Vous aimerez peut-être aussi
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- 3 100%TP Copie StagiaireDocument40 pages3 100%TP Copie StagiaireOualid Ouadoudi100% (3)
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Partie3 Microcontroleur s4 E2iDocument9 pagesPartie3 Microcontroleur s4 E2iMoha BenmohaPas encore d'évaluation
- Cours Transmission Par SatelliteDocument27 pagesCours Transmission Par Satellitec68gw899fn100% (1)
- 02 Cablage Api PDFDocument29 pages02 Cablage Api PDFAdil EL AttarPas encore d'évaluation
- Sequenceur BacDocument14 pagesSequenceur BacAnderson Onésime AHOKPEPas encore d'évaluation
- SujetTP1Document10 pagesSujetTP1victorbix36Pas encore d'évaluation
- Robot Suiveur Delingne ConcepDocument18 pagesRobot Suiveur Delingne ConcepAchraf AlaouiPas encore d'évaluation
- Robot Suiveur Delingne ConcepDocument16 pagesRobot Suiveur Delingne ConcepAchraf Alaoui100% (1)
- Cours Automate Scheinder TSX2-2-2Document12 pagesCours Automate Scheinder TSX2-2-2Eliance GrahoPas encore d'évaluation
- Caracteristiques Et Pilotage Motoreducteur - EleveDocument8 pagesCaracteristiques Et Pilotage Motoreducteur - ElevePhilippe MortPas encore d'évaluation
- Formation À L'Utilisation Du Matériel Ge: Animée Par: Abidi Hatem Maitre Technologue À ISET NabeulDocument37 pagesFormation À L'Utilisation Du Matériel Ge: Animée Par: Abidi Hatem Maitre Technologue À ISET NabeulAissa IsmailPas encore d'évaluation
- IG Guide de LutilisateurDocument26 pagesIG Guide de LutilisateurSiding BarroPas encore d'évaluation
- GC600 Datasheet FR REV-1.8 PDFDocument9 pagesGC600 Datasheet FR REV-1.8 PDFChrist Rodney MAKANAPas encore d'évaluation
- GC600 Datasheet FR REV. 1.8Document9 pagesGC600 Datasheet FR REV. 1.8Dikr ElhakimPas encore d'évaluation
- TP ArduinoDocument9 pagesTP Arduinooriginyoucef17Pas encore d'évaluation
- Carte PuissanceDocument6 pagesCarte PuissanceMustaphaRamziPas encore d'évaluation
- Manuel Pata Secmaire PlacideDocument26 pagesManuel Pata Secmaire Placidebenjamin richardPas encore d'évaluation
- Chapitre 5 - Processeurs API.Document23 pagesChapitre 5 - Processeurs API.Mohammed ALMUSHIAAPas encore d'évaluation
- 1 - Les Composantes: ManipulateurDocument5 pages1 - Les Composantes: Manipulateurfatimakhadij345Pas encore d'évaluation
- SoufianeDocument15 pagesSoufianeYoussef EL KhayatyPas encore d'évaluation
- 1er Chapitre Cours PIO HGDocument21 pages1er Chapitre Cours PIO HGkhaledbenamorPas encore d'évaluation
- Cours GratuitDocument7 pagesCours GratuitMlokhiaPas encore d'évaluation
- Présentation de ProjetDocument61 pagesPrésentation de Projetslim yaichPas encore d'évaluation
- Département: Génine Electrique Filière: DUT Génie Electrique Année Universitaire:2023-2024 Semestre: (S2)Document6 pagesDépartement: Génine Electrique Filière: DUT Génie Electrique Année Universitaire:2023-2024 Semestre: (S2)nadiakolchiPas encore d'évaluation
- Brochure CAT Série Standard B CATSTA 103 FRDocument14 pagesBrochure CAT Série Standard B CATSTA 103 FRAlaa BouzaidPas encore d'évaluation
- TP Cours ArduinoDocument5 pagesTP Cours ArduinoMohamed LahninePas encore d'évaluation
- Catalogue 2016 v2Document14 pagesCatalogue 2016 v2autorreparaciones pinedoPas encore d'évaluation
- Principe de Contrôle DDocument7 pagesPrincipe de Contrôle DyasinPas encore d'évaluation
- 893 Sequence 2 Canopen LexiumDocument24 pages893 Sequence 2 Canopen LexiumLam NovoxPas encore d'évaluation
- Automate Programmable Industriel PDFDocument6 pagesAutomate Programmable Industriel PDFSD BNPas encore d'évaluation
- SCX Notice - FR - 099$1ADocument6 pagesSCX Notice - FR - 099$1Anabil160874Pas encore d'évaluation
- Api - Uf4-M2 - 01Document7 pagesApi - Uf4-M2 - 01brandon laurencePas encore d'évaluation
- 5ee4301fc18b0f105b83790f899a7437Document36 pages5ee4301fc18b0f105b83790f899a7437Usamah Mahmood KhanPas encore d'évaluation
- Ups LGR 0076 FRDocument2 pagesUps LGR 0076 FRGodfroy KOUDAKPOPas encore d'évaluation
- Pic CleanerDocument14 pagesPic Cleanercroco31Pas encore d'évaluation
- Présentation de La Plateforme NI-ELEVIS II+Document15 pagesPrésentation de La Plateforme NI-ELEVIS II+Hamza HachimPas encore d'évaluation
- GE Ammimar EnergieDocument29 pagesGE Ammimar EnergieAbo AnasPas encore d'évaluation
- Cours Les Codeurs Rotatifs Industriels PDFDocument10 pagesCours Les Codeurs Rotatifs Industriels PDFtarikmlilas100% (1)
- 11 - TP6 - Commande MCC Mpap Fpga IntéréssantDocument10 pages11 - TP6 - Commande MCC Mpap Fpga Intéréssantamani_taamallahPas encore d'évaluation
- Commande Dun Moteur Pasapas PDFDocument16 pagesCommande Dun Moteur Pasapas PDFBentchikou MohPas encore d'évaluation
- Chapitre 3Document18 pagesChapitre 3Martinien YawoloPas encore d'évaluation
- Cours Circuits IntegresDocument17 pagesCours Circuits Integresemmanuelngass350Pas encore d'évaluation
- Tp5 Asservissement Position Moteur Courant ContinuDocument5 pagesTp5 Asservissement Position Moteur Courant ContinuMc R-OnePas encore d'évaluation
- tp5 Asservissement Position Moteur Courant Continu PDFDocument5 pagestp5 Asservissement Position Moteur Courant Continu PDFMohamed Benrahal100% (1)
- CNC 3 AxdocDocument7 pagesCNC 3 AxdocNacer MezghichePas encore d'évaluation
- ch4 PDFDocument20 pagesch4 PDFYAMALEUPas encore d'évaluation
- Reialisation D Un Hacheur A Base D Un Microcontroleur PIC16F84ADocument17 pagesReialisation D Un Hacheur A Base D Un Microcontroleur PIC16F84Adudulemarc80% (5)
- Cours 03Document6 pagesCours 03Wiam KhettabPas encore d'évaluation
- RT c220 Cdi Part11Document21 pagesRT c220 Cdi Part11coyote41100% (1)
- Api Elt PDFDocument17 pagesApi Elt PDFnawzat100% (1)
- Comelit Immotec NoticeDocument4 pagesComelit Immotec NoticehughJPas encore d'évaluation
- AsservissementDocument2 pagesAsservissementSimo Bouna100% (1)
- 05 Mises A Jour Du LogicielDocument2 pages05 Mises A Jour Du LogicielPaul-Bernick Jean François (Dx.b)Pas encore d'évaluation
- ShieldCommandeMoteur v1.1Document12 pagesShieldCommandeMoteur v1.1WhatSoAverPas encore d'évaluation
- Transformate UrsDocument26 pagesTransformate UrsJustin SmithPas encore d'évaluation
- FT CVMDocument2 pagesFT CVMMohamed ElbanadiPas encore d'évaluation
- Principe de La Conversion Analogique Numérique PDFDocument40 pagesPrincipe de La Conversion Analogique Numérique PDFnardjes merzouguiPas encore d'évaluation
- Cours BTS Puissance ElectromecaDocument11 pagesCours BTS Puissance ElectromecaAmadou SARRPas encore d'évaluation
- 0-Rapport PFE deFMDocument57 pages0-Rapport PFE deFMbenbark.noureddinePas encore d'évaluation
- Cours 7 CpuDocument90 pagesCours 7 CpuSandra BouPas encore d'évaluation
- Liste Et Brochage ConnecteursDocument10 pagesListe Et Brochage Connecteursleclick42Pas encore d'évaluation
- Exposé IGBTDocument8 pagesExposé IGBTIlhem Fares100% (1)
- Série 6 Supplémentaire - EXERCICES - SUR - SYNTHESE DES FILTRES RIIDocument5 pagesSérie 6 Supplémentaire - EXERCICES - SUR - SYNTHESE DES FILTRES RIIMe Re100% (1)
- TransistorsDocument11 pagesTransistorsMohamed SeyidPas encore d'évaluation
- La DomotiqueDocument18 pagesLa Domotiquemed smiPas encore d'évaluation
- PDF PDFDocument74 pagesPDF PDFMoussa YameogoPas encore d'évaluation
- LoRa Et LoRaWan de La Théorie À La Pratique PDFDocument83 pagesLoRa Et LoRaWan de La Théorie À La Pratique PDFYynn FerdinandPas encore d'évaluation
- 1 TP Numerisation Signal Analogique-2 PDFDocument4 pages1 TP Numerisation Signal Analogique-2 PDFAnonymous jbjqt9LhtIPas encore d'évaluation
- Cours API L3Document46 pagesCours API L3Badiel MarcPas encore d'évaluation
- Chapitre 05Document40 pagesChapitre 05Sim BtbPas encore d'évaluation
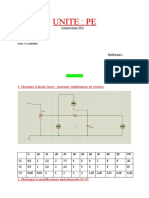
- Unite: Pe: 1. Montage À Diode Zener: Montage Stabilisateur de TensionDocument4 pagesUnite: Pe: 1. Montage À Diode Zener: Montage Stabilisateur de Tensiondouha kchPas encore d'évaluation
- TP N Matlab 2Document14 pagesTP N Matlab 2Hoùssëm DhîēbPas encore d'évaluation
- Long Term Evolution (LTE) (4G) : TitreDocument18 pagesLong Term Evolution (LTE) (4G) : TitreCoeur Verouiller0% (1)
- CHAPITRE IV Archi Syst. ProgrammésDocument40 pagesCHAPITRE IV Archi Syst. ProgrammésTimble PuteurPas encore d'évaluation
- Eaton 5SC Lineinteractive Onduleur 500-3000VA Ficheproduit FRDocument2 pagesEaton 5SC Lineinteractive Onduleur 500-3000VA Ficheproduit FRkiokiopaPas encore d'évaluation
- Variateur de Vitesse Pour Moteur MonophaséDocument9 pagesVariateur de Vitesse Pour Moteur MonophaséJIHENE GHAOUIPas encore d'évaluation
- RAM (Random Access Memory) : Les Mémoires Vives (RAM)Document8 pagesRAM (Random Access Memory) : Les Mémoires Vives (RAM)dettlaff xxxPas encore d'évaluation
- Transmission de L'informationDocument19 pagesTransmission de L'informationOthman NchifaPas encore d'évaluation
- Tutoriel HandbrakeDocument26 pagesTutoriel HandbrakeMimosa74Pas encore d'évaluation
- Moog D638 Series Digital Valves FRDocument0 pageMoog D638 Series Digital Valves FRnabil160874Pas encore d'évaluation
- VX400s LED Display Controller User ManualDocument33 pagesVX400s LED Display Controller User Manualroland “RolanDelmas” delmasPas encore d'évaluation
- Chapitre 5 L'amplificateur Opérationnel Et Ses Applications PratiquesDocument1 pageChapitre 5 L'amplificateur Opérationnel Et Ses Applications PratiquesBushraPas encore d'évaluation
- UFS Manuel en FrançaisDocument33 pagesUFS Manuel en FrançaisMohan RajPas encore d'évaluation