Vous aimerez peut-être aussi
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- CM1 L9 Ranger Des Fractions Simples 2020Document3 pagesCM1 L9 Ranger Des Fractions Simples 2020koss koss100% (1)
- Referentiel RSE en LogistiqueDocument228 pagesReferentiel RSE en LogistiqueMarshall WilliamsPas encore d'évaluation
- Grimoire Magie Terre BLANCDocument38 pagesGrimoire Magie Terre BLANCflorent34150100% (2)
- Cours Phonolgie 2LMD - 3Document15 pagesCours Phonolgie 2LMD - 3Ouassila DjekidaPas encore d'évaluation
- 5 - Criteres de Limite D'elasticiteDocument7 pages5 - Criteres de Limite D'elasticiteabdo tm100% (1)
- Slides Cours Dy Nami Que Chap 5Document35 pagesSlides Cours Dy Nami Que Chap 5Lâm Quốc Minh100% (1)
- HTTP WWW - Electrostimulateurs-Manuels - FR Fichiers Manuels Globus Elite-S2 Elite-S2-Genesy-S2-Duo-TensDocument40 pagesHTTP WWW - Electrostimulateurs-Manuels - FR Fichiers Manuels Globus Elite-S2 Elite-S2-Genesy-S2-Duo-TensMEDARBEL AbdelkrimPas encore d'évaluation
- Comment La Sociologie Explique-T-Elle Les Comportements Criminels?Document2 pagesComment La Sociologie Explique-T-Elle Les Comportements Criminels?Nicolas Nolivos100% (1)
- Exercice Ch5 9Document3 pagesExercice Ch5 9أسامة مكريمPas encore d'évaluation
- Chap 5 Cours - 2ddl - LibresDocument13 pagesChap 5 Cours - 2ddl - LibresaaaboudaPas encore d'évaluation
- Devoir Mec-Elect - SolutionDocument3 pagesDevoir Mec-Elect - SolutionmissmaymounaPas encore d'évaluation
- Exercice Ch1 3Document2 pagesExercice Ch1 3Abdelatif KarbiPas encore d'évaluation
- Chap 4 Cours - 1ddl - ForcéesDocument28 pagesChap 4 Cours - 1ddl - ForcéesaaaboudaPas encore d'évaluation
- 07 Mecanique Dynamique Point Referentiel Galileen Exercices ReponsesDocument2 pages07 Mecanique Dynamique Point Referentiel Galileen Exercices ReponsesYOUNES ELASRIPas encore d'évaluation
- Chap 3 Cours - 1ddl - Libres - AmortiesDocument15 pagesChap 3 Cours - 1ddl - Libres - AmortiesaaaboudaPas encore d'évaluation
- Slides CM NDDL New PDFDocument31 pagesSlides CM NDDL New PDFaminePas encore d'évaluation
- TD CourbesDocument1 pageTD CourbesTahirou FanePas encore d'évaluation
- TD1 Analyse 2-1Document5 pagesTD1 Analyse 2-1Ange Madou100% (1)
- TD4 BrownDocument2 pagesTD4 Brownagabsi.workPas encore d'évaluation
- 20 IntegrationDocument1 page20 IntegrationHome High-TechPas encore d'évaluation
- TD2 PrimitivesDocument2 pagesTD2 PrimitivesAli kanaanPas encore d'évaluation
- Résonance Des Plasmons de SurfaceDocument7 pagesRésonance Des Plasmons de Surfaceemilien.martel.33Pas encore d'évaluation
- CorrectionTD1 (1)Document4 pagesCorrectionTD1 (1)elios.goujotPas encore d'évaluation
- 2M261 DM1Document9 pages2M261 DM1Famatch RachidPas encore d'évaluation
- Sujet MathèmatiqueDocument3 pagesSujet MathèmatiqueIbrahel AlexeyPas encore d'évaluation
- AN1NI2 td2Document2 pagesAN1NI2 td2Michel AchkarPas encore d'évaluation
- Exercices Pour Les RévisionsDocument4 pagesExercices Pour Les RévisionssjaubertPas encore d'évaluation
- Projet 2021 22 V4Document3 pagesProjet 2021 22 V4Wenting MAPas encore d'évaluation
- CorrigéSérie TD5 Phys 3Document3 pagesCorrigéSérie TD5 Phys 3Suzuki GSXRPas encore d'évaluation
- Exercice ch5 2Document2 pagesExercice ch5 2أسامة مكريمPas encore d'évaluation
- Calcul IntegralDocument2 pagesCalcul IntegraltorkitaherPas encore d'évaluation
- section 01Document2 pagessection 01armandgahounga312Pas encore d'évaluation
- COURSDYNAMIQUEDESSTRUCTURESLConstruction Mécanique 022Document45 pagesCOURSDYNAMIQUEDESSTRUCTURESLConstruction Mécanique 022Youcef RaisPas encore d'évaluation
- Chap 3Document16 pagesChap 3Abdel bakiPas encore d'évaluation
- TD2_IES_23-24Document1 pageTD2_IES_23-24maxogb24Pas encore d'évaluation
- BODEDocument7 pagesBODEAhmed AhmedPas encore d'évaluation
- Série 3 2021Document5 pagesSérie 3 2021Rafael EscobarPas encore d'évaluation
- Devoir Surveillé 1 18 19 OndesvibrationDocument6 pagesDevoir Surveillé 1 18 19 Ondesvibrationsihamarbaz14Pas encore d'évaluation
- td3_thermodynamiqueDocument4 pagestd3_thermodynamiquesayore.comitels12Pas encore d'évaluation
- TD 1 S3Document5 pagesTD 1 S3somaben26Pas encore d'évaluation
- CorrigeDocument1 pageCorrigeNa JouaPas encore d'évaluation
- Integrale Dependant de Deux ParametresDocument11 pagesIntegrale Dependant de Deux ParametresAnass BoukhemsPas encore d'évaluation
- Système À Plusieurs DDLDDocument35 pagesSystème À Plusieurs DDLDPape LeyePas encore d'évaluation
- DDS Cours 12Document44 pagesDDS Cours 12Tamba WafaaPas encore d'évaluation
- Cours 1ddl Libres Non AmortiesDocument6 pagesCours 1ddl Libres Non AmortiesRedouane RedaPas encore d'évaluation
- Cours RDM2 3Document23 pagesCours RDM2 3Chaimaa EnnouhiPas encore d'évaluation
- DM1 CorrectionDocument3 pagesDM1 CorrectionRim BenaliPas encore d'évaluation
- CC 0 A 96087 Ab 4 Be 1 DCDDocument13 pagesCC 0 A 96087 Ab 4 Be 1 DCDChaouki SaidiPas encore d'évaluation
- serie 3Document3 pagesserie 3Ilyasse RahalPas encore d'évaluation
- Test Vibrations 2022 CorrigDocument3 pagesTest Vibrations 2022 CorrigAbderrahmane AEPas encore d'évaluation
- ds4 Ipest22 23 CorrigeDocument8 pagesds4 Ipest22 23 CorrigeYoussef MzabiPas encore d'évaluation
- NYA FormulesDocument2 pagesNYA FormulesKaeMPas encore d'évaluation
- TD Integrale Generalisee MP 2123Document2 pagesTD Integrale Generalisee MP 2123mehdi benmassoudPas encore d'évaluation
- Feuille2 (2007)Document4 pagesFeuille2 (2007)Jack MakaomPas encore d'évaluation
- DEMONSTRA TION La-Mecanique-RelativisteDocument12 pagesDEMONSTRA TION La-Mecanique-RelativistesumaleePas encore d'évaluation
- Cours 1Document13 pagesCours 1Malo TheasPas encore d'évaluation
- TD Math 03 Nemuro 1Document2 pagesTD Math 03 Nemuro 1mehmet bougoutaiaPas encore d'évaluation
- Cours4 ElectroniqueI 0506Document7 pagesCours4 ElectroniqueI 0506HALAILIPas encore d'évaluation
- UntitledDocument9 pagesUntitledStanislas MoupefoPas encore d'évaluation
- Fic 00139Document12 pagesFic 00139MolayHmadBlmPas encore d'évaluation
- Entrain Ement 8Document2 pagesEntrain Ement 8Soufiane MoustakbalPas encore d'évaluation
- Formulaire Dynamique de StructuresDocument7 pagesFormulaire Dynamique de Structuresksecas_1Pas encore d'évaluation
- BL 1Document22 pagesBL 1Enidroun OutPas encore d'évaluation
- Chapitre2 Système À Un DDL - 2020-2021Document24 pagesChapitre2 Système À Un DDL - 2020-2021Farouk BoughazalaPas encore d'évaluation
- Exercice Ch5 3Document2 pagesExercice Ch5 3أسامة مكريمPas encore d'évaluation
- Exercice 4Document4 pagesExercice 4أسامة مكريمPas encore d'évaluation
- 3 DeformationsDocument30 pages3 DeformationsMahmoud MoncefPas encore d'évaluation
- 5-Methodes de ResolutionDocument17 pages5-Methodes de ResolutionMahmoud MoncefPas encore d'évaluation
- (6-LOI-COMPORTEMENT (Mode de Compatibilité) ) PDFDocument9 pages(6-LOI-COMPORTEMENT (Mode de Compatibilité) ) PDFSoufiane ElPas encore d'évaluation
- CF Élasticité EXAMDocument1 pageCF Élasticité EXAMأسامة مكريمPas encore d'évaluation
- 7 Elasticite PlaneDocument12 pages7 Elasticite PlaneMahmoud MoncefPas encore d'évaluation
- Devoir MPS 2022Document2 pagesDevoir MPS 2022أسامة مكريمPas encore d'évaluation
- Méthode de Résolution de Problèmes Et Outils AssociésDocument17 pagesMéthode de Résolution de Problèmes Et Outils AssociésbinlinPas encore d'évaluation
- Kitchen Xtone 2023Document89 pagesKitchen Xtone 2023Murat KanberoğluPas encore d'évaluation
- Compte Rendu FonderieDocument9 pagesCompte Rendu FonderiedmedmahdiPas encore d'évaluation
- 1 - Contrôle Et ManagementDocument23 pages1 - Contrôle Et ManagementlolaPas encore d'évaluation
- Formations Qshe PDFDocument4 pagesFormations Qshe PDFfieti zlatanPas encore d'évaluation
- Epistémologie Des Sciences HumainesDocument2 pagesEpistémologie Des Sciences HumainesmeldimanchePas encore d'évaluation
- Vibration SystemsDocument24 pagesVibration SystemsaliPas encore d'évaluation
- Ia 09 AnnDocument17 pagesIa 09 AnnSarra HamzaPas encore d'évaluation
- Activite 2 5e Semaine 1Document2 pagesActivite 2 5e Semaine 1Aboubacar KountaPas encore d'évaluation
- Projet de Thèse - Mamadou COULIBALYDocument5 pagesProjet de Thèse - Mamadou COULIBALYMamadou CoulibalyPas encore d'évaluation
- Cours 2 Capteurs MEMSDocument9 pagesCours 2 Capteurs MEMSTurbo NSXPas encore d'évaluation
- Mhe Strategie de Developpement Rural 2003Document66 pagesMhe Strategie de Developpement Rural 2003OUSMANPas encore d'évaluation
- Chap 2 Les-Climats-Et-Courants-A-La-Surface-De-La-TerreDocument16 pagesChap 2 Les-Climats-Et-Courants-A-La-Surface-De-La-Terreyanina.kolodyazhnayaPas encore d'évaluation
- Convection Forcee Dans Des Surfaces PlanDocument8 pagesConvection Forcee Dans Des Surfaces Planim enePas encore d'évaluation
- Devoir de Synthèse N°2 - Sciences Physiques - 1ère AS (2013-2014) MR Alibi AnouarDocument3 pagesDevoir de Synthèse N°2 - Sciences Physiques - 1ère AS (2013-2014) MR Alibi AnouarimedPas encore d'évaluation
- Document - Unique - Evaluation - Risques - Professionnels ZMDocument11 pagesDocument - Unique - Evaluation - Risques - Professionnels ZMMariano OKEPas encore d'évaluation
- 09 Cours Statistiques Pourcentages ProbabiliteDocument19 pages09 Cours Statistiques Pourcentages ProbabiliteOtmane LhmPas encore d'évaluation
- Factures Etudes 2014Document14 pagesFactures Etudes 2014Achour SiderPas encore d'évaluation
- Cours de MR Cailler Épistémologie de La Communication Des OrganisationsDocument30 pagesCours de MR Cailler Épistémologie de La Communication Des OrganisationsNicolasAPas encore d'évaluation
- AP FonctionsDocument2 pagesAP FonctionsMarlèneAndrieuPas encore d'évaluation
- Compact NSX PDFDocument50 pagesCompact NSX PDFMouna BoujelbenPas encore d'évaluation
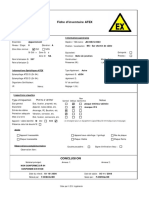
- Fiche D'inventaire ATEX: Informations Générales Appontement EnvironnementDocument2 pagesFiche D'inventaire ATEX: Informations Générales Appontement EnvironnementMohammed DjelailiPas encore d'évaluation
- Transfert de Chaleur Par Rayonnement1 PDFDocument31 pagesTransfert de Chaleur Par Rayonnement1 PDFDemba SyllaPas encore d'évaluation
- Les Éléments Chimiques Dans L'univers - 1ère - Cours Enseignement Scientifique - KartableDocument2 pagesLes Éléments Chimiques Dans L'univers - 1ère - Cours Enseignement Scientifique - KartableHello HelloPas encore d'évaluation