Vous aimerez peut-être aussi
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Instrumentation - Régulation - Automatismes Vannes de RégulationDocument28 pagesInstrumentation - Régulation - Automatismes Vannes de RégulationSouad Bouafia100% (1)
- Ferroviaires DefinitionsDocument16 pagesFerroviaires Definitionsdimachampion100% (3)
- Instrumentation - Régulation - Automatismes Vannes de Régulation PDFDocument28 pagesInstrumentation - Régulation - Automatismes Vannes de Régulation PDFSouad BouafiaPas encore d'évaluation
- EVALUATION FINALE GESTION DE PROJET - Relecture de Tentative (Page 5 Sur 10)Document5 pagesEVALUATION FINALE GESTION DE PROJET - Relecture de Tentative (Page 5 Sur 10)jocelynePas encore d'évaluation
- ThermodynamiqueDocument158 pagesThermodynamiqueAdel Toumi100% (2)
- Cours Flexion SimpleDocument23 pagesCours Flexion SimpleRose EvaPas encore d'évaluation
- JCB TelescopiqueDocument32 pagesJCB TelescopiqueFodil Zou100% (1)
- Typo Print03 ReliureDocument10 pagesTypo Print03 ReliureAbdelkrim TebibPas encore d'évaluation
- TD Transpalette CorrectionDocument3 pagesTD Transpalette Correctionkaoutartayb64Pas encore d'évaluation
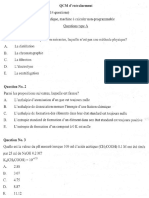
- QCM Dentrainement Chimie GeneraleDocument6 pagesQCM Dentrainement Chimie GeneraleHarakat ElhoucinePas encore d'évaluation
- Formation - ARCODEDocument43 pagesFormation - ARCODEJaouad LahdarPas encore d'évaluation
- TP1 SPE SympactDocument15 pagesTP1 SPE SympactPenda NiassPas encore d'évaluation
- CPI1-CONST-TP-DocTech DAEV 1Document9 pagesCPI1-CONST-TP-DocTech DAEV 1khalil bouadilaPas encore d'évaluation
- Savio Proxima FRDocument39 pagesSavio Proxima FRKa RimPas encore d'évaluation
- 020 - Commandes de VolDocument14 pages020 - Commandes de Voladelinho13Pas encore d'évaluation
- Géosynthetique Voie FerréeDocument38 pagesGéosynthetique Voie FerréeWajdi Ben SaidaPas encore d'évaluation
- WebGuide FR 122013Document236 pagesWebGuide FR 122013Merouane El BasriPas encore d'évaluation
- Mines Ponts MP 2009 Si EpreuveDocument35 pagesMines Ponts MP 2009 Si EpreuveIlyas MhammediPas encore d'évaluation
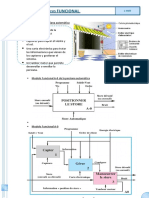
- Analyse FonctionnelleDocument7 pagesAnalyse FonctionnellemoihaPas encore d'évaluation
- Ingenierie de Cablage AxonDocument8 pagesIngenierie de Cablage AxonKlan ZangoPas encore d'évaluation
- Rapport Cm2Document10 pagesRapport Cm2FILMS AND ANIME UNIVERSEPas encore d'évaluation
- Analyse Fonctionnelle - Activité - TrottinetteDocument4 pagesAnalyse Fonctionnelle - Activité - Trottinetteayoub basslamPas encore d'évaluation
- Titan Aviation Mobile Aviation Fuel Farm FRDocument4 pagesTitan Aviation Mobile Aviation Fuel Farm FRBarbaraPas encore d'évaluation
- Analyse Fon Ction NelleDocument11 pagesAnalyse Fon Ction NelleTOPASOPas encore d'évaluation
- 6119 Enonce ScootelecDocument7 pages6119 Enonce Scooteleckamal100% (1)
- Sce GOURDACHE SAMIR PDFDocument117 pagesSce GOURDACHE SAMIR PDFAmani ChkirPas encore d'évaluation
- Central Q60aDocument16 pagesCentral Q60ajohnPas encore d'évaluation
- 8779 Sciences de Ingenieur S 2016Document23 pages8779 Sciences de Ingenieur S 2016AFADPas encore d'évaluation
- Filtre LCDocument7 pagesFiltre LCmahjoubi RabiePas encore d'évaluation
- Remote ControlDocument5 pagesRemote ControlMARIE VIANNEYPas encore d'évaluation
- Stamp 20019Document8 pagesStamp 20019Ferchichi HatemPas encore d'évaluation
- Analyse Fonctionnelle E-Traction - V1.0Document29 pagesAnalyse Fonctionnelle E-Traction - V1.0ZeNExDKKPas encore d'évaluation
- Intercut 2023v2Document4 pagesIntercut 2023v2David CerqueiraPas encore d'évaluation
- Projet CMIDocument16 pagesProjet CMIMedeho kodjo Simon henochPas encore d'évaluation
- LA TRACTION ELECTRIQUE - PPT Video Online TéléchargerDocument1 pageLA TRACTION ELECTRIQUE - PPT Video Online TéléchargerWilson nguediaPas encore d'évaluation
- SII MPSI S04 PolyTD Parametrage CorrDocument18 pagesSII MPSI S04 PolyTD Parametrage Corrjawahermohamed.maPas encore d'évaluation
- i-FOURMI, La Nano-Trancheuse Pour Pose de Fibre Optique en Milieu UrbainDocument2 pagesi-FOURMI, La Nano-Trancheuse Pour Pose de Fibre Optique en Milieu UrbaindrnanotechPas encore d'évaluation
- 11 Alstom OrnansDocument30 pages11 Alstom OrnansAlfredho ShactarPas encore d'évaluation
- 2ste - Tapis de Course Interactif - EleveDocument76 pages2ste - Tapis de Course Interactif - EleveRachid anknafPas encore d'évaluation
- Docsity Examen Sur Le Vehicule Electrique de LoisirDocument18 pagesDocsity Examen Sur Le Vehicule Electrique de LoisirRihem SouayehPas encore d'évaluation
- Vehicule AutonomeDocument16 pagesVehicule AutonomerdomrdoPas encore d'évaluation
- MC 285Document4 pagesMC 285Alex AlmeidaPas encore d'évaluation
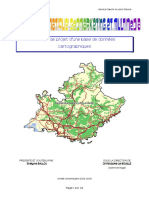
- CartoDocument32 pagesCartomerzougPas encore d'évaluation
- Remerciement: Conception D'une Antenne Patch MicrostripDocument16 pagesRemerciement: Conception D'une Antenne Patch MicrostripYossef ARPas encore d'évaluation
- Brevet Blanc Corrige GyropodeDocument5 pagesBrevet Blanc Corrige Gyropodegildas assoumou allogoPas encore d'évaluation
- CCP Tsi Si 2016eDocument30 pagesCCP Tsi Si 2016ekamalPas encore d'évaluation
- CCMP PSI 2011 DeposeDeComposite SujetDocument42 pagesCCMP PSI 2011 DeposeDeComposite SujetEssayh WadiePas encore d'évaluation
- Applications Duales Des Actionneurs Piezoelectriques AmplifiesDocument3 pagesApplications Duales Des Actionneurs Piezoelectriques AmplifiesadrarwalidPas encore d'évaluation
- Technologie Les Differents Systemes D Un Vehicule LP J.gallieni Le Freinage La Liaison Au Sol La Transmission Le Systeme Electri 3Document1 pageTechnologie Les Differents Systemes D Un Vehicule LP J.gallieni Le Freinage La Liaison Au Sol La Transmission Le Systeme Electri 3dilannesimplisPas encore d'évaluation
- Agregation Ext 2023 Sii Opt Sii Et Im Epreuve 2Document51 pagesAgregation Ext 2023 Sii Opt Sii Et Im Epreuve 2chahirkhefifi62Pas encore d'évaluation
- 8 KarosDocument13 pages8 KarosSouhail Ben AfiaPas encore d'évaluation
- Notice 0012Document30 pagesNotice 0012MhammedPas encore d'évaluation
- L'intelligence Artificielle Au Service Du Réseau Électrique: CommuniquéDocument4 pagesL'intelligence Artificielle Au Service Du Réseau Électrique: Communiquésteveaxel87Pas encore d'évaluation
- Analyse FonctionnelleDocument11 pagesAnalyse FonctionnelleHugo CedeñoPas encore d'évaluation
- Les Types de ConvoyeursDocument8 pagesLes Types de Convoyeursbarg lilPas encore d'évaluation
- 09 ExercicesDocument17 pages09 ExercicesYassine X-Man100% (1)
- XTX 145 165 185 Xtraspeed FR (F9e)Document8 pagesXTX 145 165 185 Xtraspeed FR (F9e)hysolixPas encore d'évaluation
- 8h30 Michel Charbonneau PDFDocument31 pages8h30 Michel Charbonneau PDFgggPas encore d'évaluation
- Transport FerroviaireDocument5 pagesTransport Ferroviaireouattaraihab622Pas encore d'évaluation
- Devoir de Synthèse N°01: TechnologieDocument6 pagesDevoir de Synthèse N°01: TechnologieMarouen MekkiPas encore d'évaluation
- Transmissionoptique PDFDocument53 pagesTransmissionoptique PDFAnonymous rMwYBU2Il1Pas encore d'évaluation
- Catalogue AscDocument61 pagesCatalogue AscnassimPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Etude de la technologie Smart Grid / Micro Grid au travers du Démonstrateur GEPY: (Gestion Electrique Postale Yvelines)D'EverandEtude de la technologie Smart Grid / Micro Grid au travers du Démonstrateur GEPY: (Gestion Electrique Postale Yvelines)Pas encore d'évaluation
- La petite graine d'un Grand Groupe: Le projet GEPY (Gestion Electricité Postale Yvelines)D'EverandLa petite graine d'un Grand Groupe: Le projet GEPY (Gestion Electricité Postale Yvelines)Pas encore d'évaluation
- Cmi 1 2012Document48 pagesCmi 1 2012Macrem MacremPas encore d'évaluation
- Enoncé DS2 Mars 20191 - 1Document2 pagesEnoncé DS2 Mars 20191 - 1Fatma LaribiPas encore d'évaluation
- Présentation PRIX IVOIRIEN DE LA QUALITE 2018Document4 pagesPrésentation PRIX IVOIRIEN DE LA QUALITE 2018Aboulaziz OuattaraPas encore d'évaluation
- Les Unites: Conversion en UsiDocument2 pagesLes Unites: Conversion en UsiRamziPas encore d'évaluation
- Chap 3 Stimulation Master2 Prod Profe Et AcadDocument12 pagesChap 3 Stimulation Master2 Prod Profe Et AcadAy Oub BenPas encore d'évaluation
- Détails Des Notes Chiavaroli - SimonDocument3 pagesDétails Des Notes Chiavaroli - Simonsimon chiavaroli9Pas encore d'évaluation
- TP - Les Outils D'analyse FonctionnelleDocument6 pagesTP - Les Outils D'analyse FonctionnelleGailletPas encore d'évaluation
- Ce 9 Fra 2 Sem 1718Document5 pagesCe 9 Fra 2 Sem 1718foughalichess 777Pas encore d'évaluation
- Grandeurs Molaires Partielles 2022Document50 pagesGrandeurs Molaires Partielles 2022bahawiz7890Pas encore d'évaluation
- Tool 4 Mon GPS de CarriereDocument188 pagesTool 4 Mon GPS de CarriereStanislas100% (1)
- Chapitre 1 ADDocument73 pagesChapitre 1 ADAref ChaariPas encore d'évaluation
- 2014 FrancaisDocument3 pages2014 FrancaisKatcha nanklan enock hiliPas encore d'évaluation
- TD2ROC CopieDocument27 pagesTD2ROC CopieIlyes BahfirPas encore d'évaluation
- Evaluation Des Emplois ... SupportDocument15 pagesEvaluation Des Emplois ... SupportYunessElPas encore d'évaluation
- Traitement Numerique Exercice Corrige PDFDocument31 pagesTraitement Numerique Exercice Corrige PDFسليم وداديPas encore d'évaluation
- Étude Du Son C Qu KDocument5 pagesÉtude Du Son C Qu KLaminePas encore d'évaluation
- Digicode CDVI DG502Document8 pagesDigicode CDVI DG502Aidolan UlrichPas encore d'évaluation
- SHNM FL 695-Converti CopieDocument6 pagesSHNM FL 695-Converti CopieraabePas encore d'évaluation
- 1S 02 TRIGONOMETRIE CoursDocument5 pages1S 02 TRIGONOMETRIE CoursOloufadé hafizPas encore d'évaluation
- Le Phenomene de Bleve PDFDocument2 pagesLe Phenomene de Bleve PDFMario BrosPas encore d'évaluation
- Felblinger 2016 Cours - IRM Acquisition - Imagerie ParallèleDocument79 pagesFelblinger 2016 Cours - IRM Acquisition - Imagerie Parallèleabdessamed.dj01Pas encore d'évaluation
- Le Matin - La Protection Du Consommateur Face À La Pandémie À La Lumière de La Loi 31-08Document5 pagesLe Matin - La Protection Du Consommateur Face À La Pandémie À La Lumière de La Loi 31-08KaramPas encore d'évaluation
- ALGEBRE1 Chapitre 1Document26 pagesALGEBRE1 Chapitre 1Moncif BOUDALIAPas encore d'évaluation
- Les Bases de La ChimieDocument58 pagesLes Bases de La Chimierodrigue yanPas encore d'évaluation