Vous aimerez peut-être aussi
- Rapporte Des Travaux Pratiques Les CapteDocument16 pagesRapporte Des Travaux Pratiques Les CapteHachem BelouafiPas encore d'évaluation
- Rapport de Travaux Pratiques Capteurs Et InterfaçageDocument24 pagesRapport de Travaux Pratiques Capteurs Et InterfaçageYacine89% (9)
- Sequence 4Document12 pagesSequence 4Dalia HADDARPas encore d'évaluation
- Atc 2022-2023Document96 pagesAtc 2022-2023Oh HichamPas encore d'évaluation
- 2ATC EleveDocument94 pages2ATC EleveFarid OufqirPas encore d'évaluation
- Capteur IntelligentDocument18 pagesCapteur IntelligentAmina BenPas encore d'évaluation
- Chaine de MesureDocument7 pagesChaine de MesureOthman Nasri100% (1)
- Thermométre À Base Du PIC16F877Document37 pagesThermométre À Base Du PIC16F877Hachemi Bhe87% (15)
- HamidDocument12 pagesHamidAbdelhamid Midou Hafiane100% (1)
- Capteur A TractionDocument12 pagesCapteur A TractionOualid HarroudPas encore d'évaluation
- Compte Rendu TP Indicateur de TempératureDocument16 pagesCompte Rendu TP Indicateur de TempératureYounes Habbouli100% (1)
- TP 1 - Capteur de Température: Nom Et Prénom: GroupeDocument4 pagesTP 1 - Capteur de Température: Nom Et Prénom: GroupeLoïc Fabien Nana NtainkehPas encore d'évaluation
- Modimpulsion PDFDocument10 pagesModimpulsion PDFAsmaa AlaouiPas encore d'évaluation
- Sujet PADocument14 pagesSujet PAAyman LamzouriPas encore d'évaluation
- Rapport_de_CapteursDocument40 pagesRapport_de_CapteursfranckPas encore d'évaluation
- 828 Lescapteurs 2 SteDocument10 pages828 Lescapteurs 2 SteichoualanePas encore d'évaluation
- TP Cao Electronique 1 - 230921 - 111416 - 230921 - 120514Document7 pagesTP Cao Electronique 1 - 230921 - 111416 - 230921 - 120514Mohamed CharradaPas encore d'évaluation
- Examen Final MC43: Utbm Département Energie Printemps 2017Document6 pagesExamen Final MC43: Utbm Département Energie Printemps 2017Letoile SaraPas encore d'évaluation
- RAPPORT2 - Pfe Ardouino PDFDocument30 pagesRAPPORT2 - Pfe Ardouino PDFEslem IslamPas encore d'évaluation
- TP Regime IT Et MoteurDocument10 pagesTP Regime IT Et MoteurIssa Baba OuedraogoPas encore d'évaluation
- TP - Capteurs MMSS 2017 2018 - 2Document12 pagesTP - Capteurs MMSS 2017 2018 - 2simo100% (1)
- Capteur RésuméDocument12 pagesCapteur RésuméFadwa GHANIPas encore d'évaluation
- Atc Ste PDFDocument89 pagesAtc Ste PDFAnaseYousbi100% (3)
- Appareils de Protection Partie 2 Corrigé 2Document11 pagesAppareils de Protection Partie 2 Corrigé 2Tonprince Knight Ad100% (1)
- Turbidimetre Electronique PDFDocument40 pagesTurbidimetre Electronique PDFMohamed Zied ChaariPas encore d'évaluation
- TP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou AfanouDocument11 pagesTP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou AfanouHamid BendjelloulPas encore d'évaluation
- TP-Hacheur-2022Document11 pagesTP-Hacheur-2022cherni.youssef69Pas encore d'évaluation
- Theme2 BenkacemDocument11 pagesTheme2 BenkacemMehdi BKPas encore d'évaluation
- Cours Capteurs - Version ProfDocument5 pagesCours Capteurs - Version ProfzanarutoPas encore d'évaluation
- Exam PrincipalDocument19 pagesExam PrincipalAymane AbdenourPas encore d'évaluation
- DS2019Document11 pagesDS2019Charles Thierry DIBAO ESSAKAPas encore d'évaluation
- TP 2elnDocument7 pagesTP 2elnbendjeddou ammarPas encore d'évaluation
- CapteursDocument6 pagesCapteursAlain JobsPas encore d'évaluation
- Devoir ÉlectriqueDocument2 pagesDevoir ÉlectriqueFouad Abatouy0% (1)
- TDs CI Capteurs TempératureDocument7 pagesTDs CI Capteurs Températureghizlane el bouzidiPas encore d'évaluation
- TP Instrumentation Et MétrologieDocument6 pagesTP Instrumentation Et Métrologieboukredimidjamel1958Pas encore d'évaluation
- Capteurs PDFDocument5 pagesCapteurs PDFAbdelkhalek BouananiPas encore d'évaluation
- ChapitreII - Les - Interrupteurs - Semiconducteurs ++++Document10 pagesChapitreII - Les - Interrupteurs - Semiconducteurs ++++hb1966Pas encore d'évaluation
- Capteurs_frDocument8 pagesCapteurs_frleroy makita loubakiPas encore d'évaluation
- Faculté de Technologie: Département Ingénierie Des Systèmes Electriques Compte RendueDocument23 pagesFaculté de Technologie: Département Ingénierie Des Systèmes Electriques Compte Renduem.boudraaPas encore d'évaluation
- Wahid DerouicheDocument27 pagesWahid DerouicheNâs RôPas encore d'évaluation
- CHP IV - Conditionnement Du Signal Du Capteur1Document62 pagesCHP IV - Conditionnement Du Signal Du Capteur1el ibraPas encore d'évaluation
- Chapitre I - Généralités Sur L'électrDocument21 pagesChapitre I - Généralités Sur L'électrD BENDIBPas encore d'évaluation
- Rapport TP) 2020Document45 pagesRapport TP) 2020KAWTAR EL AMRIPas encore d'évaluation
- Projet (Examen Pratique Des Microprocesseurs) INGC1 2018-2019Document1 pageProjet (Examen Pratique Des Microprocesseurs) INGC1 2018-2019abdelgansonre706Pas encore d'évaluation
- CR de Capteur Intelligent PDFDocument17 pagesCR de Capteur Intelligent PDFSimo AbkariPas encore d'évaluation
- MV 19 EnonceDocument9 pagesMV 19 EnonceGueye OusmanePas encore d'évaluation
- Chapitre IV SuiteDocument11 pagesChapitre IV SuiteJoseph ItakalaPas encore d'évaluation
- TABLE OF CONTENTSDocument14 pagesTABLE OF CONTENTSDilekh AnisPas encore d'évaluation
- TP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou AfanouDocument11 pagesTP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou Afanoukima lachgarPas encore d'évaluation
- TD Electronique Et Arduino 2018-2019Document22 pagesTD Electronique Et Arduino 2018-2019Abdel HassibPas encore d'évaluation
- Présentation de ProjetDocument61 pagesPrésentation de Projetslim yaichPas encore d'évaluation
- Capt EursDocument7 pagesCapt EursAyoub ShaitPas encore d'évaluation
- Ch2 - Méthodes de MesuresDocument29 pagesCh2 - Méthodes de MesuresYoucef AissaPas encore d'évaluation
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- 2 - Indice de FluiditeDocument3 pages2 - Indice de Fluiditeamani.arfaoui1991Pas encore d'évaluation
- Corrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonDocument10 pagesCorrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonSabo100% (1)
- 03-Animation Prise TerreDocument15 pages03-Animation Prise TerreLinda batolaPas encore d'évaluation
- THMOPQ - 04 Travail de Compression Adiabatique Reversible PDFDocument2 pagesTHMOPQ - 04 Travail de Compression Adiabatique Reversible PDFBertin KamsipaPas encore d'évaluation
- Poussée D'archimède - WikipédiaDocument51 pagesPoussée D'archimède - WikipédiaFidele N'gnaorePas encore d'évaluation
- Turbine À VapeurDocument59 pagesTurbine À VapeurHadjer Zitoune100% (1)
- MDF 3Document8 pagesMDF 3fatma zohra hafsaouiPas encore d'évaluation
- Chapitre1 2Document36 pagesChapitre1 2Mohammed HachemiPas encore d'évaluation
- Bételgeuse - Salsa JDocument10 pagesBételgeuse - Salsa JFabien LegeronPas encore d'évaluation
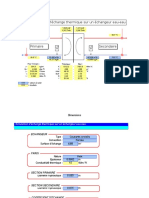
- Simulation Echangeurs Pour KarimDocument8 pagesSimulation Echangeurs Pour KarimYassine BouaichiPas encore d'évaluation
- Inerie Fleche Poutre Acier AluDocument5 pagesInerie Fleche Poutre Acier AluNgouoPas encore d'évaluation
- Filtre Actif PassifDocument8 pagesFiltre Actif PassifZiko Jay AndaloussiPas encore d'évaluation
- Mesure Hydraulique PotentiometreDocument47 pagesMesure Hydraulique Potentiometreghiz-Pas encore d'évaluation
- Examen de TP Flexion 3 Points 2020 PDFDocument8 pagesExamen de TP Flexion 3 Points 2020 PDFAmara JoubidPas encore d'évaluation
- Les Premiers Travaux de Jean-Pierre Vigier Sur La Théorie Des Quanta: Une Rencontre Entre Science Et Marxisme (1951-1954)Document111 pagesLes Premiers Travaux de Jean-Pierre Vigier Sur La Théorie Des Quanta: Une Rencontre Entre Science Et Marxisme (1951-1954)virgile_bessonPas encore d'évaluation
- HF020Document4 pagesHF020saif2020Pas encore d'évaluation
- Introduction Cours PhysStat1Document9 pagesIntroduction Cours PhysStat1fayza mezrhabPas encore d'évaluation
- Leçon 1: Atome D'hydrogène Spining Et Précession Résonance Excitation Et Relaxation Génération Du Signal (FID)Document144 pagesLeçon 1: Atome D'hydrogène Spining Et Précession Résonance Excitation Et Relaxation Génération Du Signal (FID)Mohamed SeyidPas encore d'évaluation
- Cours - Sciences Physiques Adaptation Récepteur - Générateur - 2ème Sciences (2013-2014) MR Sakhraoui Noureddine PDFDocument2 pagesCours - Sciences Physiques Adaptation Récepteur - Générateur - 2ème Sciences (2013-2014) MR Sakhraoui Noureddine PDFRAY EVOLUTIONPas encore d'évaluation
- Chapitre 2Document12 pagesChapitre 2anasPas encore d'évaluation
- Phys 1ere C Minisession Av2022Document4 pagesPhys 1ere C Minisession Av2022Ngouen AnouarPas encore d'évaluation
- ÉlectrostatiqueDocument7 pagesÉlectrostatiqueBenchettah OumaimaPas encore d'évaluation
- 5 Statique Plane Am1Document17 pages5 Statique Plane Am1YonnePas encore d'évaluation
- Ae Di Conservation Dans Un Changement D EtatDocument5 pagesAe Di Conservation Dans Un Changement D EtatamirPas encore d'évaluation
- Chimie: Première Partie: Étude de La Pile Zinc-NickelDocument2 pagesChimie: Première Partie: Étude de La Pile Zinc-Nickelyaasir ouukesoPas encore d'évaluation
- Ensa Hociema - Poster - SOUMAYA ELJANOUS - JR21Document5 pagesEnsa Hociema - Poster - SOUMAYA ELJANOUS - JR21ElJanousSoumayaPas encore d'évaluation
- Partie Evaluations Des Ressources 15Pts Exercice 1 Pts Considère Dans L'équationDocument2 pagesPartie Evaluations Des Ressources 15Pts Exercice 1 Pts Considère Dans L'équationyvesyacinthendjoh1234Pas encore d'évaluation
- Physique Seconde C by Jean Cessac Georges TréherneDocument292 pagesPhysique Seconde C by Jean Cessac Georges TréherneEndjy Laguerre100% (2)
- RDM NotationsDocument1 pageRDM Notationsbtp formationPas encore d'évaluation
- Chapitre 1 - Introduction A La Theorie Des CordesDocument16 pagesChapitre 1 - Introduction A La Theorie Des Cordesivan kikungaPas encore d'évaluation