Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Expose RDocument22 pagesExpose Rkaris kamPas encore d'évaluation
- 3.theoreme de L'energie CinetiqueDocument15 pages3.theoreme de L'energie Cinetiquemaster F100% (1)
- PCM FS09 EnergieDocument3 pagesPCM FS09 EnergiemohamedPas encore d'évaluation
- Résume Chapitre 4 Travail Et Énergie Physique1Document3 pagesRésume Chapitre 4 Travail Et Énergie Physique1big bossPas encore d'évaluation
- PCM FS8 EnergieDocument3 pagesPCM FS8 EnergieAmina DinariPas encore d'évaluation
- Chapitre 3 Travail Et EnergieDocument8 pagesChapitre 3 Travail Et EnergieKawter HamzaouiPas encore d'évaluation
- energieDocument4 pagesenergiedrakentchicayaPas encore d'évaluation
- Chap2 F E T CoursDocument11 pagesChap2 F E T CoursDjambou vaslande descieuxPas encore d'évaluation
- PROG+chap1 Master1 2014Document22 pagesPROG+chap1 Master1 2014Hawa TembelyPas encore d'évaluation
- Cours PDFDocument24 pagesCours PDFRa OufPas encore d'évaluation
- Chapitre 3 Travail Et EnergieDocument24 pagesChapitre 3 Travail Et Energiesambe.elPas encore d'évaluation
- MécaniqueDocument8 pagesMécaniqueArnaud MolehantPas encore d'évaluation
- Chap TciDocument5 pagesChap TciSidibéPas encore d'évaluation
- Cours Modelisation AM Chap1 ProfDocument4 pagesCours Modelisation AM Chap1 ProfBouba RabebPas encore d'évaluation
- Chapitre 3-Théorèmes Généraux Des Systèmes ÉlastiquesDocument15 pagesChapitre 3-Théorèmes Généraux Des Systèmes ÉlastiquesAnis LatrechePas encore d'évaluation
- Chapiii Phy1Document5 pagesChapiii Phy1Abani AbdoullayePas encore d'évaluation
- PCMterm FS11 EnergieMecaniqueDocument5 pagesPCMterm FS11 EnergieMecaniquefekayvePas encore d'évaluation
- Lagrange Cours PDFDocument6 pagesLagrange Cours PDFAlinour ViPas encore d'évaluation
- Lecon 2la Transformation de LDocument6 pagesLecon 2la Transformation de LJe suis Je suisPas encore d'évaluation
- Statique Forces Et MomentsDocument10 pagesStatique Forces Et MomentsPaul EssongPas encore d'évaluation
- Mécanique - Physique L1Document21 pagesMécanique - Physique L1Yohann CaillardPas encore d'évaluation
- Cours Mecanique DynamiqueDocument33 pagesCours Mecanique DynamiqueAmina BELABIDPas encore d'évaluation
- 04AC31 - L' Énergie Mécanique - ProfDocument3 pages04AC31 - L' Énergie Mécanique - ProfMister PandaPas encore d'évaluation
- Chapitre 1Document22 pagesChapitre 1ISLI et TISLITPas encore d'évaluation
- Correction Examen Regional Rabat Sale Kenitra 2018 1Document4 pagesCorrection Examen Regional Rabat Sale Kenitra 2018 1abdelhadi50% (2)
- 00 COURS ETT DM PDFDocument13 pages00 COURS ETT DM PDFHatim AnasPas encore d'évaluation
- Série N°3 de Physique II SVII 2017 2018 FacultatifDocument8 pagesSérie N°3 de Physique II SVII 2017 2018 Facultatifbenkhaleqmaroua1Pas encore d'évaluation
- Série 4 F 2020-2021 Correction Ex 1 Et Ex 2 - SignedDocument5 pagesSérie 4 F 2020-2021 Correction Ex 1 Et Ex 2 - SignedBrahim YEKHLEFPas encore d'évaluation
- 3 Energie Mecanique - Cours PDFDocument42 pages3 Energie Mecanique - Cours PDFWenceslas Dima0% (1)
- Rappel de Mecaniqueing160Document6 pagesRappel de Mecaniqueing160Ahmed ZidanePas encore d'évaluation
- Série phy rotationDocument2 pagesSérie phy rotationkhadija20kha280Pas encore d'évaluation
- Chap. 1 Théorèmes ÉnergétiquesDocument44 pagesChap. 1 Théorèmes ÉnergétiquesWambié NagaroPas encore d'évaluation
- Chapitre 13Document27 pagesChapitre 13Bessem BhiriPas encore d'évaluation
- Bases de La Dynamique CoursDocument4 pagesBases de La Dynamique CoursIsma ZerboPas encore d'évaluation
- Formalisme de LagrangeDocument20 pagesFormalisme de LagrangeKamel AbboudiPas encore d'évaluation
- Cours Travail Energie FinalDocument8 pagesCours Travail Energie FinalMohamed TznPas encore d'évaluation
- Cours Et Exo de RDMDocument65 pagesCours Et Exo de RDMyao ghislain kouadio100% (3)
- Leçon 1: Travail Et Puissanve D'Une Force Constante: Situation de VieDocument6 pagesLeçon 1: Travail Et Puissanve D'Une Force Constante: Situation de VieAbrahamPas encore d'évaluation
- CHAP 8 Travail Des Forces Et ÉnergieDocument4 pagesCHAP 8 Travail Des Forces Et Énergiehepived840Pas encore d'évaluation
- Meca THM4 HandoutDocument45 pagesMeca THM4 HandoutLeo MartinezPas encore d'évaluation
- ElectrocinétiqueDocument26 pagesElectrocinétiquekhediri hibaPas encore d'évaluation
- TD2 DUT1 - MécaDocument3 pagesTD2 DUT1 - Mécasambatall85Pas encore d'évaluation
- Chap 6. Puissance, Inertie Et Couples EquivalentsDocument8 pagesChap 6. Puissance, Inertie Et Couples EquivalentsCheikh Abdoul Hakim BABOUPas encore d'évaluation
- Corrige TP Loi de NewtonDocument3 pagesCorrige TP Loi de NewtonMaryam YammPas encore d'évaluation
- Corr PC Laayoune Sakia Hamraa 2019 FR (WWW - Pc1.ma)Document3 pagesCorr PC Laayoune Sakia Hamraa 2019 FR (WWW - Pc1.ma)Cours français facilePas encore d'évaluation
- Physique D Chap9 Mecanique de NewtonDocument4 pagesPhysique D Chap9 Mecanique de NewtonjufremPas encore d'évaluation
- Jean-Pierre Caron, Jean-Paul Hautier-Modélisation Et Commande de La Machine Asynchrone-Technip (1995)Document9 pagesJean-Pierre Caron, Jean-Paul Hautier-Modélisation Et Commande de La Machine Asynchrone-Technip (1995)Yann ElhamPas encore d'évaluation
- EnergiecinetiqueDocument24 pagesEnergiecinetiqueAmoula HayatiePas encore d'évaluation
- Chapitre12 Travail Energie CinetiqueDocument6 pagesChapitre12 Travail Energie Cinetiqueakissi konan paulinePas encore d'évaluation
- Polycopié TP Méca Solide CLE - PC&Maths S3Document16 pagesPolycopié TP Méca Solide CLE - PC&Maths S3jlidsoufiane17Pas encore d'évaluation
- 3-Dynamique Du Point PDFDocument6 pages3-Dynamique Du Point PDFali akredPas encore d'évaluation
- Chapitre 3 Dynamique Du Point MPCI-2023Document6 pagesChapitre 3 Dynamique Du Point MPCI-2023Mohamed KonatePas encore d'évaluation
- PC 3ème - L4 - Travail Et Puissance mecanique-NEWDocument6 pagesPC 3ème - L4 - Travail Et Puissance mecanique-NEWGedion DouaPas encore d'évaluation
- Chapitre 2Document52 pagesChapitre 2Yassin ZeghabiPas encore d'évaluation
- 1spé Chapitre 15 - Aspects Énergétiques en Mécanique EleveDocument3 pages1spé Chapitre 15 - Aspects Énergétiques en Mécanique EleveHady SANOGOPas encore d'évaluation
- Examen Normal Mécanique Du Point SMPC 2018 2019correctionDocument7 pagesExamen Normal Mécanique Du Point SMPC 2018 2019correctionRachif MesrarPas encore d'évaluation
- Mecanique ClassiqueDocument7 pagesMecanique ClassiqueMEHDID100% (1)
- Formulaire de Candidature Simplifié INVEST RH - YOUNES BOUAYADDocument2 pagesFormulaire de Candidature Simplifié INVEST RH - YOUNES BOUAYADybouayadPas encore d'évaluation
- Programme Général Et CAODocument12 pagesProgramme Général Et CAOHOUDAPas encore d'évaluation
- Livre ES TS 2020 PDFDocument8 pagesLivre ES TS 2020 PDFYoussef KhalfaPas encore d'évaluation
- RappelHTML WebSémantiqueDocument2 pagesRappelHTML WebSémantiqueNour LetaiefPas encore d'évaluation
- Nibridge: Unibridge®: Construire Et ReconstruireDocument2 pagesNibridge: Unibridge®: Construire Et ReconstruireorbediePas encore d'évaluation
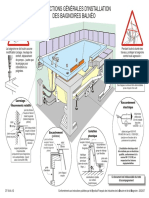
- BalneoDocument2 pagesBalneocloud adsophPas encore d'évaluation
- Revues de DirectionDocument39 pagesRevues de DirectionTim Stelens Seka100% (1)
- RestoDocument2 pagesRestoAbir LatréchePas encore d'évaluation
- 6a - Tce GraveDocument49 pages6a - Tce GraveErick AndersonPas encore d'évaluation
- Explication - Louise Labé, Sonnet 8Document2 pagesExplication - Louise Labé, Sonnet 8lyblanc100% (3)
- Inhibiteurs de Pompe À ProtonsDocument1 pageInhibiteurs de Pompe À ProtonsYasmine TarchounPas encore d'évaluation
- Émancipation TardiveDocument2 pagesÉmancipation TardiveFrancisco Buendía Del MolinoPas encore d'évaluation
- Rapport de StageDocument7 pagesRapport de StagebenbadaPas encore d'évaluation
- Perceval Adoubement Valeurs de La Chevalerie 2Document2 pagesPerceval Adoubement Valeurs de La Chevalerie 2JIMENA ABELLO GOMEZPas encore d'évaluation
- Devoir de Synthèse N°1 2017 2018 (Hidri Lazhar) PDFDocument3 pagesDevoir de Synthèse N°1 2017 2018 (Hidri Lazhar) PDFRabiaa GuesmiPas encore d'évaluation
- 6 7091 E79da38f PDFDocument24 pages6 7091 E79da38f PDFSAEC LIBERTEPas encore d'évaluation
- ParnassaDocument62 pagesParnassaAli TraorePas encore d'évaluation
- SYLLABUS TIME MANAGEMENT Gestion Du Temps Et Des PrioritésDocument2 pagesSYLLABUS TIME MANAGEMENT Gestion Du Temps Et Des PrioritésMamadou GueyePas encore d'évaluation
- Asymétrie D'informationsDocument6 pagesAsymétrie D'informationsDjoufack JanvierPas encore d'évaluation
- Ecosystèmes D'affaires & de Connaissances - Une Lecture Suivant Les Analogies Du Jeu de GoDocument94 pagesEcosystèmes D'affaires & de Connaissances - Une Lecture Suivant Les Analogies Du Jeu de GoammoniosPas encore d'évaluation
- Acfrogdtvvmhsyokaxk9q9ktmv8ergolx3 8r7mirpt6v0g8ws9791lwm0erykcgoe - Oxnasmm7zamygytzylwahyey2bio4ju6kha9f O-Mtovs31mlbtazlp83rq6izewdexdeitn7oqdxmsdDocument2 pagesAcfrogdtvvmhsyokaxk9q9ktmv8ergolx3 8r7mirpt6v0g8ws9791lwm0erykcgoe - Oxnasmm7zamygytzylwahyey2bio4ju6kha9f O-Mtovs31mlbtazlp83rq6izewdexdeitn7oqdxmsdEL MéhdiPas encore d'évaluation
- Motrec WebManual - E 280B AC - 1131229upDocument61 pagesMotrec WebManual - E 280B AC - 1131229uppedro javier carrera juradoPas encore d'évaluation
- Cours Techniques ComDocument81 pagesCours Techniques Comkhalid hammaniPas encore d'évaluation
- (LA) 2 Racine, Phèdre I3 (Aveu)Document6 pages(LA) 2 Racine, Phèdre I3 (Aveu)koana bshsPas encore d'évaluation
- Balistique - SniperSoricomDocument30 pagesBalistique - SniperSoricomKishore BarreteauPas encore d'évaluation
- Chrétiens D'iranDocument18 pagesChrétiens D'iranSepide HakhamaneshiPas encore d'évaluation
- Le Monde - 11/12/2008Document30 pagesLe Monde - 11/12/2008Kevin35100% (8)
- FéminismeDocument5 pagesFéminismeSouleymane TRAOREPas encore d'évaluation
- Recits D'un Pèlerin RusseDocument160 pagesRecits D'un Pèlerin RusseGuillaume Morgenstern100% (5)
- Filières Ouvertes À l'UAE en 2021-2022-1Document9 pagesFilières Ouvertes À l'UAE en 2021-2022-1james dorPas encore d'évaluation