Vous aimerez peut-être aussi
- Cours Infographie 1Document129 pagesCours Infographie 1Saf BesPas encore d'évaluation
- Hydrologie Statistique PDFDocument153 pagesHydrologie Statistique PDFAhlam RA100% (1)
- TP Méthode NumériqueDocument19 pagesTP Méthode NumériqueSarah Hadjadj67% (3)
- TD N°1 Solution Introduction À La Régulation Industrielle.Document10 pagesTD N°1 Solution Introduction À La Régulation Industrielle.Mãl ÎkPas encore d'évaluation
- 1 BusCAN TrameDocument16 pages1 BusCAN Trameabdousewager100% (1)
- Capteurs/actuateurs Auto PDFDocument23 pagesCapteurs/actuateurs Auto PDFyassine89% (9)
- TP Asservissemet Lineaire l3 Licence Genie Biomedical1 Semestre5Document17 pagesTP Asservissemet Lineaire l3 Licence Genie Biomedical1 Semestre5moha100% (1)
- Methode Numerique PDFDocument88 pagesMethode Numerique PDFeduppz100% (1)
- TP Analyse Numerique PDFDocument21 pagesTP Analyse Numerique PDFEl Hassane El MchichiPas encore d'évaluation
- Cours de Methodes NumeriquesDocument88 pagesCours de Methodes Numeriquesfrahlia100% (1)
- Ex Ef PotenceDocument10 pagesEx Ef PotenceChafik BouguezourPas encore d'évaluation
- Sunbeam Bread Maker 5891Document44 pagesSunbeam Bread Maker 5891fwoomPas encore d'évaluation
- TP 3 CommandDocument14 pagesTP 3 CommandabdousewagerPas encore d'évaluation
- MendeDocument14 pagesMendeDilekh AnisPas encore d'évaluation
- Compte Rendu TP4 CSDDocument9 pagesCompte Rendu TP4 CSDRyzeFrodexPas encore d'évaluation
- Algebre de BooleDocument34 pagesAlgebre de Booleleila settiPas encore d'évaluation
- TP 1 RégulationDocument7 pagesTP 1 RégulationNa Dir SayahPas encore d'évaluation
- Cours Chap 6 Résolution Système LinèaireDocument37 pagesCours Chap 6 Résolution Système Linèairehamza jmiliPas encore d'évaluation
- MN I Ver01 Part01Document30 pagesMN I Ver01 Part01Nathaniel Nerquaye-tetteh100% (1)
- TP 2 - Partie Théorique - Détermination de La Fonction de Transfert Dun Systèm Et Tracé Des Réponses Temporelles Et FréquentiellesDocument10 pagesTP 2 - Partie Théorique - Détermination de La Fonction de Transfert Dun Systèm Et Tracé Des Réponses Temporelles Et Fréquentiellesأيمن بوهراوةPas encore d'évaluation
- Cours - Logique - Combinatoire18-03-2016 - NEW - PDF Filename - UTF-8''cours Logique combinatoire18-03-2016+NEWDocument44 pagesCours - Logique - Combinatoire18-03-2016 - NEW - PDF Filename - UTF-8''cours Logique combinatoire18-03-2016+NEWWissam TizaPas encore d'évaluation
- Command 2 EmeDocument9 pagesCommand 2 Emeabdousewager8080Pas encore d'évaluation
- Modélisation Des SystèmesDocument7 pagesModélisation Des Systèmestenere comPas encore d'évaluation
- Etude Des Systèmes 1er Et 2eme OrdreDocument22 pagesEtude Des Systèmes 1er Et 2eme Ordreasmaeelkortobi20Pas encore d'évaluation
- Asser - Fonction de TransfertDocument5 pagesAsser - Fonction de TransfertBenchettah OumaimaPas encore d'évaluation
- Support de Cours CHAPITRE II Modèle Mathématique Schéma Bloc Dun Système PDFDocument8 pagesSupport de Cours CHAPITRE II Modèle Mathématique Schéma Bloc Dun Système PDFTahrat ToufikPas encore d'évaluation
- TP2 Ese07 2021Document8 pagesTP2 Ese07 2021Cy LaiPas encore d'évaluation
- Enonce TP1 PDFDocument6 pagesEnonce TP1 PDFBourahla MouhamedPas encore d'évaluation
- Cours 1matlabDocument28 pagesCours 1matlabAymane AboussabrPas encore d'évaluation
- CHAP 3 Régulation IndustrielleDocument15 pagesCHAP 3 Régulation IndustrielleNidal BestPas encore d'évaluation
- Régulation Tp1Document9 pagesRégulation Tp1Ahmed BoualiPas encore d'évaluation
- TP01 RégulationDocument10 pagesTP01 RégulationAhmed BoualiPas encore d'évaluation
- Analyse Numerique GCDocument18 pagesAnalyse Numerique GCTech Device75Pas encore d'évaluation
- TP Hanae FatihaDocument26 pagesTP Hanae FatihaHanae MenounyPas encore d'évaluation
- TP 10 Automatiques2 (1) SOUDocument14 pagesTP 10 Automatiques2 (1) SOUOMAR RAHALIPas encore d'évaluation
- Chap 4 Analyses Temporelles Et Frequentielles Des Système FondamentauxDocument15 pagesChap 4 Analyses Temporelles Et Frequentielles Des Système FondamentauxKoum SouloumPas encore d'évaluation
- Analyse Numériqie PDFDocument32 pagesAnalyse Numériqie PDFismailinesPas encore d'évaluation
- Poly MN 2016-2017Document32 pagesPoly MN 2016-2017Moustapha ChaibdraaPas encore d'évaluation
- TP011Document16 pagesTP01118188yem3761Pas encore d'évaluation
- TP De1à19Document204 pagesTP De1à19zora samaPas encore d'évaluation
- TP1 AutomatiqueDocument14 pagesTP1 AutomatiqueM'tıraouı BadrPas encore d'évaluation
- Compte Rendu MatlabDocument29 pagesCompte Rendu MatlabHana ElPas encore d'évaluation
- ch1 3eme PartieDocument7 pagesch1 3eme Partiesid aliPas encore d'évaluation
- TD3: Equations Non LinéairesDocument6 pagesTD3: Equations Non Linéairesزهرة المدائنPas encore d'évaluation
- Partie III Schémas Numériques Et Algorithmes de Résolution Des Équations de TransportDocument33 pagesPartie III Schémas Numériques Et Algorithmes de Résolution Des Équations de TransportOUSSAMA DEBBABPas encore d'évaluation
- tp3 AsserviDocument11 pagestp3 AsservixeroxPas encore d'évaluation
- TP7 Souhail CheikhDocument31 pagesTP7 Souhail Cheikhzora samaPas encore d'évaluation
- Mini ProjetDocument9 pagesMini ProjetIslam LakatPas encore d'évaluation
- TD AsservtDocument4 pagesTD AsservtLiam SportPas encore d'évaluation
- Méthode Num SuiteDocument85 pagesMéthode Num Suiteoteme Mbella King Duclair100% (1)
- Asservissement Régulation FC C2Document23 pagesAsservissement Régulation FC C2Guency Alven Rhocky KOMBILAPas encore d'évaluation
- Chater TDDocument1 pageChater TDŤå Ř ÏqPas encore d'évaluation
- Auto S3 Se1Document1 pageAuto S3 Se1Mostafa BelaaroussiPas encore d'évaluation
- CHP 2 Determinant Et SystémeDocument13 pagesCHP 2 Determinant Et SystémeMouhanned bouteraaPas encore d'évaluation
- TP1Document6 pagesTP1Redouane RedaPas encore d'évaluation
- Théorie Des Mécanismes - 04Document24 pagesThéorie Des Mécanismes - 04baazizw1Pas encore d'évaluation
- CR RegulationDocument21 pagesCR Regulationsofia.chenkarPas encore d'évaluation
- Iinterpolation - CopieDocument41 pagesIinterpolation - Copieأبو كعب علاء الدينPas encore d'évaluation
- TP1 LQRDocument3 pagesTP1 LQRSelmane SaoudPas encore d'évaluation
- Se LevenshteinDocument3 pagesSe LevenshteinIbrahima GueyePas encore d'évaluation
- TP N°2: Transformée de Laplace Et La Détermination de La Fonction de TransfertDocument3 pagesTP N°2: Transformée de Laplace Et La Détermination de La Fonction de TransfertGhetra hichemPas encore d'évaluation
- TP1 CorrDocument3 pagesTP1 CorrAnassPas encore d'évaluation
- Chapitre 2 Modélisation Des SystèmesDocument12 pagesChapitre 2 Modélisation Des SystèmesAyoub MhdPas encore d'évaluation
- Tenseur trifocal: Explorer la profondeur, le mouvement et la structure en vision par ordinateurD'EverandTenseur trifocal: Explorer la profondeur, le mouvement et la structure en vision par ordinateurPas encore d'évaluation
- tp3 CommandeDocument6 pagestp3 CommandeabdousewagerPas encore d'évaluation
- Metalbi MaintenanceDocument10 pagesMetalbi MaintenanceabdousewagerPas encore d'évaluation
- TP - 4 NchadiDocument9 pagesTP - 4 NchadiabdousewagerPas encore d'évaluation
- Nouveau Document Microsoft WordDocument3 pagesNouveau Document Microsoft WordabdousewagerPas encore d'évaluation
- Examen Rattrapage MAI95 2018Document1 pageExamen Rattrapage MAI95 2018abdousewagerPas encore d'évaluation
- TD01Document2 pagesTD01abdousewagerPas encore d'évaluation
- Chapitre1 ActionneurDocument7 pagesChapitre1 ActionneurabdousewagerPas encore d'évaluation
- TP 3 ModDocument7 pagesTP 3 ModabdousewagerPas encore d'évaluation
- ProjectDocument7 pagesProjectabdousewagerPas encore d'évaluation
- C4 CdmaDocument20 pagesC4 CdmaF Nass BenPas encore d'évaluation
- 06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Document1 page06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Ghilles PoloPas encore d'évaluation
- MedafDocument42 pagesMedafYesmine JasminePas encore d'évaluation
- PP2 Cor MathDocument69 pagesPP2 Cor MathtotoPas encore d'évaluation
- Ece 19 SVT 01 V1Document2 pagesEce 19 SVT 01 V1AlexPas encore d'évaluation
- Détection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFDocument27 pagesDétection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFminiya1703Pas encore d'évaluation
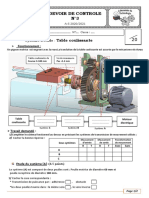
- Devoir de Controle N°3: Table CoulissanteDocument2 pagesDevoir de Controle N°3: Table CoulissanteTarekMostapha100% (1)
- KD455.50 Préconisations Montage Démontage - FRDocument7 pagesKD455.50 Préconisations Montage Démontage - FReric pineauPas encore d'évaluation
- Doctorat BelhouchetDocument184 pagesDoctorat Belhouchetfootball goalPas encore d'évaluation
- Commandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeDocument159 pagesCommandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeSofiane ZozoPas encore d'évaluation
- Scomazzon Pasal SMZ926Document225 pagesScomazzon Pasal SMZ926hiriPas encore d'évaluation
- Poinçonnement: LIM SovanvichetDocument13 pagesPoinçonnement: LIM SovanvichetPhal KhemraPas encore d'évaluation
- cryptographie ٠٩٤٠٤٦Document67 pagescryptographie ٠٩٤٠٤٦Amina BenhassinePas encore d'évaluation
- TP Api IiDocument11 pagesTP Api IiAdem AounPas encore d'évaluation
- Brochure Tech 2017 Techn Info Tournai 24pDocument28 pagesBrochure Tech 2017 Techn Info Tournai 24pDayang DayangPas encore d'évaluation
- TP6 Complx 2018-2019Document2 pagesTP6 Complx 2018-2019Hadjer KaddourPas encore d'évaluation
- Centrale, 2011, MP, Math Ematiques 1Document9 pagesCentrale, 2011, MP, Math Ematiques 1Max tekouPas encore d'évaluation
- Fopc 0720916e 4241Document4 pagesFopc 0720916e 4241Cyrielle DomguePas encore d'évaluation
- Ficha 7.0702 31 Honda Civic TypeR GroupeA FN2Document20 pagesFicha 7.0702 31 Honda Civic TypeR GroupeA FN2HugoPas encore d'évaluation
- Bimetre Sage Attic PDFDocument8 pagesBimetre Sage Attic PDFsarraPas encore d'évaluation
- Maths 4-TD2Document3 pagesMaths 4-TD2bmessaad1970Pas encore d'évaluation
- Tp1 BI-PythonDocument3 pagesTp1 BI-PythonHiba AmaraPas encore d'évaluation
- l3 tm1 Chapitre1 Lecon 01Document10 pagesl3 tm1 Chapitre1 Lecon 01Fatima LagnaouiPas encore d'évaluation
- UntitledDocument3 pagesUntitledyeheph yehephPas encore d'évaluation
- Concours General Mathematiques 2002 SujetDocument5 pagesConcours General Mathematiques 2002 SujetkkstanPas encore d'évaluation