Vous aimerez peut-être aussi
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesD'EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesÉvaluation : 2 sur 5 étoiles2/5 (1)
- CI5 07 Correcteurs2019Document8 pagesCI5 07 Correcteurs2019Ayoub JafriPas encore d'évaluation
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Examen API&SupervisionDocument4 pagesExamen API&SupervisionSoufien Atoui67% (3)
- DT Exa Cao 2017 2018Document2 pagesDT Exa Cao 2017 2018Wafa BouzidPas encore d'évaluation
- Corrigé Eff Tsgo 2008Document11 pagesCorrigé Eff Tsgo 2008Hamza Chf0% (1)
- Robot Grinding ArticleDocument11 pagesRobot Grinding ArticleAndrej ApelPas encore d'évaluation
- Formação R-ArnDocument60 pagesFormação R-ArnJehan AICPas encore d'évaluation
- PT SIC 2022 RobotEntretienVignoble SujetDocument53 pagesPT SIC 2022 RobotEntretienVignoble SujetGuillaume VicarioPas encore d'évaluation
- Prof APEFDocument12 pagesProf APEFMeryemHmouriPas encore d'évaluation
- Essai de Traction: Thème Du TPDocument6 pagesEssai de Traction: Thème Du TPraouf bensaciPas encore d'évaluation
- Analyse Fonctionnelle (Cours)Document13 pagesAnalyse Fonctionnelle (Cours)ESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Devoir 2 Modele 2 Si 2 Bac SM B Semestre 2Document17 pagesDevoir 2 Modele 2 Si 2 Bac SM B Semestre 2lemsouguerPas encore d'évaluation
- 2FI 16-17 RatDocument3 pages2FI 16-17 RatEl GhafraouiPas encore d'évaluation
- Introduction GénéraleDocument16 pagesIntroduction GénéralestevedjochuengPas encore d'évaluation
- Mines Ponts MP 2020 Manipulateur FESTO Sujet CopieDocument26 pagesMines Ponts MP 2020 Manipulateur FESTO Sujet CopieMartin MaurerPas encore d'évaluation
- MP Sujet V6 - 11Document17 pagesMP Sujet V6 - 11Ahmed Med AbdellahiPas encore d'évaluation
- 1Document28 pages1Wael HalilaPas encore d'évaluation
- Module 09 Elaboration Des Plans D'aménagement Des PérimètresDocument26 pagesModule 09 Elaboration Des Plans D'aménagement Des PérimètresAlou DIARRAPas encore d'évaluation
- Elaboration ApefDocument6 pagesElaboration Apefkldmnt100% (1)
- Document 2Document6 pagesDocument 2coralie ABOPas encore d'évaluation
- Procédure de Programmation - OdtDocument8 pagesProcédure de Programmation - OdtAyoub TarhouchiPas encore d'évaluation
- 2018.11239 Bts Eec 2018 U41 SujetDocument14 pages2018.11239 Bts Eec 2018 U41 SujetLagaffPas encore d'évaluation
- Jenny FinalDocument17 pagesJenny FinalNaomie JenniferPas encore d'évaluation
- MATERIELS DE CHANTIERS Chap 2 PDFDocument7 pagesMATERIELS DE CHANTIERS Chap 2 PDFAdel NeymoPas encore d'évaluation
- SiB 2018 (Sujet)Document45 pagesSiB 2018 (Sujet)Youssef TrimechPas encore d'évaluation
- PSI Sujet V5 - 31Document17 pagesPSI Sujet V5 - 31Ahmed Med AbdellahiPas encore d'évaluation
- TD 3 Maintenance 2021 Kaddiri FiabiliteDocument9 pagesTD 3 Maintenance 2021 Kaddiri FiabiliteybenguennyPas encore d'évaluation
- E3c Spe Sciences Ingenieur Premiere 03880 Sujet OfficielDocument10 pagesE3c Spe Sciences Ingenieur Premiere 03880 Sujet Officiellucaspouplard100Pas encore d'évaluation
- Epreuve de Sciences Industrielles BDocument46 pagesEpreuve de Sciences Industrielles BHajar Ben GaraâPas encore d'évaluation
- Technologie D'usinageDocument20 pagesTechnologie D'usinageNassro ZiadPas encore d'évaluation
- 9091 Sujet E2 Polynesie Bac Pro Eleec 2017Document26 pages9091 Sujet E2 Polynesie Bac Pro Eleec 2017hassanPas encore d'évaluation
- TP Info IndustrDocument11 pagesTP Info IndustrJACQUES MAGHESAPas encore d'évaluation
- Typologie D'implantation Oumaima AissaouiDocument17 pagesTypologie D'implantation Oumaima AissaouiOumi AissPas encore d'évaluation
- BAC 2015 Sciences de Lingénieur SMBDocument21 pagesBAC 2015 Sciences de Lingénieur SMBfatima zahraPas encore d'évaluation
- Pylone 45 MetresDocument27 pagesPylone 45 MetresMohieddine Amri100% (3)
- Essai A La PlaqueDocument4 pagesEssai A La PlaqueSalim Aleam50% (2)
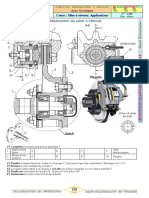
- Freins ApplicationsDocument13 pagesFreins ApplicationsSAAD WAKKASPas encore d'évaluation
- TP4 Mesure de La Résistance Du Béton À La CompressionDocument12 pagesTP4 Mesure de La Résistance Du Béton À La CompressionAymane Rb100% (1)
- TP 6 1 Et 6-2 Essai de TractionDocument3 pagesTP 6 1 Et 6-2 Essai de TractionhamidPas encore d'évaluation
- Efmg4 IAODocument7 pagesEfmg4 IAOIsmail BlackPas encore d'évaluation
- Rapport Oncf 2Document40 pagesRapport Oncf 2aboustif maslouhiPas encore d'évaluation
- Travaux Pratiques de Resistance Des MateDocument21 pagesTravaux Pratiques de Resistance Des Matefatima zohra tahirPas encore d'évaluation
- Essai de Cisaillement PDFDocument4 pagesEssai de Cisaillement PDFMouhamadouPas encore d'évaluation
- Chap1 Notion D'analyseDocument25 pagesChap1 Notion D'analysefokou.simplicegmail.com Fokou SimplicePas encore d'évaluation
- 6117 Enonce DaeDocument5 pages6117 Enonce DaenajibPas encore d'évaluation
- Si TD01 Me EfDocument35 pagesSi TD01 Me Efkhawlanajmi2005Pas encore d'évaluation
- Rapport Table RotativeDocument49 pagesRapport Table RotativeAdam Ben HamoudaPas encore d'évaluation
- Sujet Metropole-Bac-Pro-Melec-Juin-2022Document11 pagesSujet Metropole-Bac-Pro-Melec-Juin-2022petitprePas encore d'évaluation
- Institut Supérieure Des Études TechnologiquesDocument9 pagesInstitut Supérieure Des Études Technologiquesatouf mohammedPas encore d'évaluation
- Chapitre IIIDocument17 pagesChapitre IIIjosephatangana115Pas encore d'évaluation
- 23 Scipcj2g11Document26 pages23 Scipcj2g11LETUDIANT0% (1)
- TP Csi 2010 2011Document31 pagesTP Csi 2010 2011alainPas encore d'évaluation
- Principe Fondamental de La Statique - Le Robot DINODocument6 pagesPrincipe Fondamental de La Statique - Le Robot DINOremyilles6Pas encore d'évaluation
- Manipulation 2 Essai de DurtéDocument5 pagesManipulation 2 Essai de Durtéhidouriabdelmoumen980271% (14)
- Viscosimètre Brookfield Notice Simplifiée (301118)Document8 pagesViscosimètre Brookfield Notice Simplifiée (301118)Irina MariePas encore d'évaluation
- 8779 Sciences de Ingenieur S 2016Document23 pages8779 Sciences de Ingenieur S 2016AFADPas encore d'évaluation
- Étude de Boit Vitesse de Tour VerticalDocument11 pagesÉtude de Boit Vitesse de Tour Verticalilyas aliPas encore d'évaluation
- DS Inst Indust2 Avril 2016 MI4.1Document2 pagesDS Inst Indust2 Avril 2016 MI4.1rajakrifaPas encore d'évaluation
- Agregation Ext 2023 Sii Opt Sii Et Im Epreuve 2Document51 pagesAgregation Ext 2023 Sii Opt Sii Et Im Epreuve 2chahirkhefifi62Pas encore d'évaluation
- 0 Séparateurs DDocument27 pages0 Séparateurs DTtabi VeydiPas encore d'évaluation
- Electrotechnique Fond1 - NebtiDocument32 pagesElectrotechnique Fond1 - NebtiTtabi VeydiPas encore d'évaluation
- Devoir HE33 (20004)Document3 pagesDevoir HE33 (20004)Ttabi VeydiPas encore d'évaluation
- Exercice ch2 5Document2 pagesExercice ch2 5Ttabi VeydiPas encore d'évaluation
- Rc3a9vision Automatique Des Systc3a8mes Mc3a9caniquesDocument201 pagesRc3a9vision Automatique Des Systc3a8mes Mc3a9caniquesTtabi VeydiPas encore d'évaluation
- 12 IntegrationGeneralisee CompletDocument12 pages12 IntegrationGeneralisee CompletTtabi VeydiPas encore d'évaluation
- DS 2Document10 pagesDS 2Ttabi VeydiPas encore d'évaluation
- 15 IntegralesParametre CompletDocument10 pages15 IntegralesParametre CompletTtabi VeydiPas encore d'évaluation
- Cours Des Essais Et Mesures IV 2015 2016.Document18 pagesCours Des Essais Et Mesures IV 2015 2016.Nda JeanPas encore d'évaluation
- IT Cooling SolutionsDocument76 pagesIT Cooling SolutionsazizPas encore d'évaluation
- Pilotage Des ProcessusDocument23 pagesPilotage Des ProcessusChaimae EL MoussaouiPas encore d'évaluation
- 5 Is Liquidation de L ImpotDocument9 pages5 Is Liquidation de L ImpotElbazzaz GhitaPas encore d'évaluation
- Elric! FR - Adv - Le Divertissement de MalberodeDocument5 pagesElric! FR - Adv - Le Divertissement de MalberodeAlkinoosPas encore d'évaluation
- 3 TP HTMLDocument8 pages3 TP HTMLمحمد بورمضانPas encore d'évaluation
- TP 3 - Etude de La Flexion A 3 PointsDocument6 pagesTP 3 - Etude de La Flexion A 3 PointsPrivat ZouobaPas encore d'évaluation
- Cours 1 FCInstrumentationDocument152 pagesCours 1 FCInstrumentationÉnō ŁāPas encore d'évaluation
- Saint-Saens Prelude and Fugue in Eb For Organ Sheet Music in PDFDocument21 pagesSaint-Saens Prelude and Fugue in Eb For Organ Sheet Music in PDFdigitalsheetplusPas encore d'évaluation
- Rougeole CATDocument18 pagesRougeole CATAnonymous nzEFPlPvxJPas encore d'évaluation
- DPBEP 2024 2026 Document PrincipalDocument103 pagesDPBEP 2024 2026 Document Principalmerveilmerveil200Pas encore d'évaluation
- Vision WPBDocument81 pagesVision WPBSucesores de Ortiz de Zárate S.L.Pas encore d'évaluation
- Fiche de Poste - Manager Qualité - Version 1Document2 pagesFiche de Poste - Manager Qualité - Version 1Colombe YohaPas encore d'évaluation
- Examen de Fin de Module Module M02: Les Bases Algorithmiques Date de Passation: 17/02/2022 Nom: PrénomDocument4 pagesExamen de Fin de Module Module M02: Les Bases Algorithmiques Date de Passation: 17/02/2022 Nom: PrénomYassin AbdoPas encore d'évaluation
- Feuille de Présence: Direction Regionale de L'Emploi de Chlef Agence de Wilaya de L'Emploi ChlefDocument1 pageFeuille de Présence: Direction Regionale de L'Emploi de Chlef Agence de Wilaya de L'Emploi ChlefabdoistheonePas encore d'évaluation
- Communication Sur Tableau de BordDocument15 pagesCommunication Sur Tableau de BordHamid Talai100% (1)
- JH - Pmub - Du 18 12 2021Document2 pagesJH - Pmub - Du 18 12 2021Kalif ZerboPas encore d'évaluation
- Projet Ecole IDocument21 pagesProjet Ecole IAugustin Rodrigue TanguenanPas encore d'évaluation
- Fiche Métier: Administrateur de Base de Données: Appellations Couramment UtiliséesDocument34 pagesFiche Métier: Administrateur de Base de Données: Appellations Couramment UtiliséesHenanePas encore d'évaluation
- 2 REQUETE CONJOINTE SEURRE (Modifiã©e)Document12 pages2 REQUETE CONJOINTE SEURRE (Modifiã©e)marieclaudecailhol1Pas encore d'évaluation
- Rapport Pfe m2gc UrDocument26 pagesRapport Pfe m2gc UrAntsatinaPas encore d'évaluation
- Obervation On Civil Registration in Brazzaville - CongoDocument30 pagesObervation On Civil Registration in Brazzaville - CongomaturinPas encore d'évaluation
- Criminelles (Pierre Bellemare)Document271 pagesCriminelles (Pierre Bellemare)zaboub mohamedPas encore d'évaluation
- 2011 Li JingDocument71 pages2011 Li JingAnonymous f0hFc1vaeAPas encore d'évaluation
- LABO IBN SINA Laboratoire D'analyse Médicale À RABAT - Google LocalDocument1 pageLABO IBN SINA Laboratoire D'analyse Médicale À RABAT - Google LocalNada LinaPas encore d'évaluation
- QCM Chap3Document4 pagesQCM Chap3balhooch100% (1)
- FT - To26x60 FRDocument1 pageFT - To26x60 FRmonrmPas encore d'évaluation
- Sport 164Document48 pagesSport 164final65100% (3)
- 5SGUAA5Document49 pages5SGUAA5ebey_endunPas encore d'évaluation
- DEC 3 - Le Mémoire Dexpertise Comptable PDFDocument202 pagesDEC 3 - Le Mémoire Dexpertise Comptable PDFMeryem OumadPas encore d'évaluation
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- La particule de temps: Une approche quantique du tempsD'EverandLa particule de temps: Une approche quantique du tempsPas encore d'évaluation
- Les Êtres Vivants Dépendent De La Mécanique QuantiqueD'EverandLes Êtres Vivants Dépendent De La Mécanique QuantiquePas encore d'évaluation
- Les singularités comme limites ontologiques de la relativité généraleD'EverandLes singularités comme limites ontologiques de la relativité généralePas encore d'évaluation
- Du Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfD'EverandDu Néant à la Formule Universelle et retour: La structure des particules élémentaires XIIIfPas encore d'évaluation