Vous aimerez peut-être aussi
- Cours 1 Diagrammed e FluenceDocument41 pagesCours 1 Diagrammed e Fluencejihadmak100% (2)
- Chap IIDocument19 pagesChap IIprojectpodnewPas encore d'évaluation
- GRAFCET Et AutomatismeDocument41 pagesGRAFCET Et AutomatismeEden Ben80% (5)
- Représentation D'état - WikipédiaDocument15 pagesReprésentation D'état - Wikipédiahassen baccarPas encore d'évaluation
- Theorie de Systeme-Chapitre 01Document14 pagesTheorie de Systeme-Chapitre 01Sab RinaPas encore d'évaluation
- Performances D'un Système AsserviDocument8 pagesPerformances D'un Système AsserviIlyess HamdiPas encore d'évaluation
- Formation GRAFCET Cours 13 PDFDocument42 pagesFormation GRAFCET Cours 13 PDFPaul DayangPas encore d'évaluation
- Systemes SequDocument3 pagesSystemes SequMohamed NaciriPas encore d'évaluation
- Representation DetatDocument5 pagesRepresentation DetatAbdeldjalil MebarkiPas encore d'évaluation
- Command 2 EmeDocument9 pagesCommand 2 Emeabdousewager8080Pas encore d'évaluation
- Introduction Aux SéquentielsDocument2 pagesIntroduction Aux SéquentielsMak HimPas encore d'évaluation
- DéfinitionDocument21 pagesDéfinitionalimaPas encore d'évaluation
- Chapitre 6-Représentation Détat Dun Système ContinuDocument21 pagesChapitre 6-Représentation Détat Dun Système ContinuIbtissem DERRARPas encore d'évaluation
- Licence Eln Machines 12-13Document22 pagesLicence Eln Machines 12-13Paypal RezultPas encore d'évaluation
- Chapitre 1Document6 pagesChapitre 1Khelif HichemPas encore d'évaluation
- AUT202 TDInfo1 CorrectionDocument25 pagesAUT202 TDInfo1 CorrectionBony KOMBOPas encore d'évaluation
- Introduction REDocument17 pagesIntroduction REHASSAN CR and COCPas encore d'évaluation
- INTRODUCTIONDocument4 pagesINTRODUCTIONBoutayna FassekhPas encore d'évaluation
- Modélisation Des SystèmesDocument7 pagesModélisation Des Systèmestenere comPas encore d'évaluation
- Modélisation Des SystèmesDocument11 pagesModélisation Des SystèmesA.BenhariPas encore d'évaluation
- Chapitre1 Systemes Logiques2 PDFDocument22 pagesChapitre1 Systemes Logiques2 PDFAziz-nadalGaddourPas encore d'évaluation
- Cours Automatique Leçon 1Document15 pagesCours Automatique Leçon 1Cheikh ThiamPas encore d'évaluation
- Etudes Des Systèmes DynamiquesDocument13 pagesEtudes Des Systèmes DynamiquesIlyess HamdiPas encore d'évaluation
- Chapitre 2Document9 pagesChapitre 2eyaPas encore d'évaluation
- Poly SSQA ESIPE 2022Document19 pagesPoly SSQA ESIPE 2022Jamal ZrPas encore d'évaluation
- Introduction À L'automatiqueDocument4 pagesIntroduction À L'automatiquebadro1980Pas encore d'évaluation
- Cours Master PDFDocument42 pagesCours Master PDFOD ELPas encore d'évaluation
- Chapitre VIIDocument47 pagesChapitre VIINdeye Thiaba FALLPas encore d'évaluation
- Commande Des Systèmes Linéaires ContinusDocument156 pagesCommande Des Systèmes Linéaires ContinusThinhinane KaguyaPas encore d'évaluation
- Partie I Representation DetatDocument17 pagesPartie I Representation DetatNouraPas encore d'évaluation
- CH1 SL2 2023Document23 pagesCH1 SL2 2023amenmhedhbiiPas encore d'évaluation
- Cours Nechadi Emira Systemes Non LineairesDocument44 pagesCours Nechadi Emira Systemes Non LineairesDamon Salvatore100% (1)
- CR TP ReDocument18 pagesCR TP ReWissal AntraPas encore d'évaluation
- Bekhouche Hassiba Lachgar Hakima: Commande Par Retour D'état Du Système DiscretDocument17 pagesBekhouche Hassiba Lachgar Hakima: Commande Par Retour D'état Du Système Discretkima lachgarPas encore d'évaluation
- Stabilité Des Systèmes LineairesDocument25 pagesStabilité Des Systèmes LineairesMehrez Gabga100% (1)
- Automatique LiniéaireDocument99 pagesAutomatique Liniéaireatoha007Pas encore d'évaluation
- BasculesDocument19 pagesBasculesMahdi LahdiliPas encore d'évaluation
- Cours MasterDocument42 pagesCours MasterWilfriedPas encore d'évaluation
- Miniporjet MarkovDocument16 pagesMiniporjet Markovneroune100% (1)
- 10-Problème de Logique CombinatoireDocument2 pages10-Problème de Logique Combinatoirekouassinehemie320Pas encore d'évaluation
- AutomatiqueDocument94 pagesAutomatiqueeddabilihajar2002Pas encore d'évaluation
- SLCI ResumeDocument16 pagesSLCI Resumesoufiane8fkaPas encore d'évaluation
- 12.logique Sequentielle EtudiantDocument21 pages12.logique Sequentielle EtudiantAymaniJuventunoPas encore d'évaluation
- SysysesyDocument7 pagesSysysesyAZEDDINEPas encore d'évaluation
- Chap - 02 - Modélisation Des Systã©mes Lineaires - 2Document56 pagesChap - 02 - Modélisation Des Systã©mes Lineaires - 2Simo LawiniPas encore d'évaluation
- Chapitre 2:: Modélisation Et Identification Des Systèmes en Boucle Ouverte Et FerméeDocument104 pagesChapitre 2:: Modélisation Et Identification Des Systèmes en Boucle Ouverte Et Ferméekaoutaramr8Pas encore d'évaluation
- Cours Auto Chakir PDFDocument33 pagesCours Auto Chakir PDFOmar El kachachPas encore d'évaluation
- TP N°1: Etude Des Systèmes Dans L'espace D'état Sous Matlab Et SimulinkDocument11 pagesTP N°1: Etude Des Systèmes Dans L'espace D'état Sous Matlab Et Simulinkkuetecedric0Pas encore d'évaluation
- Chapitre 2 Representation 2223 Gesi Roi BonDocument18 pagesChapitre 2 Representation 2223 Gesi Roi BonDrixPas encore d'évaluation
- Chapitre 3 Commande Par Retour D'état PDFDocument5 pagesChapitre 3 Commande Par Retour D'état PDFFalet Ouakar LeghelimiPas encore d'évaluation
- AutomatiqueDocument99 pagesAutomatiquebastaouiiPas encore d'évaluation
- SYSTEMEDocument11 pagesSYSTEMEhoggadPas encore d'évaluation
- TP 0 MatlabDocument27 pagesTP 0 MatlabZaroui Benamor AliPas encore d'évaluation
- Les Composantes SymétriquesDocument23 pagesLes Composantes SymétriquesSofiane ChouPas encore d'évaluation
- Doctrine Distribution - VERSION FINALEDocument44 pagesDoctrine Distribution - VERSION FINALEGUY-FABRE DJILE100% (1)
- CCNA 4 Essentiel PDFDocument58 pagesCCNA 4 Essentiel PDFYAPOFREDPas encore d'évaluation
- CCNA Support v2.5Document155 pagesCCNA Support v2.5bhoye88Pas encore d'évaluation
- Code Binaire NaturelDocument5 pagesCode Binaire NaturelGUY-FABRE DJILEPas encore d'évaluation
- Rapport de Travaux Reflectometrie - Poste 225 BokeDocument2 pagesRapport de Travaux Reflectometrie - Poste 225 BokeGUY-FABRE DJILEPas encore d'évaluation
- Examen de Fin de Formation 2008 Tsri Pratique Variante 9Document5 pagesExamen de Fin de Formation 2008 Tsri Pratique Variante 9FatimaLEPas encore d'évaluation
- Howto L3 IntervlanroutingDocument7 pagesHowto L3 IntervlanroutingWilford ToussaintPas encore d'évaluation
- Algèbre 1 V. Def 2017-2018Document141 pagesAlgèbre 1 V. Def 2017-2018Alexis Rosuel100% (1)
- Chapitre 1 - Eléments de Physique NucléaireDocument69 pagesChapitre 1 - Eléments de Physique NucléaireMohamed El Hadi Redjaimia100% (1)
- ChapitreDocument8 pagesChapitreAchour IfrekPas encore d'évaluation
- Cours ExcelDocument80 pagesCours ExcelLahcen Boufouss100% (1)
- Ajust ExpoDocument4 pagesAjust ExpoMme_Sos100% (1)
- W - 250 - 275 - 325 - 350 - 400 - 1 K..p..Document28 pagesW - 250 - 275 - 325 - 350 - 400 - 1 K..p..joviadoPas encore d'évaluation
- GPM Tle C 3e Edition.Document258 pagesGPM Tle C 3e Edition.Pierrot Jules AMOUSSOU100% (2)
- UE Cybersécurité-Initiation Metasploit v0.3Document17 pagesUE Cybersécurité-Initiation Metasploit v0.3didierPas encore d'évaluation
- Cahier de Charge Du ProjetDocument4 pagesCahier de Charge Du ProjetMehdi KhaledPas encore d'évaluation
- TP 1Document1 pageTP 1djennati100% (1)
- Serco FDocument26 pagesSerco FRV PenrroiPas encore d'évaluation
- Sujet Bac 2023 Guinee Niger MathsDocument5 pagesSujet Bac 2023 Guinee Niger Mathsmr.4chiffrePas encore d'évaluation
- Unite 71 Manuel OpératoireDocument110 pagesUnite 71 Manuel OpératoireAbdessalem Bougoffa50% (2)
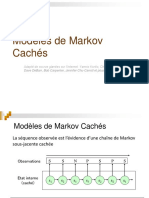
- 3 - Modeles de Markov CachesDocument34 pages3 - Modeles de Markov CachesWISSALPas encore d'évaluation
- TD6 PhysiqueDocument4 pagesTD6 PhysiqueEric DeumoPas encore d'évaluation
- Poly JavaDocument176 pagesPoly JavaLeonzoConstantiniPas encore d'évaluation
- Mémoire de Master-YF-Post Soutenance-20200610Document70 pagesMémoire de Master-YF-Post Soutenance-20200610Yacinthe FAYE100% (1)
- Exercices Chapitre 3 FractionsDocument3 pagesExercices Chapitre 3 FractionsTony GRACAPas encore d'évaluation
- Geometrie Pour Dao2 PDFDocument161 pagesGeometrie Pour Dao2 PDFlekouf43100% (1)
- Corrige TD 8 1920 2Document5 pagesCorrige TD 8 1920 2friends diaryPas encore d'évaluation
- Cours Lignes de Transmission Séance Adaptation D'impédance 2011 2012Document8 pagesCours Lignes de Transmission Séance Adaptation D'impédance 2011 2012benlamlihPas encore d'évaluation
- PdM3 Guide Corrige Vrac Repros C4Document2 pagesPdM3 Guide Corrige Vrac Repros C4Eva BteichPas encore d'évaluation
- Maths X PSI 1998 (Enoncé)Document7 pagesMaths X PSI 1998 (Enoncé)LM --Pas encore d'évaluation
- Transferts en PoreuxDocument644 pagesTransferts en PoreuxYacine KaPas encore d'évaluation
- CC 1 Analyse Natalia Borbón TorresDocument3 pagesCC 1 Analyse Natalia Borbón TorresNatalia Borbon TorresPas encore d'évaluation
- TF06 P09 MedianDocument4 pagesTF06 P09 MedianAyt Moha BrahimPas encore d'évaluation
- DS SDM S1 2015 CorrectionDocument2 pagesDS SDM S1 2015 CorrectiondsiscnPas encore d'évaluation
- Incendie: I-Prévention Et ProtectionDocument4 pagesIncendie: I-Prévention Et Protectionraid bazizPas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation