaux de Capteurs Sans FilDocument23 pagesLes Réseaux de Capteurs Sans FilkingGauss officiel100% (1)
- Compte Rendu de RobotiqueDocument5 pagesCompte Rendu de RobotiqueVincent Sarrat100% (1)
- Commande Neuro Floue PDFDocument2 pagesCommande Neuro Floue PDFTodd100% (1)
- PROJETDocument17 pagesPROJETHAMZA ELATIQYPas encore d'évaluation
- Application Commande FloueDocument26 pagesApplication Commande Flouekari_agaxPas encore d'évaluation
- Magnetisme 2Document17 pagesMagnetisme 2hamma_meskiniPas encore d'évaluation
- Cours AsservissementDocument2 pagesCours AsservissementAsm MaPas encore d'évaluation
- TP 1 RégulationDocument7 pagesTP 1 RégulationNa Dir SayahPas encore d'évaluation
- 4 PalettiseurDocument4 pages4 PalettiseurmimoutesPas encore d'évaluation
- Slides1 SNL 2019Document41 pagesSlides1 SNL 2019hit master100% (1)
- TD N7Document10 pagesTD N7JesúsGambartePas encore d'évaluation
- Asservissement de Niveau - À Vanne Motorisée - Bouzekri ADocument31 pagesAsservissement de Niveau - À Vanne Motorisée - Bouzekri AJaouad Diouri50% (2)
- Présentation - Commande Optimale 2FIGE 2019-2020 - Version 2Document25 pagesPrésentation - Commande Optimale 2FIGE 2019-2020 - Version 2El GhafraouiPas encore d'évaluation
- Examen Rattrapage GE4 452 BG 2020Document1 pageExamen Rattrapage GE4 452 BG 2020Mohamed Amine ZouhriPas encore d'évaluation
- Chapitre s3 - 3 Composants ActifsDocument12 pagesChapitre s3 - 3 Composants ActifsdolkPas encore d'évaluation
- ANFISDocument3 pagesANFISAchraf Boura100% (1)
- 6464 TP Distributeur Doc EleveDocument11 pages6464 TP Distributeur Doc EleveChokri AtefPas encore d'évaluation
- Electronique de PuissanceDocument4 pagesElectronique de PuissanceNOURDINE EZZALMADIPas encore d'évaluation
- Corr Robot - Asservissement Application n2Document10 pagesCorr Robot - Asservissement Application n2Aleex DanielPas encore d'évaluation
- Systèmes Temps-Réel EmbarquésDocument31 pagesSystèmes Temps-Réel EmbarquésabbsalemPas encore d'évaluation
- Cours Linearisation Autour D Un Point de FonctionnementDocument14 pagesCours Linearisation Autour D Un Point de FonctionnementFateh BennecerPas encore d'évaluation
- Commande Optimale PDFDocument47 pagesCommande Optimale PDFصليحة احمد0% (1)
- Exercice Signaux SystemDocument3 pagesExercice Signaux Systemtianqi shaoPas encore d'évaluation
- Chap8-Les RegistresDocument6 pagesChap8-Les RegistresAhmed GourinePas encore d'évaluation
- Application Commande FloueDocument26 pagesApplication Commande FloueNaouel Naouel GuezmirPas encore d'évaluation
- Cours Info - IndustrielDocument33 pagesCours Info - IndustrielAbdallah BelabbesPas encore d'évaluation
- Regulation de Vitesse MCCDocument10 pagesRegulation de Vitesse MCCMohamed Bou100% (1)
- CCF MicrocontroleurDocument4 pagesCCF MicrocontroleurLAPPPas encore d'évaluation
- (CStat) (CO) Convertisseurs StatiquesDocument12 pages(CStat) (CO) Convertisseurs StatiquesAsm MaPas encore d'évaluation
- Les Systèmes Automatisés - TD 1 (Correction)Document14 pagesLes Systèmes Automatisés - TD 1 (Correction)sinchicovichPas encore d'évaluation
- Commande ElectriqueDocument37 pagesCommande ElectriqueAbdelbaki ElfahemPas encore d'évaluation
- Commande D'un MCC Par Un RLF: I.Introduction GeneraleDocument17 pagesCommande D'un MCC Par Un RLF: I.Introduction GeneraleDjameleddine BougrinePas encore d'évaluation
- Sujets TP 1a PDFDocument22 pagesSujets TP 1a PDFAdil AbouelhassanPas encore d'évaluation
- 7 2004.sa - TD10Document2 pages7 2004.sa - TD10Yassino WickPas encore d'évaluation
- TP N°01 PDFDocument11 pagesTP N°01 PDFBrahim GasbaouiPas encore d'évaluation
- Commande PWM Moteurs PDFDocument5 pagesCommande PWM Moteurs PDFerno785Pas encore d'évaluation
- TP Logique Fhloue ENNASSIRI HamzaDocument8 pagesTP Logique Fhloue ENNASSIRI HamzaHamza ENNASSIRIPas encore d'évaluation
- Cours Python MysqlDocument39 pagesCours Python Mysqlsamsoum1Pas encore d'évaluation
- 6 PWMDocument5 pages6 PWMbtssnaPas encore d'évaluation
- Cours Commande Des Systèmes Linéaires Version FinaleDocument79 pagesCours Commande Des Systèmes Linéaires Version FinalezaynPas encore d'évaluation
- Automatique Avancée Commande Non-Linéaire P1: Pré-Requis Et ObjectifsDocument24 pagesAutomatique Avancée Commande Non-Linéaire P1: Pré-Requis Et ObjectifsMbaira LeilaPas encore d'évaluation
- Examen Principal Juin 2012Document2 pagesExamen Principal Juin 2012Hadi Ben Saïd100% (1)
- 5.3 Correction Des Systèmes AsservisDocument21 pages5.3 Correction Des Systèmes AsservisKeubeng CriyosPas encore d'évaluation
- Representation Et Analyse Des Systemes MultiVariablesDocument66 pagesRepresentation Et Analyse Des Systemes MultiVariablesAmidou BetiePas encore d'évaluation
- Cours Automatique Linéaire Séance 1Document17 pagesCours Automatique Linéaire Séance 1fakehiPas encore d'évaluation
- LabviewDocument19 pagesLabviewtortorouPas encore d'évaluation
- 2 - Fiche de Séquence1Document5 pages2 - Fiche de Séquence1hamza darrarPas encore d'évaluation
- Applications de La Logique FloueDocument3 pagesApplications de La Logique FloueAlain JobsPas encore d'évaluation
- Cours MCCDocument4 pagesCours MCCMed GuerPas encore d'évaluation
- CH3 Convertisseur AnalogiqueDocument12 pagesCH3 Convertisseur AnalogiqueMohammed AbdiPas encore d'évaluation
- Systemes Echantillonnés D'ordre 2Document2 pagesSystemes Echantillonnés D'ordre 2khayyamPas encore d'évaluation
- Cours KalmanDocument70 pagesCours KalmanHachemi BhePas encore d'évaluation
- Cours Temps Reel In2-Nup-Nup PDFDocument104 pagesCours Temps Reel In2-Nup-Nup PDFspeedov73Pas encore d'évaluation
- Cours Grafcet Print2Document13 pagesCours Grafcet Print2yazidfarsiPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Cours Capt Acq 2Document40 pagesCours Capt Acq 2Mourtalla FAYEPas encore d'évaluation
- Cours Capt Acq 2Document40 pagesCours Capt Acq 2Mourtalla FAYEPas encore d'évaluation
- TD3 M1-CapteursDocument5 pagesTD3 M1-CapteursMourtalla FAYEPas encore d'évaluation
- Cours Capt Acq 1Document31 pagesCours Capt Acq 1Mourtalla FAYEPas encore d'évaluation
- TD1 CapteursDocument3 pagesTD1 CapteursMourtalla FAYE100% (1)
- L1-GPL - Cours Métrologie 1Document53 pagesL1-GPL - Cours Métrologie 1Hafida EnnajiPas encore d'évaluation
- Mesure PDFDocument116 pagesMesure PDFenzo100% (1)
- Chapitre1 PDFDocument49 pagesChapitre1 PDFghazi khazriPas encore d'évaluation
- Optimisation Des Coûts Dans La Centrale Thermique (JLEC)Document125 pagesOptimisation Des Coûts Dans La Centrale Thermique (JLEC)Hamza Fadla100% (1)
- Angelantoni EKO Basic 700,1500 - Manual PDFDocument45 pagesAngelantoni EKO Basic 700,1500 - Manual PDFJose MorenoPas encore d'évaluation
- Ex c1 Pelle HydrauliqueDocument3 pagesEx c1 Pelle Hydrauliqueyounes100% (1)
- Mii 00026Document62 pagesMii 00026Houssine GuePas encore d'évaluation
- Agi LiftDocument2 pagesAgi LiftJan HendriksPas encore d'évaluation
- Cours Hydrogéologie LFST2Document210 pagesCours Hydrogéologie LFST2Emna Gheriani100% (2)
- Electricié Rattrapage 2019-2020Document2 pagesElectricié Rattrapage 2019-2020Rachid MrabtiPas encore d'évaluation
- Exercices Atomistiques PDFDocument2 pagesExercices Atomistiques PDFCharlesPas encore d'évaluation
- 00023595Document40 pages00023595Claudio TesserPas encore d'évaluation
- Série Dérivabilité 3 MathsDocument2 pagesSérie Dérivabilité 3 Mathsrayenelheni51Pas encore d'évaluation
- Alloys DataDocument3 pagesAlloys DatamdkhandavePas encore d'évaluation
- Instrumentation Partie1Document354 pagesInstrumentation Partie1Ayaovi Jorlau100% (1)
- Equations (Anc Prog - 3ème-)Document4 pagesEquations (Anc Prog - 3ème-)MATHS - VIDEOSPas encore d'évaluation
- La Commande À Modèle Interne (IMC)Document31 pagesLa Commande À Modèle Interne (IMC)Abdelhamid Oughanem100% (2)
- Annatut': BiophysiqueDocument21 pagesAnnatut': BiophysiqueKhaoulaFaithful100% (2)
- DEVOIR 11 OctobreDocument6 pagesDEVOIR 11 OctobreHeni HtiraPas encore d'évaluation
- Transformation MouvDocument6 pagesTransformation Mouvachraf benfateh أشرف بن فاتحPas encore d'évaluation
- Cours - IRDocument41 pagesCours - IRيوسف حجوPas encore d'évaluation
- A02 Actions Mecaniques Et Forces PDFDocument3 pagesA02 Actions Mecaniques Et Forces PDFKarimm Karim100% (1)
- Atelier Raisonnement Tableau BXDocument4 pagesAtelier Raisonnement Tableau BXkajjoui mohamedPas encore d'évaluation
- Chapitre 6 Calcul TensorielDocument4 pagesChapitre 6 Calcul TensorielAymen Ben AmraPas encore d'évaluation
- These Nguyen LMT Version FinaleDocument217 pagesThese Nguyen LMT Version FinaleTerence DengPas encore d'évaluation
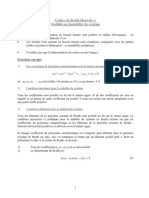
- Critere DE ROUTHDocument5 pagesCritere DE ROUTHFadwaPas encore d'évaluation
- Cor StructuresDocument14 pagesCor Structuresfrederic sateraPas encore d'évaluation
- Maxwell Et PropagationDocument18 pagesMaxwell Et PropagationIslamnet Islam IslamnetPas encore d'évaluation
- Exercices Sur Les Espaces Vectoriels NormésDocument3 pagesExercices Sur Les Espaces Vectoriels NormésEssaidi Ali100% (1)
- Cours AcquisitionDocument60 pagesCours AcquisitionKhaled OuniPas encore d'évaluation
- Exercices 2 Decroissance RadioactiveDocument1 pageExercices 2 Decroissance RadioactivesmfouazePas encore d'évaluation
- BAC 2018 Sciences de Lingénieur STM PDFDocument17 pagesBAC 2018 Sciences de Lingénieur STM PDFAbdelali YacoubiPas encore d'évaluation