Vous aimerez peut-être aussi
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- TP - Capteurs MMSS 2017 2018 - 2Document12 pagesTP - Capteurs MMSS 2017 2018 - 2simo100% (1)
- Rapport Des SimulationsDocument13 pagesRapport Des Simulationstarik1994Pas encore d'évaluation
- RAPPORT MLIV (1) - RemovedDocument22 pagesRAPPORT MLIV (1) - Removedsoumaya bsdPas encore d'évaluation
- Simulation D'un Hacheur Série Et Commande D'un Moteur À Courant ContinuDocument4 pagesSimulation D'un Hacheur Série Et Commande D'un Moteur À Courant ContinumarPas encore d'évaluation
- TPs Electronique de PuissanceDocument12 pagesTPs Electronique de Puissancejunior joelPas encore d'évaluation
- TP1 Onduleur MonophaséDocument8 pagesTP1 Onduleur MonophaséZayneb TekarriPas encore d'évaluation
- TRAVAUX PRATIQUES VHDL AMS ConvertisseurDocument11 pagesTRAVAUX PRATIQUES VHDL AMS ConvertisseurSanae SEPas encore d'évaluation
- TP Machine ConvertisseurDocument13 pagesTP Machine ConvertisseurMaryPas encore d'évaluation
- TP1CMDocument7 pagesTP1CMRomaissa LoulhaciPas encore d'évaluation
- TP Electronique de PuissanceDocument5 pagesTP Electronique de PuissanceGaël King'sPas encore d'évaluation
- TP ElechtroticniqueDocument5 pagesTP ElechtroticniqueAsm MaPas encore d'évaluation
- TP GradiateurDocument8 pagesTP GradiateurSeVILLA8Dz100% (1)
- TP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou AfanouDocument11 pagesTP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou AfanouHamid BendjelloulPas encore d'évaluation
- TP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou AfanouDocument11 pagesTP Electronique REDRESSEMENT FILTRAGE Par Armel Sitou Afanoukima lachgarPas encore d'évaluation
- Chapiter - 01Document20 pagesChapiter - 01ELmokhtar HamrouniPas encore d'évaluation
- Convertisseur DC DCDocument31 pagesConvertisseur DC DCخالد عامرPas encore d'évaluation
- ChapitreVI Les OnduleursDocument5 pagesChapitreVI Les OnduleursCaterina CasielloPas encore d'évaluation
- Monostable AstableDocument7 pagesMonostable Astablekonan franckPas encore d'évaluation
- Onduleurs Et Variation de Vitesse PSIMDocument21 pagesOnduleurs Et Variation de Vitesse PSIMBALLOUK Soufiane94% (17)
- Électronique de Puissance Laboratoire Nº1 Simulation Des Convertisseurs StatiquesDocument5 pagesÉlectronique de Puissance Laboratoire Nº1 Simulation Des Convertisseurs StatiquesFake ShtemaruPas encore d'évaluation
- Realisation CompensateurDocument45 pagesRealisation Compensateurmohamed_89Pas encore d'évaluation
- P1 - Commande MLI À Hystérésis Et MLI Triangulo-Sinusoïdale (SPWM) D'un Convertisseur PWM Triphasé À L'aide de Simulink M-File S-Functions-converti PDFDocument9 pagesP1 - Commande MLI À Hystérésis Et MLI Triangulo-Sinusoïdale (SPWM) D'un Convertisseur PWM Triphasé À L'aide de Simulink M-File S-Functions-converti PDFAli Chebabhi100% (2)
- TP Redressement FiltrageDocument12 pagesTP Redressement Filtrageواعر ياسينPas encore d'évaluation
- TP Elect Pui Shache Ur MosDocument3 pagesTP Elect Pui Shache Ur MosAbdø AboulQasimPas encore d'évaluation
- Tpmat 11Document34 pagesTpmat 11makroumPas encore d'évaluation
- Modéle de RedactionDocument31 pagesModéle de RedactionBöuäbdälläh AïmenPas encore d'évaluation
- SE1 - Microcap - Régime ContinuDocument19 pagesSE1 - Microcap - Régime ContinuPierre MarechalPas encore d'évaluation
- Multivibrateur Astable À TransistorDocument13 pagesMultivibrateur Astable À Transistorحمداوي عبد الباسط50% (2)
- Etude de Circuit de Commande Et de Puissance D'un Redresseur1Document31 pagesEtude de Circuit de Commande Et de Puissance D'un Redresseur1Nabil Ark100% (3)
- Modélisation de L - Onduleur de TensionDocument14 pagesModélisation de L - Onduleur de Tensionfarid saadPas encore d'évaluation
- Projet Grad Tri Part 1Document8 pagesProjet Grad Tri Part 1Lamyae AMMARIPas encore d'évaluation
- 507 Psim tp1 Court Circuit PDFDocument11 pages507 Psim tp1 Court Circuit PDFdjebienPas encore d'évaluation
- C BR FR HDR 01Document38 pagesC BR FR HDR 01Serge RINAUDOPas encore d'évaluation
- Compte Rendu de Mini Stage D'étéDocument38 pagesCompte Rendu de Mini Stage D'étéHasnae BohouchPas encore d'évaluation
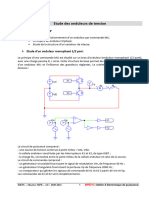
- Etude Des Onduleurs de TensionDocument5 pagesEtude Des Onduleurs de TensionNaima mecherguiPas encore d'évaluation
- TPcours OnduleurDocument6 pagesTPcours OnduleurMoatez BoukamchaPas encore d'évaluation
- Un OscilateurDocument9 pagesUn Oscilateurassia guzelPas encore d'évaluation
- Compte Rendu: Université de Sousse Institut Supérieur Des Sciences Appliquées Et de Technologie de SousseDocument7 pagesCompte Rendu: Université de Sousse Institut Supérieur Des Sciences Appliquées Et de Technologie de Soussedrissi kaitouni zineb100% (2)
- Ex6 Avec CorrigéDocument13 pagesEx6 Avec Corrigézouaniachraf4Pas encore d'évaluation
- Exercices Courant AlternatifDocument5 pagesExercices Courant AlternatifMichaux ArnaudPas encore d'évaluation
- Modélisation Et Simulation Du Moteur À Courant ContinuDocument5 pagesModélisation Et Simulation Du Moteur À Courant Continuعثمان عثمان100% (1)
- TP 01Document9 pagesTP 01HAMZA ALGERIAPas encore d'évaluation
- Asservissement D'un Vérin ÉlectriqueDocument6 pagesAsservissement D'un Vérin Électriquepeace.oumaimaPas encore d'évaluation
- TP 4Document8 pagesTP 4Zakaria ZmimPas encore d'évaluation
- TP EP SimulationDocument4 pagesTP EP SimulationMARIAM ZEROUALIPas encore d'évaluation
- TP1 DC Ennonce2Document5 pagesTP1 DC Ennonce2RidaAbdeLkrimiPas encore d'évaluation
- TP 4Document2 pagesTP 4Yorrick Valquin NgouyouPas encore d'évaluation
- Modélisation, Simulation Et Commande Des Processus ÉlectriqueDocument30 pagesModélisation, Simulation Et Commande Des Processus ÉlectriqueMustapha El MetouiPas encore d'évaluation
- Commande en Temps Reel Dun Onduleur Monophase Connecte A Un Reseau Sous LabviewDocument7 pagesCommande en Temps Reel Dun Onduleur Monophase Connecte A Un Reseau Sous LabviewadrarwalidPas encore d'évaluation
- Chaine de MesureDocument7 pagesChaine de MesureOthman Nasri100% (1)
- Simulation MCC: TPCEM-1.3Document4 pagesSimulation MCC: TPCEM-1.3AbderrahmanePas encore d'évaluation
- Fansi Sivakumaran CR TP2 MercrediDocument19 pagesFansi Sivakumaran CR TP2 MercrediSonny FansiPas encore d'évaluation
- BEpiezo 2015Document5 pagesBEpiezo 2015MBOCK NYOBEPas encore d'évaluation
- Tp HacheursDocument14 pagesTp Hacheursghafourmaryam711Pas encore d'évaluation
- LSEQ 1ere PartieDocument28 pagesLSEQ 1ere PartieSalmanPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- SigmaDocument2 pagesSigmaAli KPas encore d'évaluation
- D61PXi MoniteurDocument38 pagesD61PXi MoniteurXavier FontainePas encore d'évaluation
- Premier Exercice: (7 Points) Chauffe-Eau Solaire: Lire Attentivement L'extrait Suivant Puis Répondre Aux QuestionsDocument4 pagesPremier Exercice: (7 Points) Chauffe-Eau Solaire: Lire Attentivement L'extrait Suivant Puis Répondre Aux QuestionsHouda ChanPas encore d'évaluation
- CONDUITE TP2 Avec Quadrillage (1) 2Document6 pagesCONDUITE TP2 Avec Quadrillage (1) 2Agbatou Jean Baptiste N'chiepoPas encore d'évaluation
- Cour 1 - VirtualisationDocument24 pagesCour 1 - Virtualisationjeremie zehouPas encore d'évaluation
- Guide Investir Dans Les PME en AfriqueDocument74 pagesGuide Investir Dans Les PME en AfriquePDG EYAFPas encore d'évaluation
- Réussir Aux Différentes Évaluations D'un Entretien Part 1Document30 pagesRéussir Aux Différentes Évaluations D'un Entretien Part 1Daniel Constant AttaPas encore d'évaluation
- Entretien Du Reseau D'Eclairage Public Au Sein de La CommuneDocument24 pagesEntretien Du Reseau D'Eclairage Public Au Sein de La CommuneMProd AmmoPas encore d'évaluation
- Gagner de L'argent Avec YoutubeDocument7 pagesGagner de L'argent Avec Youtubeanon_811149744Pas encore d'évaluation
- Tome 2 Impacts EnvironnementauxDocument49 pagesTome 2 Impacts EnvironnementauxUlrich Ralph NjoyaPas encore d'évaluation
- T.D. N°2 - Les AmortissementsDocument3 pagesT.D. N°2 - Les Amortissementsangelinaa.bento05Pas encore d'évaluation
- UM Operation Manual FRFR 27021611646554123Document299 pagesUM Operation Manual FRFR 27021611646554123Georges TaradauxPas encore d'évaluation
- UN ASPECT MÉCONNU D'AVALOKITEŚVARA - de MallmannDocument9 pagesUN ASPECT MÉCONNU D'AVALOKITEŚVARA - de MallmannClaudia RamassoPas encore d'évaluation
- Document 1249Document11 pagesDocument 1249MrYodaaPas encore d'évaluation
- Katalogs-19-Fusibles A Couteaux NHDocument8 pagesKatalogs-19-Fusibles A Couteaux NHhakimPas encore d'évaluation
- L1 - GPL - Cours Numéro 01 La QualitéDocument13 pagesL1 - GPL - Cours Numéro 01 La Qualitéformation distancePas encore d'évaluation
- TP 02 La Masse VolumiqueDocument5 pagesTP 02 La Masse VolumiqueDai MentPas encore d'évaluation
- Guide de Logiciel Sap20000 CopierDocument54 pagesGuide de Logiciel Sap20000 CopierAbdou HababaPas encore d'évaluation
- RégimeDocument12 pagesRégimeernestito2010Pas encore d'évaluation
- Audit Cycle VenteDocument38 pagesAudit Cycle VenteaminePas encore d'évaluation
- T 200 IDocument36 pagesT 200 Iref100% (1)
- Déformé D'un Portique Bi-Encastré: Câble de Branchement Câbles Vers Les Appuis Du PortiqueDocument11 pagesDéformé D'un Portique Bi-Encastré: Câble de Branchement Câbles Vers Les Appuis Du PortiqueFarahBoughanmiPas encore d'évaluation
- Question Et Réponse 4Document15 pagesQuestion Et Réponse 4saraPas encore d'évaluation
- These ND PAreconf VF PDFDocument174 pagesThese ND PAreconf VF PDFRachid HamianiPas encore d'évaluation
- 3eme Biochimie 2019-2020 Bouzidi A L3 Bioch Cours ToxicologieDocument14 pages3eme Biochimie 2019-2020 Bouzidi A L3 Bioch Cours ToxicologieM.B. IsmailPas encore d'évaluation
- Guide Satellite Clubs FRDocument4 pagesGuide Satellite Clubs FRsoufiane mrabetPas encore d'évaluation
- Aid Memoire XP 18-545Document2 pagesAid Memoire XP 18-545Lotfi Merabet75% (4)
- InstallationDocument9 pagesInstallationfatihaPas encore d'évaluation
- Mouteur DCDocument7 pagesMouteur DCElmokh LassaadPas encore d'évaluation
- UltrafiltrationDocument10 pagesUltrafiltrationsoufyanePas encore d'évaluation