Vous aimerez peut-être aussi
- Exercices RLC CorrigésDocument10 pagesExercices RLC CorrigésSeif Souid88% (50)
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Afnor NF T72 281Document63 pagesAfnor NF T72 281roem1104100% (2)
- CCP 2007 Phy1 MPDocument4 pagesCCP 2007 Phy1 MPAYMANE ESSOUIRIPas encore d'évaluation
- Physique SV 2022 1Document6 pagesPhysique SV 2022 1Serge DemirdjianPas encore d'évaluation
- Meca Exam 2013Document7 pagesMeca Exam 2013Nam KolyaPas encore d'évaluation
- Devoir de Synthese 2 2019 2020 22Document5 pagesDevoir de Synthese 2 2019 2020 22chihebPas encore d'évaluation
- Devoir de Contrôle N°3 2ème Semestre - Physique - 3ème Technique (2017-2018) MR Ramzi JlassiDocument2 pagesDevoir de Contrôle N°3 2ème Semestre - Physique - 3ème Technique (2017-2018) MR Ramzi JlassiFarouk LassouedPas encore d'évaluation
- Premier Exercice: (7 Points) Oscillateur Mécanique: I OG V VI DX DTDocument9 pagesPremier Exercice: (7 Points) Oscillateur Mécanique: I OG V VI DX DTAli RammalPas encore d'évaluation
- Oscillation Mécanique Tle SDocument9 pagesOscillation Mécanique Tle SEL HADJI MOR KOUTAPas encore d'évaluation
- Examen FR Physique 2013 2Document3 pagesExamen FR Physique 2013 2Mohamed ElouakilPas encore d'évaluation
- Physique 1Document7 pagesPhysique 1Harakat ElhoucinePas encore d'évaluation
- Bac Gabon Maths 2012 Series CEDocument9 pagesBac Gabon Maths 2012 Series CEJérémie NdjoyePas encore d'évaluation
- Série D'exercices N°1 - Sciences Physiques LE CONDENSATEUR ET LE DIPOLE RC - Bac Sciences Exp (2015-2016) MR Daghsni Sahbi PDFDocument4 pagesSérie D'exercices N°1 - Sciences Physiques LE CONDENSATEUR ET LE DIPOLE RC - Bac Sciences Exp (2015-2016) MR Daghsni Sahbi PDFMahmoud Essahbi Sahbi DaghsniPas encore d'évaluation
- Exercice 1Document3 pagesExercice 1hanane aissaoui0% (1)
- Examen N2Document4 pagesExamen N2Charif MohamedPas encore d'évaluation
- Premier Exercice Solide en RotationDocument6 pagesPremier Exercice Solide en RotationKeys of H.A.Pas encore d'évaluation
- Ls Phy 2017 I FRDocument7 pagesLs Phy 2017 I FRAlieePas encore d'évaluation
- Embrayage Mercedes (Centrale 2002) 7 TD Energetique Reponse 2015-2016Document23 pagesEmbrayage Mercedes (Centrale 2002) 7 TD Energetique Reponse 2015-2016Mahrez ZaafouriPas encore d'évaluation
- ctr1 2018Document2 pagesctr1 2018azzamPas encore d'évaluation
- FeuilleCourbes 2Document4 pagesFeuilleCourbes 2fwhyPas encore d'évaluation
- Courbes Du Plan ExercicesDocument2 pagesCourbes Du Plan Exercicesالضحك حتى تصبح مضحكPas encore d'évaluation
- TD Macanique Du Solide BCPST 2Document10 pagesTD Macanique Du Solide BCPST 2Ariel AdepoPas encore d'évaluation
- $examen Final S1 UM6PDocument5 pages$examen Final S1 UM6PIchrak madromiPas encore d'évaluation
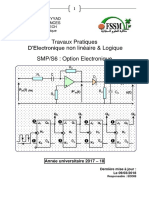
- Poly TP SMP S6 2018Document41 pagesPoly TP SMP S6 2018ANAS ETTANANIAPas encore d'évaluation
- CNC MP Physique2 1996c1Document9 pagesCNC MP Physique2 1996c1Lahcen ElamraouiPas encore d'évaluation
- Bond GraphsDocument19 pagesBond GraphsZack MansorPas encore d'évaluation
- Corrige Exam M.G s3 s1!20!21 - Ll2phDocument4 pagesCorrige Exam M.G s3 s1!20!21 - Ll2phBertrand DingamPas encore d'évaluation
- 1ère D 2D1S PCT 2022-2023 CEG YAGBE SujetDocument4 pages1ère D 2D1S PCT 2022-2023 CEG YAGBE Sujetcakpoyvette6Pas encore d'évaluation
- D2 1S1 2022 LSLLDocument2 pagesD2 1S1 2022 LSLLIbrahima Sène100% (1)
- Série D'exercices N°1 - Sciences Physiques Dipole RC - Bac Informatique (2014-2015) MR Daghsni SahbiDocument4 pagesSérie D'exercices N°1 - Sciences Physiques Dipole RC - Bac Informatique (2014-2015) MR Daghsni SahbiMahmoud Essahbi Sahbi DaghsniPas encore d'évaluation
- ' ' Premier Exercice (7 Points) Pendule Élastique HorizontalDocument6 pages' ' Premier Exercice (7 Points) Pendule Élastique HorizontalAli Rammal50% (2)
- 201703211048091Document6 pages201703211048091Donia El FerkhPas encore d'évaluation
- Premier Exercice: (7.5 Points) Oscillateur Mécanique HorizontalDocument8 pagesPremier Exercice: (7.5 Points) Oscillateur Mécanique HorizontalAli RammalPas encore d'évaluation
- Composition 1s1 2014 2015 Sem 1Document2 pagesComposition 1s1 2014 2015 Sem 1FRANCIS NDOURPas encore d'évaluation
- Physique Licence 2007Document6 pagesPhysique Licence 2007mpeckjordan1Pas encore d'évaluation
- 612a8ed5a1ce1sujet Corrige Courbes Parametrees Maths BtsDocument18 pages612a8ed5a1ce1sujet Corrige Courbes Parametrees Maths BtsAdelphe GomadoPas encore d'évaluation
- TD 1 VibrationsDocument27 pagesTD 1 Vibrationskaoutar soumatiPas encore d'évaluation
- Exercices TD L1BCGS 2021-2022tDocument10 pagesExercices TD L1BCGS 2021-2022tمحمد لمين قريشPas encore d'évaluation
- GS Physics Session 1 2019 French ExamDocument8 pagesGS Physics Session 1 2019 French Exambintou14gueyePas encore d'évaluation
- RLClibre Exerc TS17 FRDocument6 pagesRLClibre Exerc TS17 FRMohamed El Ouahdani100% (1)
- E Ph1tsi2014Document7 pagesE Ph1tsi2014Llouis PhysicsPas encore d'évaluation
- 2019-1-Phys SVDocument6 pages2019-1-Phys SVChadyPas encore d'évaluation
- Physique1 2015Document6 pagesPhysique1 2015Hilaire NSETH NGUEPas encore d'évaluation
- CNC Tsi Physique1 2014eDocument8 pagesCNC Tsi Physique1 2014eOussama ChoukerPas encore d'évaluation
- 201703220939245Document6 pages201703220939245Donia El FerkhPas encore d'évaluation
- Dev 1Document3 pagesDev 1Jeremie BoudreaultPas encore d'évaluation
- Devoir 5 SM Biof Arsalan PDFDocument3 pagesDevoir 5 SM Biof Arsalan PDFMed BriniPas encore d'évaluation
- I.A - Étude de La Résonance: G Gu GDocument14 pagesI.A - Étude de La Résonance: G Gu GAuréane DIACREPas encore d'évaluation
- TD Phys Ato MolDocument9 pagesTD Phys Ato MolTrandafir LacramioaraPas encore d'évaluation
- TP Corde VibranteDocument15 pagesTP Corde VibranteImen HammoudaPas encore d'évaluation
- Tirage 16Document3 pagesTirage 16karamella koukouPas encore d'évaluation
- TD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxDocument5 pagesTD N°2 Fonctions de L'electronique : Oscillateurs Quasi-SinusoïdauxÆn RåçhPas encore d'évaluation
- 15 MP Sujet PhyDocument8 pages15 MP Sujet PhyHarakat ElhoucinePas encore d'évaluation
- BTS GO 1ère Année Sujet Corrigé Courbes ParamétréesDocument17 pagesBTS GO 1ère Année Sujet Corrigé Courbes ParamétréesIsma ZerboPas encore d'évaluation
- SUJET 01 L1 Sciences Physiques VFDocument4 pagesSUJET 01 L1 Sciences Physiques VFMaïga AbdoulPas encore d'évaluation
- PB 097Document1 pagePB 097Salah GamerPas encore d'évaluation
- Uir Session Mai 2022Document8 pagesUir Session Mai 2022sabrinemabchour1Pas encore d'évaluation
- Devoir de Contrôle N°2 - Sciences PhysiquesDocument3 pagesDevoir de Contrôle N°2 - Sciences Physiqueskougfst ldhd100% (1)
- MP066 TD2Document2 pagesMP066 TD2Elisée Souarez DjaoyangPas encore d'évaluation
- Physique 1 CNC MP 2009 ÉnoncéDocument12 pagesPhysique 1 CNC MP 2009 Énoncéelhaffarisoumia123Pas encore d'évaluation
- CNC MP 2006 MécaniqueDocument2 pagesCNC MP 2006 Mécaniqueelhaffarisoumia123Pas encore d'évaluation
- Physique Chimie E3A MP 2016 CorrigéDocument7 pagesPhysique Chimie E3A MP 2016 Corrigéelhaffarisoumia123Pas encore d'évaluation
- Physique-Chimie CCP MP 2016 ÉnoncéDocument8 pagesPhysique-Chimie CCP MP 2016 Énoncéelhaffarisoumia123Pas encore d'évaluation
- Physique Chimie 1 Centrale MP 2016 CorrigéDocument6 pagesPhysique Chimie 1 Centrale MP 2016 Corrigéelhaffarisoumia123Pas encore d'évaluation
- Présentation EAMDocument30 pagesPrésentation EAMNoureddine OUSMAILPas encore d'évaluation
- TB 22 Phylogenie FicheDocument18 pagesTB 22 Phylogenie Fichefadoulzerbo95Pas encore d'évaluation
- Note D'expertise Technique - Dégâts Immobiliers Par Infiltration D'eau À Travers Une StructureDocument21 pagesNote D'expertise Technique - Dégâts Immobiliers Par Infiltration D'eau À Travers Une StructureZITه BBOYPas encore d'évaluation
- 06 FormationdelurineDocument1 page06 FormationdelurinePape SabalyPas encore d'évaluation
- Naturaliste Canadien - Vol - 136-3 - Ete - 2012-MinDocument106 pagesNaturaliste Canadien - Vol - 136-3 - Ete - 2012-MinwfkmplptbmfjtpxdtgPas encore d'évaluation
- Chapitre5 PDFDocument26 pagesChapitre5 PDFlangagecccPas encore d'évaluation
- DIHDocument74 pagesDIHilya_novikov612100% (1)
- Algèbre1 230307Document26 pagesAlgèbre1 230307samandoulgoubenPas encore d'évaluation
- Faslh These BC 23 0024Document352 pagesFaslh These BC 23 0024Juniør TsafackPas encore d'évaluation
- Poly 13x14 AromatiquesDocument19 pagesPoly 13x14 AromatiquesMohamed DahmanePas encore d'évaluation
- Diagramme Air HumideDocument1 pageDiagramme Air HumideAbde TamPas encore d'évaluation
- Contrôle Par RessuageDocument36 pagesContrôle Par Ressuagefathi100% (1)
- CV - 2023-10-13 - Christ - Mvina NtualaDocument1 pageCV - 2023-10-13 - Christ - Mvina NtualaC.M SebenPas encore d'évaluation
- Guide Pratique Audit Fiche de LectureDocument6 pagesGuide Pratique Audit Fiche de LectureMounir ZakiPas encore d'évaluation
- Fiche Peda D Devoir 1bac 1Document2 pagesFiche Peda D Devoir 1bac 1harira50% (2)
- Aventure Mystérieuse Robert Charroux Propos Sur L'avenir SpatialDocument41 pagesAventure Mystérieuse Robert Charroux Propos Sur L'avenir Spatialanneavrillaut100% (1)
- Attestation de Loyer Et de Résidence en FoyerDocument2 pagesAttestation de Loyer Et de Résidence en FoyermanelsatouriPas encore d'évaluation
- Fassi Fihri Ahmed MEnv 2016Document122 pagesFassi Fihri Ahmed MEnv 2016Hafid ErrabiyPas encore d'évaluation
- Les ArgilesDocument184 pagesLes ArgilesMariem NizarPas encore d'évaluation
- Maintenance 26Document48 pagesMaintenance 26Paméla HakmiPas encore d'évaluation
- Esprit Bonsaï 2022-08-09Document84 pagesEsprit Bonsaï 2022-08-09onerPas encore d'évaluation
- Analyse CombinatoireDocument7 pagesAnalyse CombinatoireCristiano da silvaPas encore d'évaluation
- Ana 36Document17 pagesAna 36Smail RCAPas encore d'évaluation
- Mon Tfe Chapitre 3Document11 pagesMon Tfe Chapitre 3Magloire TshihilukaPas encore d'évaluation
- Les Trois Groupes de Verbes: Chanter, Manger, Tomber, LaverDocument5 pagesLes Trois Groupes de Verbes: Chanter, Manger, Tomber, LaverJacky JophePas encore d'évaluation
- Reynard Jean Michel Sans SujetDocument62 pagesReynard Jean Michel Sans SujetflorentPas encore d'évaluation
- Poly Physiologie Cellulaire - Contraction Musculaire 2006-2007Document91 pagesPoly Physiologie Cellulaire - Contraction Musculaire 2006-2007roger kinaPas encore d'évaluation
- Histoire-Géographie CE1Document6 pagesHistoire-Géographie CE1Rocha Osman HO YhatPas encore d'évaluation
- Rapport de StageDocument58 pagesRapport de Stagenagnouma kamaraPas encore d'évaluation