Vous aimerez peut-être aussi
- Analyse Fonctionnelle FraiseuseDocument5 pagesAnalyse Fonctionnelle FraiseuseTECH NEWS100% (4)
- TP 01.1 Cric Hydraulique Corrigé PDFDocument3 pagesTP 01.1 Cric Hydraulique Corrigé PDFAbdellah FaqdaniPas encore d'évaluation
- Guidage Par Roulement Applications)Document15 pagesGuidage Par Roulement Applications)MIMFS92% (26)
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had33% (3)
- Devoir de Contrôle N°1 Avec Correction - Génie Mécanique - Trottinette Electrique - 3ème Technique (2018-2019) MR JEMAI LotfiDocument9 pagesDevoir de Contrôle N°1 Avec Correction - Génie Mécanique - Trottinette Electrique - 3ème Technique (2018-2019) MR JEMAI LotfiMrnadhir Mecanique100% (4)
- Correction Sujet 4Document9 pagesCorrection Sujet 4Chokri Atef0% (3)
- Embrayage Frein Et ReducteurDocument2 pagesEmbrayage Frein Et ReducteurMohamedBejja92% (13)
- Exercice Limiteur de CoupleDocument4 pagesExercice Limiteur de CoupleMortadha Rabah100% (1)
- TD EmbrayageDocument3 pagesTD Embrayagematozo83% (12)
- Cours EngrenageDocument6 pagesCours EngrenageMohsen LaabidiPas encore d'évaluation
- 8c6rd-Etau de Plombier PDFDocument4 pages8c6rd-Etau de Plombier PDFbecem67% (6)
- Dessin D'ens MotoréducteurDocument2 pagesDessin D'ens Motoréducteurmatozo75% (4)
- Perceuse Sensitive Oyaka Nyemb Nyobe EbolembabgDocument14 pagesPerceuse Sensitive Oyaka Nyemb Nyobe Ebolembabgngouo75% (4)
- TD Compresseur eDocument8 pagesTD Compresseur entayoub100% (2)
- Devoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineDocument8 pagesDevoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineYoussef Cherni100% (1)
- Train ÉpicycloidalDocument3 pagesTrain ÉpicycloidalAhmed Farahidi75% (4)
- Cintreuse Pour ToleDocument25 pagesCintreuse Pour Tolengouo100% (4)
- Unité de Remplissage de BouteillesDocument4 pagesUnité de Remplissage de BouteillesMed Aymen Bensalem0% (1)
- 02-Poupee Mobile CorrigeDocument5 pages02-Poupee Mobile CorrigeElmouden Mustapha75% (8)
- 03 PerceuseDocument8 pages03 Perceusekhocine33% (3)
- T.P 02 (V2) CorrigésDocument4 pagesT.P 02 (V2) CorrigésMrnadhir Mecanique100% (1)
- Analyse Fonctionnelle Interne D'un ProduitDocument5 pagesAnalyse Fonctionnelle Interne D'un ProduitMohsen Laabidi100% (1)
- Corrige Application 1Document2 pagesCorrige Application 1djalikadjou100% (2)
- Dossier TechniqueDocument6 pagesDossier Techniqueمحمد بن موسى الخوارزمي0% (1)
- Guidage en TranslationDocument11 pagesGuidage en TranslationMohamed Slim KHACHROUMI50% (2)
- Systeme Vis Ecrou PDFDocument9 pagesSysteme Vis Ecrou PDFkaka kaladze100% (1)
- TD2 - Accouplement - Correction Inverseur de MarcheDocument6 pagesTD2 - Accouplement - Correction Inverseur de MarcheAbdelkhalek SaidiPas encore d'évaluation
- Sujet12 ANTENNE PARABOLIQUE PDFDocument6 pagesSujet12 ANTENNE PARABOLIQUE PDFmarwen bellili50% (2)
- Éléments de Transmission de MouvementDocument7 pagesÉléments de Transmission de MouvementMohsen Laabidi100% (1)
- Cours - Génie Mécanique - Roues de Friction Variateur de Vitesse - 3ème Technique (2015-2016) MR HAMDOUNI SabeurDocument8 pagesCours - Génie Mécanique - Roues de Friction Variateur de Vitesse - 3ème Technique (2015-2016) MR HAMDOUNI SabeurRouaissi Ridha100% (1)
- Exercices Sur Les Trains ÉpicycloïdauxDocument4 pagesExercices Sur Les Trains Épicycloïdauxwalid100% (9)
- Exemple FastDocument1 pageExemple Fastmejri merinPas encore d'évaluation
- devoir3TM01 2019Document5 pagesdevoir3TM01 2019محمد الأمين عبد الحي75% (4)
- Série Guidage en Rotation PDFDocument7 pagesSérie Guidage en Rotation PDFTaieb BentaherPas encore d'évaluation
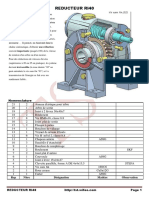
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieDocument6 pagesREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- Exercices Cinmatique Trajectoires Camion Benne Chariot Portuaire CorrigDocument2 pagesExercices Cinmatique Trajectoires Camion Benne Chariot Portuaire Corrigspectrum66100% (3)
- Corrig Examen Technologie de Construction 1GM Iset Nabeul 2009 PDFDocument6 pagesCorrig Examen Technologie de Construction 1GM Iset Nabeul 2009 PDFHanane Tounsi100% (1)
- Embrayages Frein 10 11 12Document7 pagesEmbrayages Frein 10 11 12Heraiz Rachid100% (4)
- Embrayages Frein 10 11 12 PDFDocument7 pagesEmbrayages Frein 10 11 12 PDFmohamed1101100% (1)
- Roulement BCDocument6 pagesRoulement BCntayoub89% (9)
- I. Les Cames:: 1. DefinitionDocument6 pagesI. Les Cames:: 1. DefinitionYassine Hnada0% (1)
- TP 01.1 Cric Hydraulique Corrigé PDFDocument3 pagesTP 01.1 Cric Hydraulique Corrigé PDFAbdellah Faqdani100% (2)
- Maintenance D'une Tour ParallèleDocument47 pagesMaintenance D'une Tour ParallèleLupi100% (7)
- Embrayage FreinDocument5 pagesEmbrayage FreinHicham BaghdadiPas encore d'évaluation
- FONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFDocument18 pagesFONCTION TRANSMETTRE L ÉNERGIE Aspect Technologique (Guidage en Rotation) Reponse Applications PDFBen Fah100% (3)
- 2 Contrôle GéoDocument8 pages2 Contrôle GéoNS ADPas encore d'évaluation
- C Engrenage Vis Ecrou PDFDocument2 pagesC Engrenage Vis Ecrou PDFIbra Moulay100% (2)
- Cours EngrenagesDocument5 pagesCours EngrenagesJesuis ContentPas encore d'évaluation
- TD Train ÉpicycloïdalDocument5 pagesTD Train Épicycloïdalpapouch1350% (2)
- Corr TD 2 Theorie de Mecanisme PDFDocument3 pagesCorr TD 2 Theorie de Mecanisme PDFMélèk BejiPas encore d'évaluation
- EMBRAYAGE - FREINS - App PDFDocument4 pagesEMBRAYAGE - FREINS - App PDFHanane Tounsi88% (8)
- TD Poulie CourroieDocument2 pagesTD Poulie CourroieAbdellah Faqdani100% (2)
- Corrigé Afs2016Document6 pagesCorrigé Afs2016Ibrahim Êl BæzPas encore d'évaluation
- 07 Butee Trainard CorrigeDocument5 pages07 Butee Trainard CorrigeHkiri MohamedPas encore d'évaluation
- Semestre 2 DS 1 2008-2009 Leve Personne OriorDocument8 pagesSemestre 2 DS 1 2008-2009 Leve Personne OriorKhawla BkPas encore d'évaluation
- Boite de VitesseDocument8 pagesBoite de VitesseHamami AymenPas encore d'évaluation
- CameDocument7 pagesCamemasteratsiiPas encore d'évaluation
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
- Cotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsDocument81 pagesCotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsomatrPas encore d'évaluation
- Technique CDocument8 pagesTechnique CKarim FathiPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Correction Devoirdecontrolen2 1as 2019Document2 pagesCorrection Devoirdecontrolen2 1as 2019Med Aymen BensalemPas encore d'évaluation
- 2-Devoir de Controle N1-1AS-2021-FLBDocument2 pages2-Devoir de Controle N1-1AS-2021-FLBMed Aymen BensalemPas encore d'évaluation
- Devoir de Contrôle N°1 (2A) TMDocument4 pagesDevoir de Contrôle N°1 (2A) TMMed Aymen BensalemPas encore d'évaluation
- DS3 LAISONS FL-1AS-Bride+a+machoires - 2015Document5 pagesDS3 LAISONS FL-1AS-Bride+a+machoires - 2015Med Aymen BensalemPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 1ère AS (2002-2003) MR GassoumiDocument4 pagesDevoir de Synthèse N°1 - Technologie - 1ère AS (2002-2003) MR GassoumiMed Aymen BensalemPas encore d'évaluation
- 2A Devoir S1 (TM)Document8 pages2A Devoir S1 (TM)Med Aymen BensalemPas encore d'évaluation
- Devoir SollicitationDocument1 pageDevoir SollicitationMed Aymen BensalemPas encore d'évaluation
- Exercice LiaisonDocument2 pagesExercice LiaisonMed Aymen BensalemPas encore d'évaluation
- Devoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Document6 pagesDevoir de Contrôle N°3 Avec Correction - Génie Mécanique Guidage en Rotation Touret A Meuler - 3ème Technique (2012-2013)Kouchad Fouad89% (9)
- DC 1 Devoir DC G2 CorrectionDocument4 pagesDC 1 Devoir DC G2 CorrectionMed Aymen BensalemPas encore d'évaluation
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemPas encore d'évaluation
- Devoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimDocument7 pagesDevoir de Contrôle N°3 - Technologie - TOUR SEMI-AUTOMATIQUE - 3ème Technique (2015-2016) MR Mnejja SlimMed Aymen Bensalem75% (4)
- Chariot MonorailDocument1 pageChariot MonorailMed Aymen BensalemPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- 07-TD Modelisation Des Liaisons-EDocument5 pages07-TD Modelisation Des Liaisons-EMed Aymen BensalemPas encore d'évaluation
- Représentation Fonctionnelle D'un Système 2012Document5 pagesReprésentation Fonctionnelle D'un Système 2012Med Aymen BensalemPas encore d'évaluation
- Cours Guidage TranslationDocument12 pagesCours Guidage TranslationKali Abdennour0% (1)
- 01-Lecon1 Analyse Fonctionnelle 2012-13Document8 pages01-Lecon1 Analyse Fonctionnelle 2012-13Med Aymen Bensalem100% (1)
- N3 2013 MecanismeDeReglageDeCapteurDocument5 pagesN3 2013 MecanismeDeReglageDeCapteurMed Aymen Bensalem100% (1)
- Devoir de Synthèse N°3 2008 2009 (Soudani Sami)Document4 pagesDevoir de Synthèse N°3 2008 2009 (Soudani Sami)Med Aymen Bensalem100% (2)
- Analyse Fonct InterneDocument9 pagesAnalyse Fonct InterneMed Aymen BensalemPas encore d'évaluation
- Articulation en Porte À Faux PDFDocument1 pageArticulation en Porte À Faux PDFMed Aymen BensalemPas encore d'évaluation
- Devoir de Synthèse N°3 2006 2007 (Soudani Sami)Document3 pagesDevoir de Synthèse N°3 2006 2007 (Soudani Sami)Med Aymen Bensalem100% (2)
- 21 Coupe SectionsDocument13 pages21 Coupe SectionsMed Aymen Bensalem0% (1)
- Devoir de Synthèse N°3 2009 2010 (Soudani Sami)Document4 pagesDevoir de Synthèse N°3 2009 2010 (Soudani Sami)Med Aymen Bensalem100% (1)
- Devoir de Contrôle N°1 2012 2013 (Heni Abdellatif)Document2 pagesDevoir de Contrôle N°1 2012 2013 (Heni Abdellatif)Med Aymen BensalemPas encore d'évaluation
- Devoir de Synthèse N°1 2011-2012Document9 pagesDevoir de Synthèse N°1 2011-2012Med Aymen BensalemPas encore d'évaluation
- 2-Liaisons Et Schématisation (TD)Document8 pages2-Liaisons Et Schématisation (TD)ali saadPas encore d'évaluation
- Ancrages EchafaudageDocument2 pagesAncrages EchafaudageRalf LoPas encore d'évaluation
- GRAFCET 1 Couleur 1 3Document106 pagesGRAFCET 1 Couleur 1 3Chaimaa GhazzaouiPas encore d'évaluation
- 04 Boit Vitess Tour Corrige ÇÇÇÇÇÇÇÇÇÇÇDocument7 pages04 Boit Vitess Tour Corrige ÇÇÇÇÇÇÇÇÇÇÇAbdo LachPas encore d'évaluation
- Schema Cinematique Pour Une BrideDocument6 pagesSchema Cinematique Pour Une BrideNeji Hmani100% (1)
- 07 TorseursDocument12 pages07 TorseursDan CheridanPas encore d'évaluation
- DS 2Document10 pagesDS 2Ttabi VeydiPas encore d'évaluation
- 2-Devoir de Synthése N2-1as-2023-Etau de CentrageDocument5 pages2-Devoir de Synthése N2-1as-2023-Etau de CentrageKarim AmmiPas encore d'évaluation
- Mecanismes ExercicesDocument6 pagesMecanismes ExercicesOumaima BK0% (1)
- Dev Ef FerrureDocument16 pagesDev Ef FerruremohammedPas encore d'évaluation
- TD - Maison Pivotante - v2Document2 pagesTD - Maison Pivotante - v2thibault.turquiPas encore d'évaluation
- Torseur LiaisonsDocument1 pageTorseur LiaisonsAmina Dinari100% (1)
- Liaisons Mécanique2019Document4 pagesLiaisons Mécanique2019Mohsen LaabidiPas encore d'évaluation
- Mmoire 1re Anne Julien Lagnier Ampre v2.0Document56 pagesMmoire 1re Anne Julien Lagnier Ampre v2.0Sliim AmiriPas encore d'évaluation
- Calcul Des ArbresDocument18 pagesCalcul Des Arbresmejri merinPas encore d'évaluation
- Rapport FinalDocument49 pagesRapport FinalSalma Benazzou100% (2)
- Parasismique - Etude D'un PontDocument46 pagesParasismique - Etude D'un PontNicOlas Kaczkowski100% (5)
- TP 20 - Modélisation Et Étude Cinématique (OUVRE PORTAIL AVIDSEN) REDIER CyrilDocument12 pagesTP 20 - Modélisation Et Étude Cinématique (OUVRE PORTAIL AVIDSEN) REDIER CyrilCyril REDIERPas encore d'évaluation
- Correction Du Devoir de Contrôle N°1 - Génie Mécanique Véhicule Électrique - Bac Technique (2010-2011) MR BEN AMAR MABROUKDocument4 pagesCorrection Du Devoir de Contrôle N°1 - Génie Mécanique Véhicule Électrique - Bac Technique (2010-2011) MR BEN AMAR MABROUKNesrine NouiraPas encore d'évaluation
- TD3-2 - CorrectionDocument8 pagesTD3-2 - CorrectionReda BaddyPas encore d'évaluation
- Etude Et Réalisation D'un Bras de Robot À Base de Carte ArduinoDocument103 pagesEtude Et Réalisation D'un Bras de Robot À Base de Carte ArduinoSAHIR Koceila100% (4)
- S Sciences Ingenieur 2017 Metropole Sujet Officiel ExtraireDocument4 pagesS Sciences Ingenieur 2017 Metropole Sujet Officiel ExtraireKaled MRASSIPas encore d'évaluation
- Cours Complet ANACONDA PDFDocument271 pagesCours Complet ANACONDA PDFAstrid JizreelPas encore d'évaluation
- Technologie de Construction 1Document106 pagesTechnologie de Construction 1boukhriss mokhless100% (2)
- 14 Modelisation CinematiqueDocument10 pages14 Modelisation Cinematiquemezziwalid099411Pas encore d'évaluation
- Différentiel Et TransmissionDocument8 pagesDifférentiel Et TransmissionThomas CaurelPas encore d'évaluation
- LiaisonDocument5 pagesLiaisonTarekMostaphaPas encore d'évaluation
- Touret A MeulerDocument15 pagesTouret A MeulerrahmaboufalghaPas encore d'évaluation
- TD 29 Corrigé - Arc-BoutementDocument8 pagesTD 29 Corrigé - Arc-BoutementMohamed AbaakilPas encore d'évaluation
- TD Modélisation - Paramétrage PDFDocument8 pagesTD Modélisation - Paramétrage PDFIsmail BenchelhPas encore d'évaluation