Vous aimerez peut-être aussi
- TEF Format NewDocument94 pagesTEF Format NewSwapna Vasudevan Anand80% (5)
- Cours Geotech Fondations Superficielles NF94291Document45 pagesCours Geotech Fondations Superficielles NF94291Yasmine100% (1)
- Rapport de StageDocument6 pagesRapport de Stageljr21Pas encore d'évaluation
- 02-Propriétés de Base Du Sol Et de La Phase Liquide PDFDocument29 pages02-Propriétés de Base Du Sol Et de La Phase Liquide PDFAbdou HababaPas encore d'évaluation
- Travail 4Document8 pagesTravail 4kianpi urielPas encore d'évaluation
- L'enrobageDocument21 pagesL'enrobageAzmi AnassPas encore d'évaluation
- Série N°05 - Fondations Superficielles PDFDocument3 pagesSérie N°05 - Fondations Superficielles PDFel batoul mammouPas encore d'évaluation
- 2 Hydraulique Des Sols PDFDocument12 pages2 Hydraulique Des Sols PDFadsinnatePas encore d'évaluation
- NC Ouvrage de SectionnementDocument6 pagesNC Ouvrage de SectionnementhamoudaPas encore d'évaluation
- BP 2 M1 Pertes de PrécontrainteDocument8 pagesBP 2 M1 Pertes de PrécontrainteJean StephanePas encore d'évaluation
- Organigramme PoteauDocument1 pageOrganigramme PoteaubouhraisalwaPas encore d'évaluation
- Rappel Mecanique Des Sols PDFDocument53 pagesRappel Mecanique Des Sols PDFMazenAyadiPas encore d'évaluation
- Poids Total de La StructureDocument23 pagesPoids Total de La StructureHanane BenGamraPas encore d'évaluation
- Charge TriangulaireDocument2 pagesCharge TriangulaireYouness CharihPas encore d'évaluation
- Etude Et Conception D'un Pont À Poutres en Béton Précontraint Sur Oued MedjerdaDocument66 pagesEtude Et Conception D'un Pont À Poutres en Béton Précontraint Sur Oued MedjerdamouhidinePas encore d'évaluation
- Géotechnique - Chapitre 5 - Fondations ProfondesDocument13 pagesGéotechnique - Chapitre 5 - Fondations ProfondesMahamane MaâzouPas encore d'évaluation
- 02-COURS BP CHapitre 2 - Technologie Des Systèmes PPT - EtudiantsDocument88 pages02-COURS BP CHapitre 2 - Technologie Des Systèmes PPT - EtudiantsMeissa BeyePas encore d'évaluation
- Formulaire Flèches Et Rotations de Poutres IsostatiquesDocument2 pagesFormulaire Flèches Et Rotations de Poutres IsostatiquesscottalumilePas encore d'évaluation
- Pfe 1Document114 pagesPfe 1alifatmaPas encore d'évaluation
- Rappel Méthode de Coupures Exercices CorrigésDocument6 pagesRappel Méthode de Coupures Exercices CorrigésAbdellah DaoudiPas encore d'évaluation
- Fiche TD N°02 + SolutionsDocument7 pagesFiche TD N°02 + SolutionsMébãrkį MH100% (1)
- Chapitre 03 - Méthode Des Forces 2018Document9 pagesChapitre 03 - Méthode Des Forces 2018rabehiPas encore d'évaluation
- Poteau XDocument7 pagesPoteau XMohsin El YalaouiPas encore d'évaluation
- Notice Dermofix 0.02 Creme T 20gDocument1 pageNotice Dermofix 0.02 Creme T 20gNaruto & SasukePas encore d'évaluation
- TD StatiqueDocument9 pagesTD StatiqueBaye DiopPas encore d'évaluation
- Plaques 2010Document41 pagesPlaques 2010didinePas encore d'évaluation
- 6-Fondations SuperficiellesDocument26 pages6-Fondations SuperficiellesSerigne Abdoul Aziz MbodjPas encore d'évaluation
- Présentation1 BPDocument8 pagesPrésentation1 BPAyman Mejdoub100% (1)
- RAPPORT Formulation Béton HydrauliqueDocument69 pagesRAPPORT Formulation Béton Hydrauliquearnaud kouonangPas encore d'évaluation
- Srie 2 PDFDocument4 pagesSrie 2 PDFaliabdalghafourPas encore d'évaluation
- Examen Janv 2007 Efdynamique m2Document20 pagesExamen Janv 2007 Efdynamique m2Anonymous 80p9OVPas encore d'évaluation
- Mini Projet M1.Document3 pagesMini Projet M1.Slimane ZadoudPas encore d'évaluation
- Rapport PS PlaquesDocument15 pagesRapport PS PlaquesSaleh Zfr100% (1)
- 05 - BA05 Adherence CoursDocument8 pages05 - BA05 Adherence CoursAnani FernandPas encore d'évaluation
- Tableau Des AciersDocument1 pageTableau Des AciersIkram DahmaniPas encore d'évaluation
- Béton - Justification de La Resistance D'un Mur de Soutenement PDFDocument25 pagesBéton - Justification de La Resistance D'un Mur de Soutenement PDFS MPas encore d'évaluation
- Mode Opératoire Pour La Réalisation D'essais de Résistance Sur Blocs de Terre CompriméeDocument3 pagesMode Opératoire Pour La Réalisation D'essais de Résistance Sur Blocs de Terre CompriméeZaineb Ben AbdallahPas encore d'évaluation
- Analyse GranulometriqueDocument9 pagesAnalyse GranulometriqueMiller KegnePas encore d'évaluation
- Généralités Sur Les Pont PDFDocument40 pagesGénéralités Sur Les Pont PDFSoumana AbdouPas encore d'évaluation
- Chapitre2 Exo PDFDocument2 pagesChapitre2 Exo PDFIlyes BenhacenePas encore d'évaluation
- TAF 3 Calcul Dynamique - Watsop Piankeu Noel - 16G03301 PDFDocument9 pagesTAF 3 Calcul Dynamique - Watsop Piankeu Noel - 16G03301 PDFwatsopPas encore d'évaluation
- Devoir DR MoussaDocument87 pagesDevoir DR MoussaEmma SamPas encore d'évaluation
- Organigramme FS ELUDocument1 pageOrganigramme FS ELUAminePas encore d'évaluation
- Effort TranchantDocument7 pagesEffort TranchantÏ'm LëgëndPas encore d'évaluation
- Flexion Simple Section en Té ELSDocument1 pageFlexion Simple Section en Té ELSoumaima el ftouh slassi100% (1)
- Reconaissance Du Sol Au Pnemometre Dynamyque PDFDocument0 pageReconaissance Du Sol Au Pnemometre Dynamyque PDFRedha MerkhiPas encore d'évaluation
- Analyse Limite 2021Document40 pagesAnalyse Limite 2021Fisso Ben BenPas encore d'évaluation
- Poutres ContinuesDocument24 pagesPoutres ContinuesChristian MilleriouxPas encore d'évaluation
- Chapitre 5 Ba TractionDocument6 pagesChapitre 5 Ba TractionmtssofienePas encore d'évaluation
- Chapitre 08 Poutre ContinuDocument9 pagesChapitre 08 Poutre ContinuRania Ben HassinePas encore d'évaluation
- Compte Rendu PlaxisDocument17 pagesCompte Rendu PlaxisKhaoula MessaoudiPas encore d'évaluation
- Liste Récapitulative Questions-Réponses - EUROCODES - Assistance OADocument19 pagesListe Récapitulative Questions-Réponses - EUROCODES - Assistance OAFatiha ZelmatPas encore d'évaluation
- Equation Aux: Élastiques)Document6 pagesEquation Aux: Élastiques)Kocouvi Agapi HouanouPas encore d'évaluation
- Dimensionnement Des Structures Mtalliques NDC EGLISEDocument12 pagesDimensionnement Des Structures Mtalliques NDC EGLISEJoseph G B AMONPas encore d'évaluation
- Calcul de PoteletDocument5 pagesCalcul de PoteletFarizPas encore d'évaluation
- Travaux Dirigés MétréDocument12 pagesTravaux Dirigés MétréYves AhlonsouPas encore d'évaluation
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation
- L' Ingénieur et le développement durableD'EverandL' Ingénieur et le développement durableÉvaluation : 2 sur 5 étoiles2/5 (1)
- Précis de télédétection - Volume 3: Traitements numériques d'images de télédétectionD'EverandPrécis de télédétection - Volume 3: Traitements numériques d'images de télédétectionPas encore d'évaluation
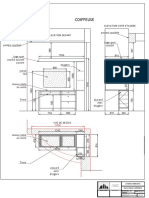
- Coiffeuse Et Placards D'angle PDFDocument2 pagesCoiffeuse Et Placards D'angle PDFljr21Pas encore d'évaluation
- Decret 2007-009 Du 9 Janvier 2007 CDI Et PreavisDocument1 pageDecret 2007-009 Du 9 Janvier 2007 CDI Et Preavisljr21Pas encore d'évaluation
- Aciers Mottard 12 1Document1 pageAciers Mottard 12 1ljr21Pas encore d'évaluation
- 81-Ipea IpeDocument4 pages81-Ipea Ipeljr21Pas encore d'évaluation
- Francais - Exercice D'articulationDocument12 pagesFrancais - Exercice D'articulationljr21Pas encore d'évaluation
- Isolation Mur Laine Minerale Semi Rigide GR32 RouleDocument2 pagesIsolation Mur Laine Minerale Semi Rigide GR32 Rouleljr21Pas encore d'évaluation
- Calcul DallageDocument20 pagesCalcul Dallagebebe13004Pas encore d'évaluation
- Ald Hors Liste - Pnds Sur La Dysplasie Fibreuse Des OsDocument81 pagesAld Hors Liste - Pnds Sur La Dysplasie Fibreuse Des Osljr21Pas encore d'évaluation
- Decret 2007-009 Du 9 Janvier 2007 CDI Et PreavisDocument5 pagesDecret 2007-009 Du 9 Janvier 2007 CDI Et Preavisljr21Pas encore d'évaluation
- Alucobond Et MR Collé PDFDocument52 pagesAlucobond Et MR Collé PDFljr21Pas encore d'évaluation
- Chapitre 1 - Eléments de Physique NucléaireDocument69 pagesChapitre 1 - Eléments de Physique NucléaireMohamed El Hadi Redjaimia100% (1)
- EXP-MN-SE060-FR-R0 - La Génération D'électricitée PDFDocument127 pagesEXP-MN-SE060-FR-R0 - La Génération D'électricitée PDFanis louam100% (1)
- IB Molènes Thalie De. François Et La Petite Tahitienne 1956Document179 pagesIB Molènes Thalie De. François Et La Petite Tahitienne 1956SaurinYanickPas encore d'évaluation
- 137Document2 pages137Oecox Cah DjadoelPas encore d'évaluation
- Dimentionnement D'une Installa - El Azzouzy Chaymae - 2389Document43 pagesDimentionnement D'une Installa - El Azzouzy Chaymae - 2389maria100% (1)
- These Univ JFosseDocument412 pagesThese Univ JFosseOussama AymenPas encore d'évaluation
- Presentation GeneraleDocument4 pagesPresentation GeneraleebodesedricPas encore d'évaluation
- Arthur AronDocument2 pagesArthur ArontchekedadayaPas encore d'évaluation
- Chapitre 1 - Objectifs Et Cadre de La CAEDocument4 pagesChapitre 1 - Objectifs Et Cadre de La CAEthibaut darmagnacPas encore d'évaluation
- Course V1oniris159001session03 - Semaine1 Biologie Des AbeillesDocument26 pagesCourse V1oniris159001session03 - Semaine1 Biologie Des AbeillesMeadanPas encore d'évaluation
- Rapport Gesip 2011 01Document115 pagesRapport Gesip 2011 01Hedi Ben Mohamed100% (1)
- Poser Des MouluresDocument20 pagesPoser Des MouluresedysonePas encore d'évaluation
- Rc3a9vision Dynamique Des Solides Indc3a9formablesDocument68 pagesRc3a9vision Dynamique Des Solides Indc3a9formablesyassinedabboussi42Pas encore d'évaluation
- TalendOpenStudio DI GettingStarted FR 7.1.1Document39 pagesTalendOpenStudio DI GettingStarted FR 7.1.1Yacine MaastrichtPas encore d'évaluation
- Exercices Mas PDFDocument6 pagesExercices Mas PDFKhaled OuniPas encore d'évaluation
- Sommaire RdE 01032018Document44 pagesSommaire RdE 01032018trevisani-andreaPas encore d'évaluation
- Nouvelle-Calédonie: Militaire D'activeDocument6 pagesNouvelle-Calédonie: Militaire D'activeThomas Kirov AlbertPas encore d'évaluation
- PROCEDURE CAS en Milieu Professionnel Extra Milieu de Soins Version Validée ConvertiDocument5 pagesPROCEDURE CAS en Milieu Professionnel Extra Milieu de Soins Version Validée ConvertiFhimi JdidiPas encore d'évaluation
- Plaquette Primo Declarant V2Document4 pagesPlaquette Primo Declarant V2Tlahuizcalpantecuhtli SvobodaPas encore d'évaluation
- Cours EntierDocument58 pagesCours Entiermohamed laghribPas encore d'évaluation
- Ecn-2060 A18 91298Document11 pagesEcn-2060 A18 91298Chris FloricPas encore d'évaluation
- Inspection CompacteurDocument4 pagesInspection Compacteurluc fodonpPas encore d'évaluation
- Etude Et Conception Dune Serre Agricole AutonomeDocument54 pagesEtude Et Conception Dune Serre Agricole AutonomeFati RetPas encore d'évaluation
- Préinscription À La Faculté Des Sciences Aïn Chock NDocument2 pagesPréinscription À La Faculté Des Sciences Aïn Chock Nphysiquesmp33Pas encore d'évaluation
- Thèmes M13 Présentation TMSIRDocument29 pagesThèmes M13 Présentation TMSIREL Bousâady YoussefPas encore d'évaluation
- Cuota Mensual Tasa Duración PrincipalDocument6 pagesCuota Mensual Tasa Duración PrincipalCarlo MurguiaPas encore d'évaluation
- Fcts Trigo RecDocument4 pagesFcts Trigo RecWalid TliliPas encore d'évaluation
- FICHE Eleve ParureDocument2 pagesFICHE Eleve ParureSoudosuPas encore d'évaluation