Vous aimerez peut-être aussi
- Cours Infographie 1Document129 pagesCours Infographie 1Saf BesPas encore d'évaluation
- Hydrologie Statistique PDFDocument153 pagesHydrologie Statistique PDFAhlam RA100% (1)
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- Capteurs/actuateurs Auto PDFDocument23 pagesCapteurs/actuateurs Auto PDFyassine89% (9)
- Ex Ef PotenceDocument10 pagesEx Ef PotenceChafik BouguezourPas encore d'évaluation
- Compte Rendu: TP2: Réglage Empirique Du Correcteur PIDDocument9 pagesCompte Rendu: TP2: Réglage Empirique Du Correcteur PIDomar sahamoudiPas encore d'évaluation
- GE2 S4 Système Commande Temps Réel Part1 CM PDFDocument11 pagesGE2 S4 Système Commande Temps Réel Part1 CM PDFEl GhafraouiPas encore d'évaluation
- Document TP Industrie4 - 2023 - VFDocument18 pagesDocument TP Industrie4 - 2023 - VFZineb LamraniPas encore d'évaluation
- Contrôle Continu Sur La Modélisation Énergétique Par Bond-Graphe Et Simulation Des Systèmes Multi-PhysiquesDocument1 pageContrôle Continu Sur La Modélisation Énergétique Par Bond-Graphe Et Simulation Des Systèmes Multi-PhysiquesMohamed Amine ZouhriPas encore d'évaluation
- RApport TPDocument25 pagesRApport TPOumar MandodjoPas encore d'évaluation
- TP Alimentation1Document8 pagesTP Alimentation1loic noumeniPas encore d'évaluation
- ELEC 2753 ElectrotechniqueDocument29 pagesELEC 2753 Electrotechniquerached123100% (1)
- Chapitre2-System AsservisDocument20 pagesChapitre2-System Asservisحسين شنيقي0% (2)
- Cours Sur Les Automates Programmables Industriels: LTA-Laboratoire D'automatismesDocument39 pagesCours Sur Les Automates Programmables Industriels: LTA-Laboratoire D'automatismesExode Christ GuiellePas encore d'évaluation
- LabviewDocument19 pagesLabviewtortorouPas encore d'évaluation
- Null 2Document37 pagesNull 2Youssef ElBazPas encore d'évaluation
- Stage D'initiationDocument19 pagesStage D'initiationAfifa JridiPas encore d'évaluation
- Fiche Resume 5 MCCDocument4 pagesFiche Resume 5 MCCBENSALAH AminaPas encore d'évaluation
- tp1 - Prise en Main de Lemulateur Emu8086 Et ArchitectureDocument2 pagestp1 - Prise en Main de Lemulateur Emu8086 Et Architecturewalid kahlounPas encore d'évaluation
- TPN 2Document3 pagesTPN 2kololoPas encore d'évaluation
- Concours Blanc ENSAS Electricité Electronique Electromagnetisme 2021Document4 pagesConcours Blanc ENSAS Electricité Electronique Electromagnetisme 2021HiibaPas encore d'évaluation
- Regulation de La Vitesse DDocument8 pagesRegulation de La Vitesse Dbadre989100% (2)
- TD-Alternatif Et PuissanceDocument24 pagesTD-Alternatif Et PuissanceBakr IbrahimiPas encore d'évaluation
- Concours LP 2017-2018 PDFDocument8 pagesConcours LP 2017-2018 PDFNZ SaadPas encore d'évaluation
- TP AutomatiqueDocument63 pagesTP AutomatiqueNabil BounouPas encore d'évaluation
- Commande PID D'un Moteur À Courant ContinuDocument54 pagesCommande PID D'un Moteur À Courant ContinuMehdi Abid100% (1)
- Série TDS ComplementDocument13 pagesSérie TDS ComplementEA BeatszPas encore d'évaluation
- 477 PDFDocument90 pages477 PDFannouar minatoPas encore d'évaluation
- Examen PDFDocument3 pagesExamen PDFAmina NouriPas encore d'évaluation
- Demarreur Progressif Gradateur Angle de Phase PDFDocument3 pagesDemarreur Progressif Gradateur Angle de Phase PDFHous SamPas encore d'évaluation
- Le Registre de Configuration Et Le WatchDogDocument2 pagesLe Registre de Configuration Et Le WatchDogashraf hmidaniPas encore d'évaluation
- TP Labview 01: Acquisition D'Une GrandeurDocument4 pagesTP Labview 01: Acquisition D'Une GrandeurfatihaPas encore d'évaluation
- TD1 OnduleursDocument2 pagesTD1 OnduleurssofianePas encore d'évaluation
- TP Modélisation Et Simulation Des Moteurs AsynchronesDocument2 pagesTP Modélisation Et Simulation Des Moteurs AsynchronesSaad BenyahiaPas encore d'évaluation
- MpapDocument1 pageMpaplcomPas encore d'évaluation
- Exo BoucherotMonophase 06Document1 pageExo BoucherotMonophase 06AsmrHani Zaza100% (1)
- Injection Au réseau-STAGEDocument84 pagesInjection Au réseau-STAGEHasnae SegaouiPas encore d'évaluation
- Exm2 CapDocument4 pagesExm2 CapKiadam KitouPas encore d'évaluation
- Copie de E.M.D. de Protection Des Systèmes Énergétiques LICENCE Septembre 2020Document2 pagesCopie de E.M.D. de Protection Des Systèmes Énergétiques LICENCE Septembre 2020Manino Rafik100% (1)
- Compte Rendu ElectriciteDocument6 pagesCompte Rendu ElectriciteKHALIL MRIZIKPas encore d'évaluation
- TP Arithmétique Binaire (TP N°1)Document2 pagesTP Arithmétique Binaire (TP N°1)abir saal100% (1)
- Compte Rendu Du TP3-Systéme AsservisDocument9 pagesCompte Rendu Du TP3-Systéme AsservisoumarPas encore d'évaluation
- 727 PDFDocument93 pages727 PDFBachir BchiriPas encore d'évaluation
- SujetDocument24 pagesSujetAyman LamzouriPas encore d'évaluation
- TD N°2 - Modélisation de La MASDocument7 pagesTD N°2 - Modélisation de La MASYoucef BistoPas encore d'évaluation
- ChapB15 Théorème de ShannonDocument2 pagesChapB15 Théorème de ShannonvarnicePas encore d'évaluation
- TD 02Document4 pagesTD 02KanoPas encore d'évaluation
- Filtre Pass BasDocument12 pagesFiltre Pass Basdettlaff xxxPas encore d'évaluation
- TP Electronique de PuissanceDocument15 pagesTP Electronique de PuissanceEd-dahmani ChafikPas encore d'évaluation
- Systemes Dans L'espace D'etatDocument47 pagesSystemes Dans L'espace D'etatsihamab371Pas encore d'évaluation
- TP 2 CommandeDocument3 pagesTP 2 CommandeMohamed AminePas encore d'évaluation
- Examen de Fin de Formation (Travaux Pratique)Document5 pagesExamen de Fin de Formation (Travaux Pratique)Ecouter le françaisPas encore d'évaluation
- Gradateur MonoDocument9 pagesGradateur MonoOmar 95Pas encore d'évaluation
- TD3 Machine Asynchrone BISDocument2 pagesTD3 Machine Asynchrone BISnawzat100% (1)
- Etude Et Réalisation D'un Onduleur de Tension Triphasé À MLIDocument59 pagesEtude Et Réalisation D'un Onduleur de Tension Triphasé À MLIzouhair qobiPas encore d'évaluation
- 5 Appinventor Recept BluetoothDocument5 pages5 Appinventor Recept BluetoothCalla Fritz100% (1)
- Chapitre 4 Communication en SupervisionDocument7 pagesChapitre 4 Communication en SupervisionJunior Issongui100% (1)
- TD 2 - Moteurs Asynchrone TriphaséDocument4 pagesTD 2 - Moteurs Asynchrone TriphaséEsperance TchibindaPas encore d'évaluation
- Eva9 Grafcet Et ApiDocument6 pagesEva9 Grafcet Et ApiEdmond OuattaraPas encore d'évaluation
- Expose Robot Suiveur de LigneDocument22 pagesExpose Robot Suiveur de LigneAchraf AlaouiPas encore d'évaluation
- TP - Outil de Simulation MATLABDocument17 pagesTP - Outil de Simulation MATLABRaphael RAKOTOARIVELOPas encore d'évaluation
- Tavaux DirigésDocument2 pagesTavaux DirigésHakimAgüeroPas encore d'évaluation
- Naitali-EIGE452 - TD BG Système de Suspension PDFDocument3 pagesNaitali-EIGE452 - TD BG Système de Suspension PDFEl Ghafraoui100% (1)
- Simulation de Scanning de Fichier 2020-04-27Document1 pageSimulation de Scanning de Fichier 2020-04-27El GhafraouiPas encore d'évaluation
- 2FI 15-16 RatDocument4 pages2FI 15-16 RatEl GhafraouiPas encore d'évaluation
- Présentation - Commande Optimale 2FIGE 2019-2020 - Version 2Document25 pagesPrésentation - Commande Optimale 2FIGE 2019-2020 - Version 2El GhafraouiPas encore d'évaluation
- Mini Projets DSP 2019-20Document4 pagesMini Projets DSP 2019-20El Ghafraoui100% (1)
- Rappels MCC Et Hacheur ProfsDocument13 pagesRappels MCC Et Hacheur ProfsEl Ghafraoui100% (1)
- Support Cours DSP GE2 ENSET 2019-20 PDFDocument54 pagesSupport Cours DSP GE2 ENSET 2019-20 PDFEl Ghafraoui100% (2)
- International Business Machines Corporation: Proposé ParDocument15 pagesInternational Business Machines Corporation: Proposé ParEl GhafraouiPas encore d'évaluation
- 2FI 16-17 RatDocument3 pages2FI 16-17 RatEl GhafraouiPas encore d'évaluation
- 2FI 16-17 ExamenDocument4 pages2FI 16-17 ExamenEl GhafraouiPas encore d'évaluation
- Naitali-EIGE452-Correction TD BG Système de Suspension-1èrePartie (1) .PpsDocument30 pagesNaitali-EIGE452-Correction TD BG Système de Suspension-1èrePartie (1) .PpsEl GhafraouiPas encore d'évaluation
- Img 20161203 0003Document2 pagesImg 20161203 0003El GhafraouiPas encore d'évaluation
- Rapport Identifecation NaitaliDocument11 pagesRapport Identifecation NaitaliEl GhafraouiPas encore d'évaluation
- Naitali-EIGE452 - TD BG Système de Suspension PDFDocument3 pagesNaitali-EIGE452 - TD BG Système de Suspension PDFEl Ghafraoui100% (1)
- TD - Devoir Observateur D'état Pour Un Processus de Traitement de Minerais (34707) PDFDocument3 pagesTD - Devoir Observateur D'état Pour Un Processus de Traitement de Minerais (34707) PDFEl GhafraouiPas encore d'évaluation
- 06 GrafcetDocument42 pages06 GrafcetEl GhafraouiPas encore d'évaluation
- Support Cours DSP GE2 ENSET 2019-20 PDFDocument54 pagesSupport Cours DSP GE2 ENSET 2019-20 PDFEl Ghafraoui100% (2)
- Resume D AutomatiqueDocument17 pagesResume D AutomatiqueEl GhafraouiPas encore d'évaluation
- Etude Du Rssi Pour L Estimation de La Distance Dans Les Reseaux de Capteurs Sans FilDocument59 pagesEtude Du Rssi Pour L Estimation de La Distance Dans Les Reseaux de Capteurs Sans FilEl Ghafraoui100% (1)
- TND Modu 2008 V4Document48 pagesTND Modu 2008 V4El GhafraouiPas encore d'évaluation
- CC Commnum - Décembre 2018-ConvertiDocument4 pagesCC Commnum - Décembre 2018-ConvertiEl GhafraouiPas encore d'évaluation
- Exercice Chapitre4 6 PDFDocument3 pagesExercice Chapitre4 6 PDFEl GhafraouiPas encore d'évaluation
- C4 CdmaDocument20 pagesC4 CdmaF Nass BenPas encore d'évaluation
- Serie MichelsonDocument8 pagesSerie MichelsonMD HM BCPas encore d'évaluation
- TP Api IiDocument11 pagesTP Api IiAdem AounPas encore d'évaluation
- Tp1 BI-PythonDocument3 pagesTp1 BI-PythonHiba AmaraPas encore d'évaluation
- Détection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFDocument27 pagesDétection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFminiya1703Pas encore d'évaluation
- TP SemaphoresDocument2 pagesTP Semaphoresعضوش محمدPas encore d'évaluation
- Scomazzon Pasal SMZ926Document225 pagesScomazzon Pasal SMZ926hiriPas encore d'évaluation
- Poinçonnement: LIM SovanvichetDocument13 pagesPoinçonnement: LIM SovanvichetPhal KhemraPas encore d'évaluation
- KD455.50 Préconisations Montage Démontage - FRDocument7 pagesKD455.50 Préconisations Montage Démontage - FReric pineauPas encore d'évaluation
- cryptographie ٠٩٤٠٤٦Document67 pagescryptographie ٠٩٤٠٤٦Amina BenhassinePas encore d'évaluation
- MedafDocument42 pagesMedafYesmine JasminePas encore d'évaluation
- Fiche JavascriptDocument5 pagesFiche JavascriptA'ch RéfPas encore d'évaluation
- Doctorat BelhouchetDocument184 pagesDoctorat Belhouchetfootball goalPas encore d'évaluation
- 06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Document1 page06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Ghilles PoloPas encore d'évaluation
- Centrale, 2011, MP, Math Ematiques 1Document9 pagesCentrale, 2011, MP, Math Ematiques 1Max tekouPas encore d'évaluation
- Maths 4-TD2Document3 pagesMaths 4-TD2bmessaad1970Pas encore d'évaluation
- Bimetre Sage Attic PDFDocument8 pagesBimetre Sage Attic PDFsarraPas encore d'évaluation
- l3 tm1 Chapitre1 Lecon 01Document10 pagesl3 tm1 Chapitre1 Lecon 01Fatima LagnaouiPas encore d'évaluation
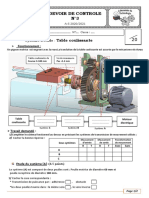
- Devoir de Controle N°3: Table CoulissanteDocument2 pagesDevoir de Controle N°3: Table CoulissanteTarekMostapha100% (1)
- Exercice 1Document2 pagesExercice 1Nour elhoudaPas encore d'évaluation
- TD RefrigerateurDocument4 pagesTD RefrigerateurAmine BenjamiaPas encore d'évaluation
- Concours General Mathematiques 2002 SujetDocument5 pagesConcours General Mathematiques 2002 SujetkkstanPas encore d'évaluation
- PP2 Cor MathDocument69 pagesPP2 Cor MathtotoPas encore d'évaluation
- Cours - Pic 16f628a PDFDocument11 pagesCours - Pic 16f628a PDFridofoxPas encore d'évaluation
- Commandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeDocument159 pagesCommandes Non Lineaires D'Un Redresseur PWM Triphase: ThemeSofiane ZozoPas encore d'évaluation
- Le But de Cette Épreuve Est de Déterminer Si Un Seul Feutre Effaceur Suffit Pour Effacer Le Contenu D'une Petite Cartouche D'encre BleueDocument4 pagesLe But de Cette Épreuve Est de Déterminer Si Un Seul Feutre Effaceur Suffit Pour Effacer Le Contenu D'une Petite Cartouche D'encre BleuePrescillia DieziaPas encore d'évaluation