Vous aimerez peut-être aussi
- Corige ExamenDocument2 pagesCorige Examenlmofid100% (3)
- Pont de Wien.: Exercice N°1: Etude de L'oscillateur Sinusoïdal ÀDocument1 pagePont de Wien.: Exercice N°1: Etude de L'oscillateur Sinusoïdal ÀMãrÿ Ōûmå100% (1)
- TD11 FiltrageDocument3 pagesTD11 Filtrageدروسي50% (2)
- Les Capteurs, 62 Exercices Et Problèmes Corrigés (1) - 60-63Document4 pagesLes Capteurs, 62 Exercices Et Problèmes Corrigés (1) - 60-63Maria MEKLIPas encore d'évaluation
- Triac Et DiacDocument4 pagesTriac Et DiacAbdo Rabbu75% (4)
- TD 3 Capteur Et Instrumentation 2021 CorrigéDocument4 pagesTD 3 Capteur Et Instrumentation 2021 CorrigéRabah Hadjar100% (5)
- Corrige DM1 PDFDocument7 pagesCorrige DM1 PDFBrandy OdonnellPas encore d'évaluation
- Correction Oscillateur ColpittsDocument5 pagesCorrection Oscillateur Colpittsayman lamzouri100% (1)
- l2 en TDDocument36 pagesl2 en TDSissi Dadi100% (2)
- Thyristor&triacDocument4 pagesThyristor&triacMahfoud Zouaouine100% (3)
- TD1 CorrigéDocument6 pagesTD1 Corrigéayoub khalfaouiPas encore d'évaluation
- NE555 en Bascules Monostable Et AstableDocument6 pagesNE555 en Bascules Monostable Et AstablevyasnaikoPas encore d'évaluation
- 1 - Les Oscillateurs SinusoïdauxDocument14 pages1 - Les Oscillateurs SinusoïdauxANAS ETTANANIA100% (1)
- TD 2 MultivibrateurDocument2 pagesTD 2 MultivibrateurSamir Nait0% (1)
- La Contre RéactionDocument14 pagesLa Contre RéactionOns BouzidiPas encore d'évaluation
- TD ElectroniqueDocument4 pagesTD ElectroniqueOussama El B'charriPas encore d'évaluation
- TD 2 Capteur Et Instrumentation 2021 CorrigéDocument3 pagesTD 2 Capteur Et Instrumentation 2021 CorrigéRabah Hadjar100% (1)
- Contre ReactionDocument18 pagesContre ReactionMohammad HassounPas encore d'évaluation
- Correction Série3Document10 pagesCorrection Série3Mohamed FizaziPas encore d'évaluation
- Convertisseurs CorrigeDocument4 pagesConvertisseurs Corrigeahmed100% (1)
- 1 Examen 2006 ElectroniqueDocument2 pages1 Examen 2006 ElectroniqueCharaf Leo100% (1)
- TD RedresseurDocument2 pagesTD RedresseurMohamed Oulad100% (1)
- Exercice 1Document2 pagesExercice 1darknight100% (1)
- Corrige Chap5 Exo1Document1 pageCorrige Chap5 Exo1Medab Abd El MalekPas encore d'évaluation
- TD Hacheurs 2bts EsaDocument8 pagesTD Hacheurs 2bts EsaKamal PcPas encore d'évaluation
- TD Numeration LogiqueDocument4 pagesTD Numeration LogiqueAdhem NaijiPas encore d'évaluation
- M.tchaptchet EnpuDocument17 pagesM.tchaptchet EnpuJules100% (1)
- Série de RévisionDocument4 pagesSérie de RévisionDhafer Mezghani100% (1)
- TP 02 Amplificateur À TransistorDocument2 pagesTP 02 Amplificateur À TransistorOussama BoualiPas encore d'évaluation
- Etude Du Circuit NE 555Document10 pagesEtude Du Circuit NE 555codety CODETYPas encore d'évaluation
- Exercice 1Document4 pagesExercice 1Débonnaire Bandeya100% (1)
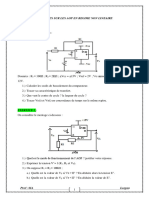
- Exerxices Sur Les Aop en Regime Non Lineaire Elo2Document4 pagesExerxices Sur Les Aop en Regime Non Lineaire Elo2seniorblaisotPas encore d'évaluation
- Chapitre 3: Conversions Numériques: 1/ Présentation Et Applications Des ConversionsDocument16 pagesChapitre 3: Conversions Numériques: 1/ Présentation Et Applications Des ConversionsEmna KanzariPas encore d'évaluation
- A.1.1 Polycopié Exercices Corrigés Traitement Numérique Du SignalDocument41 pagesA.1.1 Polycopié Exercices Corrigés Traitement Numérique Du SignalFatima zahra YaacobiPas encore d'évaluation
- TD Automatique 1A 2016 JMDDocument20 pagesTD Automatique 1A 2016 JMDFaïssolath Achirou100% (1)
- C22 AOP5ComplementDocument6 pagesC22 AOP5ComplementespritrokPas encore d'évaluation
- Chapitre 1 QuadripolesDocument16 pagesChapitre 1 QuadripolesibouPas encore d'évaluation
- Cours OptocoupleurDocument3 pagesCours OptocoupleurIhab BenayachePas encore d'évaluation
- Can Cna td1Document2 pagesCan Cna td1Hyacinthe KossiPas encore d'évaluation
- Thyristorp3 PDFDocument7 pagesThyristorp3 PDFMer Oua100% (1)
- Exexrcie AOP Régime LinéaireDocument7 pagesExexrcie AOP Régime LinéaireTc Ng100% (2)
- TD-Logique SéquentielleDocument8 pagesTD-Logique SéquentielleFabrice leonel Toukam PoualeuPas encore d'évaluation
- Exo MultivibrateurDocument1 pageExo MultivibrateurFiras Ksontini100% (2)
- Exercices Avec Solutions: Dispositifs Passifs Et Actifs RF Et Micro-OndesDocument110 pagesExercices Avec Solutions: Dispositifs Passifs Et Actifs RF Et Micro-OndesAyman Ouhaji100% (2)
- TD 2Document2 pagesTD 2BakkariPas encore d'évaluation
- TD8Document2 pagesTD8bouzid mhamdi100% (4)
- TD1 CapteursDocument3 pagesTD1 CapteursMourtalla FAYE100% (1)
- 14 ExercicesDocument16 pages14 ExercicesMeryouma Larb100% (2)
- EXERCICE GradateurDocument1 pageEXERCICE Gradateurdfgh100% (1)
- Travaux Diriges Ei l2 s1 2015Document29 pagesTravaux Diriges Ei l2 s1 2015YesmaRofia100% (2)
- TP ComparateurDocument3 pagesTP ComparateurLeo Renucci100% (1)
- TD 3-Electricite PDFDocument2 pagesTD 3-Electricite PDFAyoub BrhmmouchPas encore d'évaluation
- S Rie 2Document4 pagesS Rie 2OUSSAMA BOUZEGAOUPas encore d'évaluation
- TD Automatique INSADocument7 pagesTD Automatique INSASalah Eddine EL AbbadiPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- tp12 GBFDocument1 pagetp12 GBFÃmîne ÄboulaazmPas encore d'évaluation
- Redressement CommandéDocument25 pagesRedressement Commandénadir100% (1)
- Fascicule Fonctions ElectroniquesDocument34 pagesFascicule Fonctions ElectroniquesMahmoud ChiboubPas encore d'évaluation
- CHAP 1 TRANSMISSSION PAR ENGRENAGES 2020 - 2021 (B)Document3 pagesCHAP 1 TRANSMISSSION PAR ENGRENAGES 2020 - 2021 (B)aissatou dia gayePas encore d'évaluation
- Applications Sur Les Matrices PrédéfiniesDocument1 pageApplications Sur Les Matrices Prédéfiniesaissatou dia gayePas encore d'évaluation
- 06 Oscillateurs Td-EnonceDocument5 pages06 Oscillateurs Td-Enonceaissatou dia gayePas encore d'évaluation
- 05 - ALI EnoncéDocument6 pages05 - ALI Enoncéaissatou dia gayePas encore d'évaluation
- 05 - ALI Corrige1Document14 pages05 - ALI Corrige1aissatou dia gayePas encore d'évaluation
- 05 - ALI Corrige1Document14 pages05 - ALI Corrige1aissatou dia gayePas encore d'évaluation
- Exercices Automatique 2016Document19 pagesExercices Automatique 2016AbdElKrim100% (3)
- TP Traitement Des SignauxDocument24 pagesTP Traitement Des SignauxMaster kabondoPas encore d'évaluation
- Cours Camrani Régulation 2020 2 Partie 2 2023Document110 pagesCours Camrani Régulation 2020 2 Partie 2 2023Güzlãn Güzlã100% (1)
- Chapitre 1 - Notions de Convolution Et CorrélationDocument19 pagesChapitre 1 - Notions de Convolution Et CorrélationOumaima ElassaliPas encore d'évaluation
- TP Image PDFDocument4 pagesTP Image PDFyves1ndriPas encore d'évaluation
- Chp1 TRX Donnees 2021 2022 MoodleDocument12 pagesChp1 TRX Donnees 2021 2022 Moodleslim yaichPas encore d'évaluation
- Bande Passante - WikipédiaDocument13 pagesBande Passante - WikipédiaLOUEMBET BourgetPas encore d'évaluation
- Cours TS - 2Document184 pagesCours TS - 2Hamza AzzitiPas encore d'évaluation
- Examen 19-20Document1 pageExamen 19-20Chakib DjellaliPas encore d'évaluation
- Signaux Et Communications Hwei HSU S A IDocument19 pagesSignaux Et Communications Hwei HSU S A ISanae Berraho50% (2)
- Sujet Dexamen s1 Codage - v6 2015Document1 pageSujet Dexamen s1 Codage - v6 2015Hard RoadPas encore d'évaluation
- Cosinus SureleveDocument12 pagesCosinus SureleveJalila MahmoudPas encore d'évaluation
- Cours Filtrage AnalogiqueDocument15 pagesCours Filtrage AnalogiqueBshAekPas encore d'évaluation
- Chap II FIltres MicoondesDocument23 pagesChap II FIltres MicoondesMhamed BouhaikPas encore d'évaluation
- Anna Les FourierDocument24 pagesAnna Les FourierAssma HerzogovinaPas encore d'évaluation
- Systémes Asservis LP 22Document184 pagesSystémes Asservis LP 22Med Amine LabrayakPas encore d'évaluation
- Traitement D'imageDocument23 pagesTraitement D'imageRoumaissa RouagPas encore d'évaluation
- Theorie Des Filtres AnalogiquesDocument46 pagesTheorie Des Filtres AnalogiquesMahmoud Doughan100% (1)
- Traitement de SignalDocument2 pagesTraitement de SignalAlida DONGMOPas encore d'évaluation
- TD Traitement Image GimpDocument12 pagesTD Traitement Image Gimphamid_touhamiPas encore d'évaluation
- EMCP2 Temperature SensorDocument3 pagesEMCP2 Temperature SensorDuboisPas encore d'évaluation
- Nha6153700 07Document18 pagesNha6153700 07alexanderPas encore d'évaluation
- Compte Rendu TP3Document31 pagesCompte Rendu TP3Jourdan MbappePas encore d'évaluation
- Un Filtre Passif: Passe Bas Passif Passe Haut PassifDocument4 pagesUn Filtre Passif: Passe Bas Passif Passe Haut Passifnouhayla nouhaylaPas encore d'évaluation
- Concours2014 TsDocument15 pagesConcours2014 TsLourdiane amelPas encore d'évaluation
- Compte Rendu Asservissement 1 (Enregistré Automatiquement)Document19 pagesCompte Rendu Asservissement 1 (Enregistré Automatiquement)Nasri RimehPas encore d'évaluation
- FCR XG 5000Document4 pagesFCR XG 5000غسان المكيPas encore d'évaluation
- Les FiltresDocument13 pagesLes Filtresreda100% (1)
- R OptimalDocument25 pagesR Optimalجمال سينغPas encore d'évaluation