Vous aimerez peut-être aussi
- Systeme D'injection Electronique Common RailDocument19 pagesSysteme D'injection Electronique Common Railaymendab100% (3)
- SSP253 - F-L'injection Directe D'essence Avec Le Système Bosch Motronic MED 7Document60 pagesSSP253 - F-L'injection Directe D'essence Avec Le Système Bosch Motronic MED 7Ouaret BmtPas encore d'évaluation
- C 12232 FR FormateurDocument47 pagesC 12232 FR FormateurmahdiPas encore d'évaluation
- Caractéristiques: Généralités Éléments Constitutifs Du MoteurDocument11 pagesCaractéristiques: Généralités Éléments Constitutifs Du MoteurNicolas DuboisPas encore d'évaluation
- Bosch Infotech 1 2010 Special FR3Document15 pagesBosch Infotech 1 2010 Special FR3chokrib100% (1)
- Notice Turbo PSA 1,4 1,6 HDIDocument4 pagesNotice Turbo PSA 1,4 1,6 HDIDamien LEGRANDPas encore d'évaluation
- Master 2Document44 pagesMaster 2Guéween ChassériaudPas encore d'évaluation
- Guide Formateur 0704 0714 EMTA4 51966 51972Document218 pagesGuide Formateur 0704 0714 EMTA4 51966 51972garcy chasse100% (2)
- AutomobilesDocument31 pagesAutomobilesbenadda makhloufPas encore d'évaluation
- Guide - Formateur Et FPA ESS 2020Document300 pagesGuide - Formateur Et FPA ESS 2020garcy chassePas encore d'évaluation
- Ab Manual-FDocument81 pagesAb Manual-FmawooaPas encore d'évaluation
- Pre Common RailDocument25 pagesPre Common RailAbdelkarim Amine100% (1)
- Moteur Thermique Bts MavaDocument16 pagesMoteur Thermique Bts Mavariadh100% (1)
- G 01514 FR Dephaseur A A C Inj Dir Et IndirDocument49 pagesG 01514 FR Dephaseur A A C Inj Dir Et Indirmahdi100% (1)
- Notice Montage Turbo 1 6 HdiDocument11 pagesNotice Montage Turbo 1 6 HdiRUBIELLA JEAN FRANCOIS100% (1)
- Brochure Technique de Fltration 51786Document48 pagesBrochure Technique de Fltration 51786DhiaPas encore d'évaluation
- G 01509 FR TP Stagiaire Inj DirDocument157 pagesG 01509 FR TP Stagiaire Inj DirmahdiPas encore d'évaluation
- G 01513 FR Sys Inj All Ess IndirectDocument148 pagesG 01513 FR Sys Inj All Ess IndirectmahdiPas encore d'évaluation
- G 01513 FR Sys Inj All Ess IndirectDocument148 pagesG 01513 FR Sys Inj All Ess IndirectmahdiPas encore d'évaluation
- M10 Réparation Du Moteur DieselDocument42 pagesM10 Réparation Du Moteur Dieselإدناصر رشيد67% (3)
- SSP 198 Le Moteur V6 Biturbo de 2,7l PDFDocument72 pagesSSP 198 Le Moteur V6 Biturbo de 2,7l PDFFred FredyPas encore d'évaluation
- Ssp129 - FR Start-Stop Et Récupération ÉnergétiqueDocument44 pagesSsp129 - FR Start-Stop Et Récupération ÉnergétiqueNinou Vivano100% (1)
- SSP131 - FR Moteur 1,6 L TDi CRDocument40 pagesSSP131 - FR Moteur 1,6 L TDi CRNinou VivanoPas encore d'évaluation
- 06 ConstitutionDocument21 pages06 ConstitutionMed ChetPas encore d'évaluation
- MR337CLIO1Document212 pagesMR337CLIO1Damien LaffiteauPas encore d'évaluation
- Cahier Fran AisDocument18 pagesCahier Fran Aisbogdanxp2000Pas encore d'évaluation
- Le Capteur PMH InductifDocument8 pagesLe Capteur PMH InductifAnonymous mpmYglTeqZPas encore d'évaluation
- Systeme de Carburant DieselDocument79 pagesSysteme de Carburant Dieselpompelargeur100% (1)
- Cours1 Generalites Moteurfep0011 130327194821 Phpapp01.ppsxDocument19 pagesCours1 Generalites Moteurfep0011 130327194821 Phpapp01.ppsxSaloum ThioubPas encore d'évaluation
- Ofppt Royaume Du Maroc Module N - 20 Secteur - Reparation Des Engins A Moteur Specialite - Deea Niveau - Technicien Specialise Fev 2004Document104 pagesOfppt Royaume Du Maroc Module N - 20 Secteur - Reparation Des Engins A Moteur Specialite - Deea Niveau - Technicien Specialise Fev 2004Salah eddinePas encore d'évaluation
- Ssp095 - FR Eobd DieselDocument24 pagesSsp095 - FR Eobd DieselAzimPas encore d'évaluation
- Cour Techno La Distribution3 ProfDocument13 pagesCour Techno La Distribution3 Profismail100% (1)
- Turbo Manuel FRDocument26 pagesTurbo Manuel FRZied Ktari100% (2)
- SSP 344 Partie 1 Audi A6 Avant 05Document15 pagesSSP 344 Partie 1 Audi A6 Avant 05Mohammed MochrifPas encore d'évaluation
- SSP 334 Moteur FSi - AlimentationDocument20 pagesSSP 334 Moteur FSi - AlimentationAYOUBPas encore d'évaluation
- Schemas Electrique1 PDFDocument204 pagesSchemas Electrique1 PDFsimpluokPas encore d'évaluation
- Calage D'allumageDocument3 pagesCalage D'allumagec2885105Pas encore d'évaluation
- 16vti PDFDocument12 pages16vti PDFAmine BelaidPas encore d'évaluation
- SSP226 Le Moteur V8 TDI 3.3l Conception Et FonctionementDocument36 pagesSSP226 Le Moteur V8 TDI 3.3l Conception Et FonctionementKHALEDTIFPas encore d'évaluation
- Injection Directe Essence PDFDocument7 pagesInjection Directe Essence PDFBa Hamzik HP100% (1)
- Audi A4Document342 pagesAudi A4Kevin Siloret (ZoraX)Pas encore d'évaluation
- 08 - Carbu A MembranesDocument3 pages08 - Carbu A Membranesibrahim rabbajPas encore d'évaluation
- Moteur Diesel: CaractéristiquesDocument11 pagesMoteur Diesel: CaractéristiquesNicolas DuboisPas encore d'évaluation
- TPD1350F4Document374 pagesTPD1350F4Hakim GOURAIAPas encore d'évaluation
- Atlas Copco Compresseurs Rotatifs À Vis Lubrifiées GA11+-30Document20 pagesAtlas Copco Compresseurs Rotatifs À Vis Lubrifiées GA11+-30mahdi100% (1)
- Cours Mécatronique ABSDocument144 pagesCours Mécatronique ABSBrahim Moumou100% (1)
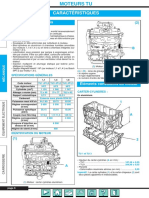
- Moteurs Tu: CaractéristiquesDocument16 pagesMoteurs Tu: CaractéristiquesBruno 9449Pas encore d'évaluation
- Circuit HP HDIDocument31 pagesCircuit HP HDIDoudouPas encore d'évaluation
- Analyse Du Limiteur de Pression PDFDocument8 pagesAnalyse Du Limiteur de Pression PDFfoufouaPas encore d'évaluation
- Shop Manual Honda Hrd536cDocument82 pagesShop Manual Honda Hrd536cpestaliccPas encore d'évaluation
- QP LHM230 3588100Document57 pagesQP LHM230 3588100Ko Gyi Kyaw NandaPas encore d'évaluation
- Les Problemes Turbo Injecteur PDFDocument2 pagesLes Problemes Turbo Injecteur PDFlloretplPas encore d'évaluation
- Cahier Stagiaire FRDocument22 pagesCahier Stagiaire FRDjamzenPas encore d'évaluation
- Allumage Version EleveDocument24 pagesAllumage Version EleveAziz ArrahalPas encore d'évaluation
- Boite Des Vitesses AutomatiqueDocument3 pagesBoite Des Vitesses AutomatiquebrahimessahebyPas encore d'évaluation
- Moteur Diesel Voyager PDFDocument19 pagesMoteur Diesel Voyager PDFAnnie LarrodePas encore d'évaluation
- Abs 2Document8 pagesAbs 2Appia CekaPas encore d'évaluation
- GD02 - Fonction Hydraulique - Tome 2Document58 pagesGD02 - Fonction Hydraulique - Tome 2ait mimounePas encore d'évaluation
- FRDocument18 pagesFRdory7dawPas encore d'évaluation
- Mode InjectionDocument8 pagesMode InjectionhichamPas encore d'évaluation
- Chap2.La Culasse Et La Partie Mobile 1.ppsxDocument29 pagesChap2.La Culasse Et La Partie Mobile 1.ppsxalioui100% (1)
- Hdi Tdi CrdiDocument16 pagesHdi Tdi CrdiJessica PrestonPas encore d'évaluation
- Cours PICDocument26 pagesCours PICDraoui AhmedPas encore d'évaluation
- Vue Éclatée Limex 125 LP-LSDocument2 pagesVue Éclatée Limex 125 LP-LSMohamed SalamPas encore d'évaluation
- K JetronicDocument5 pagesK JetronicElie MezherPas encore d'évaluation
- Vo09 020 024 Moteurs SDocument5 pagesVo09 020 024 Moteurs Sapi-142522448Pas encore d'évaluation
- Monté Sur Moteur HPI 16Document76 pagesMonté Sur Moteur HPI 16Riahi RezegPas encore d'évaluation
- TP2: Conception Schématique D'un Mini-Calculateur: ObjectifDocument4 pagesTP2: Conception Schématique D'un Mini-Calculateur: ObjectifDor SafPas encore d'évaluation
- MrkanfDocument62 pagesMrkanfrabbajPas encore d'évaluation
- Aile Aéroélastique Active: Améliorer la maniabilité des avions à des vitesses transsoniques et supersoniquesD'EverandAile Aéroélastique Active: Améliorer la maniabilité des avions à des vitesses transsoniques et supersoniquesPas encore d'évaluation
- La Peugeot 908 HDi FAP: de Monza 2007 à Road Atlanta 2011D'EverandLa Peugeot 908 HDi FAP: de Monza 2007 à Road Atlanta 2011Pas encore d'évaluation
- 25 11 2021 Cours Hydraulique PneumatiqueDocument11 pages25 11 2021 Cours Hydraulique PneumatiqueRodolphe Sounou100% (1)
- Classement Appareils Et Mecanismes FRDocument2 pagesClassement Appareils Et Mecanismes FRmahdiPas encore d'évaluation
- Fiche Technique de La Cheville Chimique HVU Et Tige HAS Ou Douille HIS-N Fiche Technique ASSET DOC LOC 1923168Document10 pagesFiche Technique de La Cheville Chimique HVU Et Tige HAS Ou Douille HIS-N Fiche Technique ASSET DOC LOC 1923168mahdiPas encore d'évaluation
- P 03065 FRDocument14 pagesP 03065 FRmahdi100% (1)
- C 15406 PRESENTATION DS5 Formateur StagiaireDocument17 pagesC 15406 PRESENTATION DS5 Formateur StagiairemahdiPas encore d'évaluation
- Aide Memoire A1S121Document11 pagesAide Memoire A1S121mahdiPas encore d'évaluation
- C 12232 FR StagiaireDocument57 pagesC 12232 FR StagiairemahdiPas encore d'évaluation
- C 12268 AVR FormateurDocument27 pagesC 12268 AVR FormateurAnonymous jAt0FqHZnPas encore d'évaluation
- C 12266 VTH Formateur StagiaireDocument23 pagesC 12266 VTH Formateur Stagiairemahdi100% (1)
- P 03065 FRDocument14 pagesP 03065 FRmahdi100% (1)
- Aide Memoire A1S121Document11 pagesAide Memoire A1S121mahdiPas encore d'évaluation
- C 12232 FR StagiaireDocument57 pagesC 12232 FR StagiairemahdiPas encore d'évaluation
- Les Compresseurs AlternatifDocument11 pagesLes Compresseurs AlternatifSaNa NaNyPas encore d'évaluation
- Gasgas MC85Document134 pagesGasgas MC85allanPas encore d'évaluation
- H23TX 2420315920 E0202Document275 pagesH23TX 2420315920 E0202MPas encore d'évaluation
- Reglage Jeu Aux SoupapesDocument4 pagesReglage Jeu Aux SoupapesbouazaPas encore d'évaluation
- Manual Turmix y Tomamuestras2.002Document14 pagesManual Turmix y Tomamuestras2.002Azzou SayhiPas encore d'évaluation
- Chapitre 7 - TurbopropulseurDocument5 pagesChapitre 7 - Turbopropulseurislam100% (1)
- SHERCO Se 3.0i-F Owner's ManualDocument146 pagesSHERCO Se 3.0i-F Owner's ManualJair RosaPas encore d'évaluation
- AMDEC: Moteur ThermiqueDocument46 pagesAMDEC: Moteur ThermiqueMed Ali50% (4)
- Fiche Intervention Entretien TriumphDocument2 pagesFiche Intervention Entretien TriumphChems MezzPas encore d'évaluation
- Les Avantages Et InconvénientsDocument4 pagesLes Avantages Et InconvénientsHadjaidjiPas encore d'évaluation
- Catalogue Pieces 403 A3Document379 pagesCatalogue Pieces 403 A3wernerPas encore d'évaluation
- Installation Sur Un Moteur DieselDocument4 pagesInstallation Sur Un Moteur DieselBerny NoussiPas encore d'évaluation
- M.ATELIER AQ205-430-431-432-434 Moteur - Pages.1 20Document20 pagesM.ATELIER AQ205-430-431-432-434 Moteur - Pages.1 20GrosseuvresPas encore d'évaluation
- Manitou MSI (FR)Document8 pagesManitou MSI (FR)Manitou0% (1)
- Maintenance Schedule of PC2-6Document4 pagesMaintenance Schedule of PC2-6Wagner GuimarãesPas encore d'évaluation
- Katalog A110 KomplettDocument185 pagesKatalog A110 KomplettGADET JoelPas encore d'évaluation
- 8517 Mini Projet 50hDocument11 pages8517 Mini Projet 50hHaitamElbathaouiPas encore d'évaluation
- Cadv - Pa - 2019 2Document31 pagesCadv - Pa - 2019 2Ilias ZeamariPas encore d'évaluation
- Porsche Boxster 986 Brochure FRDocument45 pagesPorsche Boxster 986 Brochure FRGeorges MerranPas encore d'évaluation
- Peugeot 206 Essence Et Diesel: Graissage EntretienDocument1 pagePeugeot 206 Essence Et Diesel: Graissage EntretienBen BenPas encore d'évaluation