Vous aimerez peut-être aussi
- 2021 06 Metro ExoA Sujet2 SautElastique 5pts - 0 PDFDocument2 pages2021 06 Metro ExoA Sujet2 SautElastique 5pts - 0 PDFDaiki AonimePas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- 23 Pycj2g11Document12 pages23 Pycj2g11LETUDIANT100% (1)
- Dsc5 Seconde 2015 2016 CorrigeDocument4 pagesDsc5 Seconde 2015 2016 Corrigemamafati644Pas encore d'évaluation
- Travail Et Energie SkateDocument3 pagesTravail Et Energie SkategfPas encore d'évaluation
- 2017 09 Antilles Exo2 Sujet Skate 5ptsDocument3 pages2017 09 Antilles Exo2 Sujet Skate 5ptsMateus Pimenta CardosoPas encore d'évaluation
- TPP4-1Spe-Sujet-Chute LibreDocument3 pagesTPP4-1Spe-Sujet-Chute LibreceliabenayPas encore d'évaluation
- PCMterm Seq07 ExercicesDocument4 pagesPCMterm Seq07 Exercicesmoemenghanmi10Pas encore d'évaluation
- CINEMATIQUE Cours1Document17 pagesCINEMATIQUE Cours1fabienPas encore d'évaluation
- 2023 AmNord J1 Exo1 Sujet SkateRC 11pts - 0Document6 pages2023 AmNord J1 Exo1 Sujet SkateRC 11pts - 0grajzgrPas encore d'évaluation
- Fasc Tle C-DDocument93 pagesFasc Tle C-DSYLVAIN KOUADIOPas encore d'évaluation
- Contrôle N°8 Mai 2020 2H Nom: . .Document2 pagesContrôle N°8 Mai 2020 2H Nom: . .Minou RanariPas encore d'évaluation
- DM9 2011 - Saut À Ski + Catalyse CompletDocument12 pagesDM9 2011 - Saut À Ski + Catalyse CompletnePas encore d'évaluation
- Serie #6 1Document2 pagesSerie #6 1Smal AlaouiPas encore d'évaluation
- TP Mouvementplan InclineDocument2 pagesTP Mouvementplan InclineJean LeonardoPas encore d'évaluation
- P2a PRDocument8 pagesP2a PRDe la fuentePas encore d'évaluation
- secret resoures for any info text 0ivenDocument13 pagessecret resoures for any info text 0ivengeforyzenPas encore d'évaluation
- Louma SujetDocument18 pagesLouma SujetVlad ivanovskyPas encore d'évaluation
- 2 - TD - Croix de Malte MaintenanceDocument2 pages2 - TD - Croix de Malte Maintenancearwa bouazaouiPas encore d'évaluation
- TP Croix de Malte INDEXADocument9 pagesTP Croix de Malte INDEXASidi RachPas encore d'évaluation
- CO1 2S 2023 Iapg - WahabdiopDocument2 pagesCO1 2S 2023 Iapg - Wahabdiopzeynabou touréPas encore d'évaluation
- EPEREUVE DE PHYSIQUE 1er DDocument3 pagesEPEREUVE DE PHYSIQUE 1er DJoel MoyoPas encore d'évaluation
- 14SISCMLR1CDocument14 pages14SISCMLR1CFelix BonnetPas encore d'évaluation
- Physique TleC TD College Henri Dumont 2019 2020Document4 pagesPhysique TleC TD College Henri Dumont 2019 2020HENRIETTEPas encore d'évaluation
- Série 8 Physique Mouvement D'un SolideDocument4 pagesSérie 8 Physique Mouvement D'un SolideSamou_haa100% (2)
- TD 8 Cinématique 1ere PartieDocument3 pagesTD 8 Cinématique 1ere PartiedestextesecritsPas encore d'évaluation
- 2004 11 NelleCaledonie Sujet Exo3 Lancer Poids 5 5ptsDocument5 pages2004 11 NelleCaledonie Sujet Exo3 Lancer Poids 5 5ptsla physique selon le programme FrançaisPas encore d'évaluation
- Chapitre3-Exercice Cinematique Dynamique NewtonDocument8 pagesChapitre3-Exercice Cinematique Dynamique Newtonالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- Bac S Physique Chimie Polynesie 2015 SujetDocument14 pagesBac S Physique Chimie Polynesie 2015 SujethessasPas encore d'évaluation
- 2023 CtresEtrangers1 J2 Exo1 Sujet Plongeon 11pts - 0Document5 pages2023 CtresEtrangers1 J2 Exo1 Sujet Plongeon 11pts - 0gabinPas encore d'évaluation
- AsservissementDocument14 pagesAsservissementPiedmondPas encore d'évaluation
- TD 02 Meca Point ING ST JeanDocument7 pagesTD 02 Meca Point ING ST JeanMiguel AngePas encore d'évaluation
- Énergie CinématiqueDocument8 pagesÉnergie CinématiqueMari GoldPas encore d'évaluation
- Pile de PontDocument11 pagesPile de PontAndrei BilbiePas encore d'évaluation
- PREVISIONS TipeDocument21 pagesPREVISIONS Tipekaniki kun100% (3)
- Fiche de Revision DSC PhysiqueDocument10 pagesFiche de Revision DSC PhysiqueMed Brini100% (1)
- Série N°4. Changement de Référentiel - Composition Des Mouvements (SMAI1) 2020-21Document2 pagesSérie N°4. Changement de Référentiel - Composition Des Mouvements (SMAI1) 2020-21AHMED ES-SAHELYPas encore d'évaluation
- Memoire CoriolisDocument22 pagesMemoire CoriolisMēđ GouigaPas encore d'évaluation
- Nivellement DirectDocument6 pagesNivellement Directʚʬɞ Lon DoniʚʬɞPas encore d'évaluation
- CT 2021 2022Document3 pagesCT 2021 2022Aïmane CheikhPas encore d'évaluation
- Chapitre 1 - Mouvement Et VitesseDocument5 pagesChapitre 1 - Mouvement Et VitessePëtit VincentPas encore d'évaluation
- Chapitre 9 A1Document4 pagesChapitre 9 A1Alain KanaanPas encore d'évaluation
- E3c Spe Sciences Ingenieur Premiere 03797 Sujet OfficielDocument12 pagesE3c Spe Sciences Ingenieur Premiere 03797 Sujet OfficielKaled MRASSIPas encore d'évaluation
- RebondDocument51 pagesRebondالغزيزال الحسن EL GHZIZAL Hassane100% (1)
- Devoir 1 Surveille 2022 Semestre 1Document3 pagesDevoir 1 Surveille 2022 Semestre 1rayanjaidi01Pas encore d'évaluation
- S8 MovDocument4 pagesS8 Movramzi MoussaPas encore d'évaluation
- Exo Python Hatier 26Document1 pageExo Python Hatier 26Ashley BolouPas encore d'évaluation
- Projet D'introduction Robot Ericc StatiqueDocument5 pagesProjet D'introduction Robot Ericc StatiquefaycaldjemmadPas encore d'évaluation
- Sérice P1.2S.2024Document4 pagesSérice P1.2S.2024diopaminata48.alyPas encore d'évaluation
- Sujet MathDocument9 pagesSujet MathAbdelilah El GmairiPas encore d'évaluation
- ETLD 1 - Corrige - Physique 01-ST (2019-2020)Document7 pagesETLD 1 - Corrige - Physique 01-ST (2019-2020)NURHAN NtsPas encore d'évaluation
- Chap. 6 Calcul Des Portiques - Méthode Des Déplacements - 2 PDFDocument12 pagesChap. 6 Calcul Des Portiques - Méthode Des Déplacements - 2 PDFBoris Ganmavo80% (5)
- Un Modèle Pour La Balle de Tennis Pendant Le ServiceDocument3 pagesUn Modèle Pour La Balle de Tennis Pendant Le Servicevaltegue1Pas encore d'évaluation
- EsssDocument3 pagesEsssalae lalouiPas encore d'évaluation
- PC Gene 007 Sujet Exo2 Phy Klenergies 2Document5 pagesPC Gene 007 Sujet Exo2 Phy Klenergies 2sarahPas encore d'évaluation
- Terminale Controle7 BB Sujet2 CorrectionDocument23 pagesTerminale Controle7 BB Sujet2 Correctionm20263033Pas encore d'évaluation
- SiteEnoncé TD1 MecaDocument5 pagesSiteEnoncé TD1 Mecaromario marioPas encore d'évaluation
- Chapitre3-Exercice Cinematique Dynamique Newton PDFDocument8 pagesChapitre3-Exercice Cinematique Dynamique Newton PDFMichauxPas encore d'évaluation
- TD06_Manege_fete_foraine_sujet d'interroDocument3 pagesTD06_Manege_fete_foraine_sujet d'interroLolo57Pas encore d'évaluation
- Gaz de VilleDocument5 pagesGaz de VilleMeryem azPas encore d'évaluation
- CC2nde 2018 UniversDocument4 pagesCC2nde 2018 Universyardena.bokobzaPas encore d'évaluation
- CC2nde 2019 UniversDocument5 pagesCC2nde 2019 Universyardena.bokobzaPas encore d'évaluation
- CC2nde 2018 SportDocument4 pagesCC2nde 2018 Sportyardena.bokobzaPas encore d'évaluation
- 8 Polycopié D Exercices Et Examens Résolus - Mécanique Des FluidesDocument62 pages8 Polycopié D Exercices Et Examens Résolus - Mécanique Des FluidesMar Wa100% (1)
- Simulation Echangeurs Pour KarimDocument8 pagesSimulation Echangeurs Pour KarimYassine BouaichiPas encore d'évaluation
- Aspects ÉnergéDocument3 pagesAspects ÉnergéHaraf HarafPas encore d'évaluation
- RDM NotationsDocument1 pageRDM Notationsbtp formationPas encore d'évaluation
- Cours T 11 FlexionDocument7 pagesCours T 11 FlexionAbdelhak OuanzouguiPas encore d'évaluation
- Choix Moteur BrushlessDocument25 pagesChoix Moteur BrushlessHamza RezguiPas encore d'évaluation
- Corrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonDocument10 pagesCorrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonSabo100% (1)
- TH2016TROCNICOLASDocument113 pagesTH2016TROCNICOLASMassar SeckPas encore d'évaluation
- Leçon 1: Atome D'hydrogène Spining Et Précession Résonance Excitation Et Relaxation Génération Du Signal (FID)Document144 pagesLeçon 1: Atome D'hydrogène Spining Et Précession Résonance Excitation Et Relaxation Génération Du Signal (FID)Mohamed SeyidPas encore d'évaluation
- Phys 1ere C Minisession Av2022Document4 pagesPhys 1ere C Minisession Av2022Ngouen AnouarPas encore d'évaluation
- TD3 5ieme IGEDocument2 pagesTD3 5ieme IGElahbak abderrahmenePas encore d'évaluation
- Filtre Actif PassifDocument8 pagesFiltre Actif PassifZiko Jay AndaloussiPas encore d'évaluation
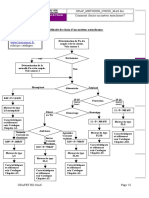
- Méthode de Choix D'un Moteur AsynchroneDocument3 pagesMéthode de Choix D'un Moteur AsynchroneSékhou DiakitéPas encore d'évaluation
- Energie HydrauliqueDocument3 pagesEnergie HydrauliqueMineur NdieulaPas encore d'évaluation
- Analyse VibratoireDocument21 pagesAnalyse VibratoireOmarPas encore d'évaluation
- Chapitre 7 - AntennesDocument6 pagesChapitre 7 - AntennesEmmanuel AlbertPas encore d'évaluation
- Cours - Sciences Physiques Adaptation Récepteur - Générateur - 2ème Sciences (2013-2014) MR Sakhraoui Noureddine PDFDocument2 pagesCours - Sciences Physiques Adaptation Récepteur - Générateur - 2ème Sciences (2013-2014) MR Sakhraoui Noureddine PDFRAY EVOLUTIONPas encore d'évaluation
- Prof Z Azzouz m1 Emeca Poly Ins ProDocument41 pagesProf Z Azzouz m1 Emeca Poly Ins Proمصعب دحمانيPas encore d'évaluation
- Fiche-Conv Unit Chiff SignDocument2 pagesFiche-Conv Unit Chiff SignbosmenPas encore d'évaluation
- Benosmane PDFDocument92 pagesBenosmane PDFsarah wiwiPas encore d'évaluation
- Les Premiers Travaux de Jean-Pierre Vigier Sur La Théorie Des Quanta: Une Rencontre Entre Science Et Marxisme (1951-1954)Document111 pagesLes Premiers Travaux de Jean-Pierre Vigier Sur La Théorie Des Quanta: Une Rencontre Entre Science Et Marxisme (1951-1954)virgile_bessonPas encore d'évaluation
- MQdec 2022Document3 pagesMQdec 2022Hicham Al FalouPas encore d'évaluation
- Chapitre 2Document12 pagesChapitre 2anasPas encore d'évaluation
- Ensa Hociema - Poster - SOUMAYA ELJANOUS - JR21Document5 pagesEnsa Hociema - Poster - SOUMAYA ELJANOUS - JR21ElJanousSoumayaPas encore d'évaluation
- Chimie: Première Partie: Étude de La Pile Zinc-NickelDocument2 pagesChimie: Première Partie: Étude de La Pile Zinc-Nickelyaasir ouukesoPas encore d'évaluation
- Partie Evaluations Des Ressources 15Pts Exercice 1 Pts Considère Dans L'équationDocument2 pagesPartie Evaluations Des Ressources 15Pts Exercice 1 Pts Considère Dans L'équationyvesyacinthendjoh1234Pas encore d'évaluation
- Mesure Hydraulique PotentiometreDocument47 pagesMesure Hydraulique Potentiometreghiz-Pas encore d'évaluation
- Inerie Fleche Poutre Acier AluDocument5 pagesInerie Fleche Poutre Acier AluNgouoPas encore d'évaluation
- 03-Animation Prise TerreDocument15 pages03-Animation Prise TerreLinda batolaPas encore d'évaluation
- THMOPQ - 04 Travail de Compression Adiabatique Reversible PDFDocument2 pagesTHMOPQ - 04 Travail de Compression Adiabatique Reversible PDFBertin KamsipaPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- La somme existentielle II/III Le mystère de l'homme: Un mystère d'amourD'EverandLa somme existentielle II/III Le mystère de l'homme: Un mystère d'amourPas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation