Vous aimerez peut-être aussi
- Machines de Jeux: Architecture des Consoles de Jeux VidéoD'EverandMachines de Jeux: Architecture des Consoles de Jeux VidéoÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- CHAPITRE IV Archi Syst. ProgrammésDocument40 pagesCHAPITRE IV Archi Syst. ProgrammésTimble PuteurPas encore d'évaluation
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
- CHAPITRE IV Archi Syst. Programmés PDFDocument40 pagesCHAPITRE IV Archi Syst. Programmés PDFTimble PuteurPas encore d'évaluation
- Systemes Microcontroleurs Chap.1 Chap.2Document15 pagesSystemes Microcontroleurs Chap.1 Chap.2MENANI ZineddinePas encore d'évaluation
- Cours Microprocesseur Et MicrocontroleursimplDocument171 pagesCours Microprocesseur Et MicrocontroleursimplAbdou Super100% (1)
- Cours Microcontrôleur Microprocesseur 66 PDFDocument28 pagesCours Microcontrôleur Microprocesseur 66 PDFAbderrahim RiadPas encore d'évaluation
- Chapitre 3 DSP 2020-2021Document33 pagesChapitre 3 DSP 2020-2021M'hamed Saadi BachirPas encore d'évaluation
- Moto 6809Document46 pagesMoto 6809Kawtar FelkiPas encore d'évaluation
- Du Microprocesseur À La Carte de Prototypage Partie 1: Microprocesseur Et MicrocontrôleurDocument4 pagesDu Microprocesseur À La Carte de Prototypage Partie 1: Microprocesseur Et MicrocontrôleurBsusnksPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 51Document18 pagesCours Microcontrôleur Microprocesseur 51NasriMohsenPas encore d'évaluation
- AutomateDocument30 pagesAutomatealainPas encore d'évaluation
- Structure Systeme MicropDocument6 pagesStructure Systeme MicropLahoussine ElmahniPas encore d'évaluation
- TP Info IndusDocument26 pagesTP Info IndusAmine MassawiPas encore d'évaluation
- chapitre1_licence MicroprocesseurDocument19 pageschapitre1_licence MicroprocesseurAbdallah RehabPas encore d'évaluation
- 01 Microcontroleur Kes Msp430g2553Document2 pages01 Microcontroleur Kes Msp430g2553Denis OLIVE100% (1)
- ChapitreI Cours2 InformatiqueDocument81 pagesChapitreI Cours2 InformatiqueCHAABIPas encore d'évaluation
- Chapitre 1Document16 pagesChapitre 1YOUCEF BOUHARAOUAPas encore d'évaluation
- TP 1 Info Indus07Document15 pagesTP 1 Info Indus07MOHAMED TAMZAITIPas encore d'évaluation
- Informatique de Base 2Document21 pagesInformatique de Base 2ENCGC_COMPUTINGPas encore d'évaluation
- Chapitre I Introduction Et RappelsDocument14 pagesChapitre I Introduction Et RappelsSanae BOUNOUAPas encore d'évaluation
- Les Automates Programmables IndustrielsDocument22 pagesLes Automates Programmables IndustrielsImene HarbaouiPas encore d'évaluation
- Chapitre1 Architecture - Ordinateurs - 2019 - 2020Document13 pagesChapitre1 Architecture - Ordinateurs - 2019 - 2020Bessem BessemPas encore d'évaluation
- Presentation 11Document59 pagesPresentation 11Oussama DaliPas encore d'évaluation
- Architecture Des OrdinateursDocument51 pagesArchitecture Des Ordinateursbew niiPas encore d'évaluation
- Exposé Le MicroprocesseurDocument8 pagesExposé Le MicroprocesseurMamadou Seydou Diallo67% (6)
- Chapitre 1 - Généralités Sur Les Systèmes A Microprocesseur (2017-2018)Document7 pagesChapitre 1 - Généralités Sur Les Systèmes A Microprocesseur (2017-2018)Ali OuattaraPas encore d'évaluation
- Traitement de L'information PDFDocument6 pagesTraitement de L'information PDFFarid AfifiPas encore d'évaluation
- Architecture Des OrdinateursDocument17 pagesArchitecture Des Ordinateursdhia.trimech.123Pas encore d'évaluation
- Chapitre4 Architecture TMS320c6713DSKDocument7 pagesChapitre4 Architecture TMS320c6713DSKBennis MeryemPas encore d'évaluation
- C Avancé 2022Document178 pagesC Avancé 2022Hamza El mamounPas encore d'évaluation
- Chap 2Document5 pagesChap 2christimimbangPas encore d'évaluation
- Cours 3A DEE MicroControleur PDFDocument21 pagesCours 3A DEE MicroControleur PDFDiavolo Rossonero del Milan100% (1)
- Cours-mcAVRN (Mode de Compatibilité)Document181 pagesCours-mcAVRN (Mode de Compatibilité)larbi33% (3)
- Architecture D'un Système À Base de MicroprocesseurDocument14 pagesArchitecture D'un Système À Base de Microprocesseurinconito111Pas encore d'évaluation
- Introduction MicrocontroleurDocument8 pagesIntroduction Microcontroleurhouda bouzekriPas encore d'évaluation
- Les Automates Programmables Industriels (API) - l3 - MT - 2021Document26 pagesLes Automates Programmables Industriels (API) - l3 - MT - 2021manaiadem0Pas encore d'évaluation
- Cours UpDocument9 pagesCours Upram frPas encore d'évaluation
- Cours Von NeumannDocument7 pagesCours Von NeumannEriotsuPas encore d'évaluation
- Chapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Document29 pagesChapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Karym ElhoussinePas encore d'évaluation
- Chapitre 1: Introduction Aux MicroprocesseursDocument26 pagesChapitre 1: Introduction Aux MicroprocesseursAbir HammamiPas encore d'évaluation
- COURS Systemes Embarques PDFDocument33 pagesCOURS Systemes Embarques PDFseye abdou azizPas encore d'évaluation
- Mini-Projet Microprocesseur KIT MC09Document19 pagesMini-Projet Microprocesseur KIT MC09hamza booba100% (2)
- Cours Microcontrôleur Microprocesseur 32Document37 pagesCours Microcontrôleur Microprocesseur 32Frank EffeuzePas encore d'évaluation
- Slide Atmega16bisDocument36 pagesSlide Atmega16bisNadhir BndPas encore d'évaluation
- Chapitre 5 LE TMS320C6701 DSP PDFDocument9 pagesChapitre 5 LE TMS320C6701 DSP PDFSmart ClassePas encore d'évaluation
- Architecture Des OrdinateursDocument17 pagesArchitecture Des OrdinateursMohsen GharbiPas encore d'évaluation
- Archi Chapitre1Document32 pagesArchi Chapitre1dawdbedjloudPas encore d'évaluation
- Cours Micro Controleur Architecture STSDocument7 pagesCours Micro Controleur Architecture STSMAHAMADOU TOUNGARAPas encore d'évaluation
- premiere partieDocument153 pagespremiere partieAbdel Karim Pagna FoikwetPas encore d'évaluation
- Chapitre 1Document45 pagesChapitre 1moumnimeryem2002Pas encore d'évaluation
- Automates Programmables Industriels (API)Document1 pageAutomates Programmables Industriels (API)Bonheur KambaPas encore d'évaluation
- Ado Proc 16Document20 pagesAdo Proc 16Layeurs MiazusPas encore d'évaluation
- µP et µC chapitre 1Document47 pagesµP et µC chapitre 1oumayma2010Pas encore d'évaluation
- Partie1 Introduction Cours PDocument15 pagesPartie1 Introduction Cours PKhadija HtPas encore d'évaluation
- Les Pic 16F877Document14 pagesLes Pic 16F877Haythem FerjaniPas encore d'évaluation
- Module MicrocontroleursDocument106 pagesModule MicrocontroleursMOHAMED AMINE EL GUENPas encore d'évaluation
- Ec Gim334 - Dao - CaoDocument47 pagesEc Gim334 - Dao - CaoArmand EssPas encore d'évaluation
- Microsoft PowerPoint - Cours de PIC GénéralitésDocument17 pagesMicrosoft PowerPoint - Cours de PIC GénéralitésNor AlhoudaPas encore d'évaluation
- Examen Signaux NumériqueDocument5 pagesExamen Signaux Numériquefazfrito lacaviataPas encore d'évaluation
- CM5 - Rupture de SéquencesDocument37 pagesCM5 - Rupture de Séquencesfazfrito lacaviataPas encore d'évaluation
- CM4 - OperatArithmDocument26 pagesCM4 - OperatArithmfazfrito lacaviataPas encore d'évaluation
- CM8 CanDocument27 pagesCM8 Canfazfrito lacaviataPas encore d'évaluation
- Examen de Schémas Et Appareillage CorrigéDocument2 pagesExamen de Schémas Et Appareillage Corrigéfazfrito lacaviataPas encore d'évaluation
- Corrigé TD Analyse2 MI Equat Diff 19 20Document15 pagesCorrigé TD Analyse2 MI Equat Diff 19 20Hind ChadliPas encore d'évaluation
- Examen Signaux NumériqueDocument5 pagesExamen Signaux Numériquefazfrito lacaviataPas encore d'évaluation
- TD 2-1Document1 pageTD 2-1Khaled BenyoucefPas encore d'évaluation
- SN 2017-10 Partiel CorrigéDocument4 pagesSN 2017-10 Partiel Corrigéfazfrito lacaviataPas encore d'évaluation
- Présentation 5Document43 pagesPrésentation 5fazfrito lacaviataPas encore d'évaluation
- AII - Chap 4 - Les Actionneurs Et Les PréactionneursDocument11 pagesAII - Chap 4 - Les Actionneurs Et Les Préactionneursfazfrito lacaviataPas encore d'évaluation
- UntitledDocument33 pagesUntitledfazfrito lacaviataPas encore d'évaluation
- AII - Chap 2 - Les APIDocument16 pagesAII - Chap 2 - Les APIfazfrito lacaviataPas encore d'évaluation
- Merged 20200625 153032.TextMarkDocument47 pagesMerged 20200625 153032.TextMarkfazfrito lacaviataPas encore d'évaluation
- Merged 20200625 152407.TextMarkDocument3 pagesMerged 20200625 152407.TextMarkfazfrito lacaviataPas encore d'évaluation
- Merged 20200625 151846.TextMarkDocument3 pagesMerged 20200625 151846.TextMarkfazfrito lacaviataPas encore d'évaluation
- M Ecanique Des FluidesDocument207 pagesM Ecanique Des Fluidesfazfrito lacaviataPas encore d'évaluation
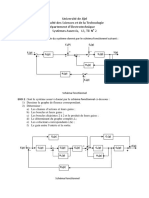
- Université de Jijel Faculté Des Sciences Et de La Technologie Département D'electrotechnique Systèmes Asservis, L3, TD N 1Document6 pagesUniversité de Jijel Faculté Des Sciences Et de La Technologie Département D'electrotechnique Systèmes Asservis, L3, TD N 1fazfrito lacaviataPas encore d'évaluation
- Modelisation Et Simulation D'une Mas A L'aide Du Simulink PDFDocument8 pagesModelisation Et Simulation D'une Mas A L'aide Du Simulink PDFhb1966100% (1)
- Travaux Dirigés N°3 Transfert Thermique Par Rayonnement Exercice 01Document2 pagesTravaux Dirigés N°3 Transfert Thermique Par Rayonnement Exercice 01fazfrito lacaviataPas encore d'évaluation
- 5ESPE Théorie Champs Tournants 2018 2019 2 en 1Document13 pages5ESPE Théorie Champs Tournants 2018 2019 2 en 1fazfrito lacaviataPas encore d'évaluation
- Ghamri KhaledDocument97 pagesGhamri Khaledfazfrito lacaviataPas encore d'évaluation
- EMDAss 2022Document4 pagesEMDAss 2022fazfrito lacaviataPas encore d'évaluation
- Corrige TD3Document2 pagesCorrige TD3fazfrito lacaviataPas encore d'évaluation
- TD1 & SolutionDocument6 pagesTD1 & Solutionfazfrito lacaviata100% (1)
- ELTF2TD2Document4 pagesELTF2TD2fazfrito lacaviataPas encore d'évaluation
- Université de Jijel Faculté Des Sciences Et de La Technologie Département D'electrotechnique Systèmes Asservis, L3, TD N 2Document6 pagesUniversité de Jijel Faculté Des Sciences Et de La Technologie Département D'electrotechnique Systèmes Asservis, L3, TD N 2fazfrito lacaviataPas encore d'évaluation
- Exercice Chapitre3 15Document2 pagesExercice Chapitre3 15fazfrito lacaviataPas encore d'évaluation
- DW DW DW CC DWDocument3 pagesDW DW DW CC DWfazfrito lacaviataPas encore d'évaluation
- TD4 Eltf2Document6 pagesTD4 Eltf2fazfrito lacaviataPas encore d'évaluation
- Présentation Sans TitreDocument2 pagesPrésentation Sans TitreSassi InesPas encore d'évaluation
- Logiciel MatérielDocument2 pagesLogiciel MatérielHakim MohamedPas encore d'évaluation
- BIGTREETECH PI4B Adapter V1.0 User Manual FRDocument14 pagesBIGTREETECH PI4B Adapter V1.0 User Manual FRdamienduinoPas encore d'évaluation
- Thème 2: Internet.: 1961: Naissance Communication Par Paquet 1974: Naissance 1989: Démocratisation D'internet GrâceDocument4 pagesThème 2: Internet.: 1961: Naissance Communication Par Paquet 1974: Naissance 1989: Démocratisation D'internet GrâceManault levacherPas encore d'évaluation
- Virtualisation Asa GuideDocument12 pagesVirtualisation Asa GuideJoel NguinaPas encore d'évaluation
- Social Media Marketing PowerPoint TemplatesDocument41 pagesSocial Media Marketing PowerPoint TemplatesYasmine MohcinePas encore d'évaluation
- ACACEDDocument15 pagesACACEDAlexandra UséPas encore d'évaluation
- TRE RS Rep+ & RS Rep-MIA300392-3Document12 pagesTRE RS Rep+ & RS Rep-MIA300392-3Laurent AnabaPas encore d'évaluation
- WMT05 06Document8 pagesWMT05 06Mohamed Anouar BidaPas encore d'évaluation
- Max VolDocument145 pagesMax VolCeren ErgulPas encore d'évaluation
- La Navigation InternetDocument9 pagesLa Navigation InternetangaPas encore d'évaluation
- Installation de Remote Desktop Services (RDS) Sur Windows Server 2012 R2 Et Publication D'une RemoteAppDocument15 pagesInstallation de Remote Desktop Services (RDS) Sur Windows Server 2012 R2 Et Publication D'une RemoteAppAina Tanjona Randriambolarivo100% (1)
- Polycopié Réseaux Informatiques CorrigéDocument98 pagesPolycopié Réseaux Informatiques CorrigéZidane TiogoPas encore d'évaluation
- Introduction Réseau Topologies - Protocoles Architectures en Couches (Modèles OSI, IEEE, TCP - IP) PDFDocument184 pagesIntroduction Réseau Topologies - Protocoles Architectures en Couches (Modèles OSI, IEEE, TCP - IP) PDFGreg Morris100% (1)
- Aut Log Vol1 v4Document175 pagesAut Log Vol1 v4Sylbe MarthePas encore d'évaluation
- Cours VHDL Et FPGADocument135 pagesCours VHDL Et FPGAMounira Tarhouni100% (1)
- 6.2.4.4 Packet Tracer - Configuring IPv6 Static and Default Routes InstructionsDocument3 pages6.2.4.4 Packet Tracer - Configuring IPv6 Static and Default Routes InstructionsBrazza In My VeinsPas encore d'évaluation
- Dzonde Naoussi Raoul 2011Document179 pagesDzonde Naoussi Raoul 2011Naz HaPas encore d'évaluation
- Comment Accéder Aux Données de Mon Smartphone Si Mon Écran Tactile Est Cassé - Samsung BE - FRDocument4 pagesComment Accéder Aux Données de Mon Smartphone Si Mon Écran Tactile Est Cassé - Samsung BE - FRdgnagbeinfoPas encore d'évaluation
- Proposition Devoir PremiereDocument2 pagesProposition Devoir PremiereDiaPas encore d'évaluation
- Rapport F DfinalDocument95 pagesRapport F Dfinalyassine EssoufiPas encore d'évaluation
- Chapitre 6 - GestionDeTransactionsDistribuéesDocument18 pagesChapitre 6 - GestionDeTransactionsDistribuéesCho ChiPas encore d'évaluation
- 10 Exemples de SMS Professionnels Que Vos Clients Veulent RecevoirDocument16 pages10 Exemples de SMS Professionnels Que Vos Clients Veulent RecevoirgilmarPas encore d'évaluation
- MemoireDocument109 pagesMemoirefilalk100% (1)
- Zaki ChahbounDocument10 pagesZaki ChahbounMOHAMED TAMZAITIPas encore d'évaluation
- Évaluation: Collège UrsuyaDocument1 pageÉvaluation: Collège UrsuyaDidier TchaleuPas encore d'évaluation
- Résumé POODocument3 pagesRésumé POOThéo Phanie100% (1)
- Rapport EMSI FinalDocument28 pagesRapport EMSI FinalAchraf MarchoudPas encore d'évaluation
- Rapport INBMIDocument31 pagesRapport INBMIhafsiaPas encore d'évaluation
- Cours SDFDocument283 pagesCours SDFsayedms9983Pas encore d'évaluation
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- La psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsD'EverandLa psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsPas encore d'évaluation
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Créer Son Propre Site Internet Et Son Blog GratuitementD'EverandCréer Son Propre Site Internet Et Son Blog GratuitementÉvaluation : 5 sur 5 étoiles5/5 (1)
- Création d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileD'EverandCréation d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Blockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondeD'EverandBlockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondePas encore d'évaluation
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- 101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerD'Everand101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)