Vous aimerez peut-être aussi
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Sujet 08 NCDocument44 pagesSujet 08 NCStephane DelaportasPas encore d'évaluation
- Sujet 0 STI2D LGV CorrigeDocument30 pagesSujet 0 STI2D LGV Corrigeមើលរឿងភាគគ្រប់ប្រភេទPas encore d'évaluation
- 2FI 15-16 RatDocument4 pages2FI 15-16 RatEl GhafraouiPas encore d'évaluation
- LyceeGT SujetO1 STI2D Tle Version1 218521Document22 pagesLyceeGT SujetO1 STI2D Tle Version1 218521patrice.vergnePas encore d'évaluation
- Touil Rakotomanonjy Tshinkobo BoumedieneDocument8 pagesTouil Rakotomanonjy Tshinkobo Boumedienewafae TouilPas encore d'évaluation
- Thèsea 5Document21 pagesThèsea 5lkmkmlkPas encore d'évaluation
- U11 DTR 2017 MeiDocument12 pagesU11 DTR 2017 Meimohand amitouchePas encore d'évaluation
- ENGEES00ScIngPSI-e 2000Document10 pagesENGEES00ScIngPSI-e 2000taruffiPas encore d'évaluation
- Chantier Portique N°6 Sujet ADocument9 pagesChantier Portique N°6 Sujet APÉRISCOPE. exePas encore d'évaluation
- Epreuve de Mécanique App Tle F4 Seq 2Document4 pagesEpreuve de Mécanique App Tle F4 Seq 2Onguetou Jules100% (4)
- MembraneDocument14 pagesMembraneImene HarbaouiPas encore d'évaluation
- Fin de Formation - Synthése ESA 2022 (TEST3) - 1Document6 pagesFin de Formation - Synthése ESA 2022 (TEST3) - 1otmane touilPas encore d'évaluation
- 94 Sujet 0 Sti2d LGV Elements de Questionnements CorrigesDocument34 pages94 Sujet 0 Sti2d LGV Elements de Questionnements CorrigesonePas encore d'évaluation
- DS T2 1tsi3Document7 pagesDS T2 1tsi3Youssef El FahimePas encore d'évaluation
- Corrigé DExamen de Dds 1ère Année MasterDocument6 pagesCorrigé DExamen de Dds 1ère Année Masterrami feki100% (2)
- Coll1 2013 Bielles TirantsDocument42 pagesColl1 2013 Bielles TirantsMouhameth SOWPas encore d'évaluation
- Examen Becm 2018 Pass PDFDocument9 pagesExamen Becm 2018 Pass PDFSoűFiane HãnnāøuiPas encore d'évaluation
- DC Mei E11 e 2022 CopieDocument13 pagesDC Mei E11 e 2022 CopieChokri AtefPas encore d'évaluation
- Contrôle 2 - 2022Document11 pagesContrôle 2 - 2022Bilal LaakelPas encore d'évaluation
- DT1Document6 pagesDT1bobbyuiPas encore d'évaluation
- CCTPEDocument334 pagesCCTPEgPas encore d'évaluation
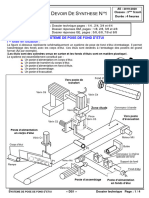
- Devoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem AbdelkarimDocument11 pagesDevoir de Synthèse N°1 - Technologie CHAINE D'EMBALLAGE DES FEUILLES DE PAPIER - Bac Technique (2012-2013) MR Hadjkacem Abdelkarimيس المباركيPas encore d'évaluation
- Cours Convertisseurs 2LTIC-IoT Chap4Document10 pagesCours Convertisseurs 2LTIC-IoT Chap4Ahmed TriguiPas encore d'évaluation
- Les Conduits Électriques PDFDocument9 pagesLes Conduits Électriques PDFyoussefPas encore d'évaluation
- Examen BlancDocument14 pagesExamen BlancFerdinand SEME100% (1)
- DC1 3st DT 2014Document3 pagesDC1 3st DT 2014Nejib JallouliPas encore d'évaluation
- LONGVIC - Note de Calcul Passerelle 12mDocument36 pagesLONGVIC - Note de Calcul Passerelle 12mHadi KrimPas encore d'évaluation
- DiagDocument9 pagesDiagDjamila Haddi100% (1)
- Retour ONEE Note N°043Document3 pagesRetour ONEE Note N°043Best of game playPas encore d'évaluation
- Epreuve E42 Bts Elec 2018 SujetDocument16 pagesEpreuve E42 Bts Elec 2018 SujetJoël ChrétienPas encore d'évaluation
- Sujet - Lève Personne - ÉlèveDocument10 pagesSujet - Lève Personne - ÉlèveremivsnPas encore d'évaluation
- Dimensionnemnt Appareils AppuiDocument5 pagesDimensionnemnt Appareils AppuiKevin AtebaPas encore d'évaluation
- Manipe 3 - Contraintes Sur Une PoutreDocument6 pagesManipe 3 - Contraintes Sur Une PoutrelilyssaaPas encore d'évaluation
- Schemas: ElectrotecllniqueDocument130 pagesSchemas: ElectrotecllniqueEl-hai MANDILOU100% (1)
- TP 20 - Modélisation Et Étude Cinématique (OUVRE PORTAIL AVIDSEN) REDIER CyrilDocument12 pagesTP 20 - Modélisation Et Étude Cinématique (OUVRE PORTAIL AVIDSEN) REDIER CyrilCyril REDIERPas encore d'évaluation
- 2-Dossier Travail DemandDocument11 pages2-Dossier Travail Demandjuliette ravinetPas encore d'évaluation
- 4 TD2 Regime ITDocument4 pages4 TD2 Regime ITAIT HSAIN SAIDPas encore d'évaluation
- VERSION FINALE D.Tech DS1 2019 2020Document3 pagesVERSION FINALE D.Tech DS1 2019 2020Bouabdellaoui saif ennasrPas encore d'évaluation
- File - 648ad4a65a7f3 - EPREUVE BEPC 2023 PCT CAMEROUNDocument2 pagesFile - 648ad4a65a7f3 - EPREUVE BEPC 2023 PCT CAMEROUNpakeuyankwaPas encore d'évaluation
- DC Ccsoa 2016Document5 pagesDC Ccsoa 2016molk kallelPas encore d'évaluation
- 5 CivilDocument10 pages5 CivilNesrine ZOUBEIDIPas encore d'évaluation
- 1239 - Eurobloc Technical GuideDocument55 pages1239 - Eurobloc Technical GuideSiding BarroPas encore d'évaluation
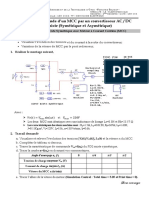
- Chap4 Convertisseurs Pour MCCDocument5 pagesChap4 Convertisseurs Pour MCCYoussef ELPas encore d'évaluation
- Devoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Document10 pagesDevoir de Contrôle N°3 2009 2010 (Ibn Rachiq Ezzahra)Manu CocoPas encore d'évaluation
- DiapoDocument65 pagesDiapoZouhirPas encore d'évaluation
- Chapitre 11 Poutres Continues Methode de CaquotaDocument30 pagesChapitre 11 Poutres Continues Methode de CaquotaSalah MihoubiPas encore d'évaluation
- Meca RDM 1mispDocument10 pagesMeca RDM 1mispAbi ClémentPas encore d'évaluation
- Etude Protection CathodiqueDocument32 pagesEtude Protection CathodiqueH_DEBIANE75% (4)
- NDC 7034 - Ind C Justification Du Mur en L de La Passerelle VIERENDEEL MaisonsssDocument15 pagesNDC 7034 - Ind C Justification Du Mur en L de La Passerelle VIERENDEEL MaisonsssMichel Mix TankouPas encore d'évaluation
- Sujet 10Document54 pagesSujet 10Stephane DelaportasPas encore d'évaluation
- 3802 Elements de Corrige Sous Epreuve E21 Bacpro MM Option B Septembre 2013 - 0Document9 pages3802 Elements de Corrige Sous Epreuve E21 Bacpro MM Option B Septembre 2013 - 0Anne Talleux VétuPas encore d'évaluation
- MINESEC MécaA 1èref4 ProbatZéro 2022Document3 pagesMINESEC MécaA 1èref4 ProbatZéro 2022ousseinilemilemsiiiPas encore d'évaluation
- LPP13 Transport Et Securite ProfDocument4 pagesLPP13 Transport Et Securite ProfmeriamPas encore d'évaluation
- Semin TP2019Document54 pagesSemin TP2019Othman MohammedPas encore d'évaluation
- Nnales de La Faculté Des Sciences de Oulouse: C C D E M GDocument146 pagesNnales de La Faculté Des Sciences de Oulouse: C C D E M GAymen BouroubaPas encore d'évaluation
- RigiditéDocument10 pagesRigiditéMohamedPas encore d'évaluation
- Annales Electrotechnique 5Document96 pagesAnnales Electrotechnique 5Aladji SyPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Cours - Optimisation Transport ElectriciteDocument3 pagesCours - Optimisation Transport ElectriciteStephane DelaportasPas encore d'évaluation
- 4 - Document 3 ÉlèveDocument1 page4 - Document 3 ÉlèveStephane DelaportasPas encore d'évaluation
- 2 - Document 1 ÉlèveDocument1 page2 - Document 1 ÉlèveStephane DelaportasPas encore d'évaluation
- 3 - Document 2 ÉlèveDocument1 page3 - Document 2 ÉlèveStephane DelaportasPas encore d'évaluation
- 1 - Reseau ÉlèveDocument4 pages1 - Reseau ÉlèveStephane DelaportasPas encore d'évaluation
- 4 - Document 3 ÉlèveDocument1 page4 - Document 3 ÉlèveStephane DelaportasPas encore d'évaluation
- 1 - Reseau ÉlèveDocument4 pages1 - Reseau ÉlèveStephane DelaportasPas encore d'évaluation
- 2 - Document 1 ÉlèveDocument1 page2 - Document 1 ÉlèveStephane DelaportasPas encore d'évaluation
- Sujet 10Document54 pagesSujet 10Stephane DelaportasPas encore d'évaluation
- Sujet 10 NCDocument49 pagesSujet 10 NCStephane DelaportasPas encore d'évaluation
- Sujet 09Document49 pagesSujet 09Stephane DelaportasPas encore d'évaluation
- Sujet 09 NCDocument50 pagesSujet 09 NCStephane DelaportasPas encore d'évaluation
- Sujet 09 NCDocument50 pagesSujet 09 NCStephane DelaportasPas encore d'évaluation
- Sujet 10 NCDocument49 pagesSujet 10 NCStephane DelaportasPas encore d'évaluation
- Sujet 09Document49 pagesSujet 09Stephane DelaportasPas encore d'évaluation
- Sujet 10Document54 pagesSujet 10Stephane DelaportasPas encore d'évaluation
- Mesure ElectriqueDocument15 pagesMesure ElectriqueOussama Souid100% (1)
- 5 Interfacage Des Circuits NumeriquesDocument3 pages5 Interfacage Des Circuits NumeriquesMirado Ram'sPas encore d'évaluation
- Examen A Distance 2022 2023Document2 pagesExamen A Distance 2022 2023issa issoPas encore d'évaluation
- Mon ProjetDocument19 pagesMon ProjetMidou GasmiPas encore d'évaluation
- Examen Final (2 Heures Documents, Portable, Calculette Non Autorisés)Document4 pagesExamen Final (2 Heures Documents, Portable, Calculette Non Autorisés)Joni ShPas encore d'évaluation
- Compte RenduDocument5 pagesCompte RenduAlaa MessaoudPas encore d'évaluation
- COURS00 Capteur Industriel EDocument42 pagesCOURS00 Capteur Industriel Eabdelkader bouchikhiPas encore d'évaluation
- .. CoursBTEdite DP - Circuits SpecialisesDocument4 pages.. CoursBTEdite DP - Circuits SpecialisesStoph VlogPas encore d'évaluation
- CHAPITRE 2 (Transmission Des Signaux)Document24 pagesCHAPITRE 2 (Transmission Des Signaux)Majdi RhimPas encore d'évaluation
- Exemples de SMS de Notification Pour Les MairiesDocument3 pagesExemples de SMS de Notification Pour Les MairiesYoussouf konatePas encore d'évaluation
- Amplificateur Opérationel Parfait: Présenter Par: Benyamoun IsmailDocument11 pagesAmplificateur Opérationel Parfait: Présenter Par: Benyamoun IsmailBenYamOuN IsMaIlPas encore d'évaluation
- II-Réseaux Électriques en Régime Transitoire: 2.1-Echelon de TensionDocument7 pagesII-Réseaux Électriques en Régime Transitoire: 2.1-Echelon de TensionMazama-Esso Moddoh OclooPas encore d'évaluation
- EP CoursDocument126 pagesEP CoursBensalemPas encore d'évaluation
- Chapitre.i TVDocument7 pagesChapitre.i TVradjaaPas encore d'évaluation
- FX808394F FlexES Control FX10 (10 Boucles)Document1 pageFX808394F FlexES Control FX10 (10 Boucles)Ramdane RamdanoPas encore d'évaluation
- Republique Du Benin Ministere de L'Ensseignement Public Privee Et de La Formation Generale Expose de StageDocument8 pagesRepublique Du Benin Ministere de L'Ensseignement Public Privee Et de La Formation Generale Expose de StageCHRISTPas encore d'évaluation
- PJ 1793Document4 pagesPJ 1793koyabePas encore d'évaluation
- Resum Cours 1Document5 pagesResum Cours 1KdiPas encore d'évaluation
- Serie 2 - s2 - 1apicDocument1 pageSerie 2 - s2 - 1apicchaihabfatimaezzahra2002Pas encore d'évaluation
- Techniques de Commande DTC-SVM Appliquées À La Machine AsynchronDocument69 pagesTechniques de Commande DTC-SVM Appliquées À La Machine AsynchronAbd Elwadood YahiaouiPas encore d'évaluation
- Circuit Demagnetisation TVDocument5 pagesCircuit Demagnetisation TVAtef StiliPas encore d'évaluation
- TP5 - PD2 - Symétrique - Gating Block - MCC - Avec Compte RenduDocument2 pagesTP5 - PD2 - Symétrique - Gating Block - MCC - Avec Compte RenduFifi La MarionnettePas encore d'évaluation
- TP3 Variation Vitesse Moteur Courant Continu Redressement PD2 PDFDocument7 pagesTP3 Variation Vitesse Moteur Courant Continu Redressement PD2 PDFservice électricité bâtimentPas encore d'évaluation
- Relais 504 FRDocument2 pagesRelais 504 FRحمزة بوخالفيPas encore d'évaluation
- Schneider Electric - ComPacT-NSX-nouvelle-génération - C16B4TM160Document4 pagesSchneider Electric - ComPacT-NSX-nouvelle-génération - C16B4TM160Ray EmmaPas encore d'évaluation
- CAPTEURSDocument21 pagesCAPTEURSSalissou SalhaPas encore d'évaluation
- ARTECHE CT trafpvtHT FRDocument8 pagesARTECHE CT trafpvtHT FRRahime OUMAROUPas encore d'évaluation
- FrajcgfgDocument13 pagesFrajcgfgmliki mohamedPas encore d'évaluation
- TP T.SDocument56 pagesTP T.SYounes MozayinePas encore d'évaluation
- Machine À Courant ContinuDocument6 pagesMachine À Courant Continukhawla lamcharfiPas encore d'évaluation