Cours 09 - Introduction à la Mécanique du Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
Introduction à la Mécanique du Solide
Exemple de Système Complexe
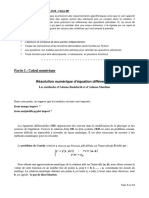
ENSEMBLE TRANSMISSION DE PUISSANCE DE L’HELICOPTERE ECUREUIL
Repère Composants
1 Boite de Transfert Principale (BTP)
2 Platine de suspension BTP
3 Anneau de liaison
4 Trompette de liaison
5 Plots support moteur
6 Carter de liaison moteur trompette
7 Moteur
7’ Equipements moteur
8 Barre de suspension BTP
9 Plancher mécanique
Un système mécanique est généralement constitué d’un ensemble de mécanismes. Ces
mécanismes sont composés de solides reliés entre eux par des liaisons dans le but de réaliser
une fonction.
Exemple : Dans le cas d’un ensemble de transmission de puissance d’un hélicoptère, deux
composants principaux interviennent à la suite du moteur :
La boîte de transmission principale (BTP) située sous le rotor principal et proche du
moteur qui doit transmettre la puissance du moteur au rotor principal et aux divers
équipements.
La boîte de transmission arrière (BTA) située à l’extrémité de la queue de l’appareil qui
fournit la puissance du moteur au rotor arrière.
Florestan MATHURIN Page 1 sur 9
Cours 09 - Introduction à la Mécanique du Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
La puissance moteur est transmise à ces deux systèmes mécaniques par l’intermédiaire de
deux arbres de transmission mécaniquement liés afin d’assurer une liaison cinématique
(1)
Sur l’exemple du permanente entre les deux rotors. La transmission comporte par ailleurs une roue libre afin
système de
transmission de
d’autoriser l’auto giration des rotors en cas de blocage moteur.
puissance de
l’hélicoptère, c’est Les fonctions techniques réalisées par les systèmes mécaniques se caractérisent le plus
bien le cas puisqu’on
souvent par une ou des lois d’entrée sortie en termes de vitesses ou d’efforts (1). En SII, la
s’aperçoit que la
plupart des solutions mécanique du solide a notamment pour objet l'étude des lois du mouvement ou d’équilibre
techniques de ces systèmes et l’ingénieur a donc pour objectif de comprendre, d’analyser, d’améliorer ou
concernent valider les systèmes mécaniques constituant les produits industriels.
l’adaptation de la
vitesse de rotation ou
la transmission du 1 - RAPPEL DE LA DEMARCHE INGENIEUR EN CPGE
couple.
L’objectif de l’ingénieur est d’analyser, améliorer, concevoir ou valider un mécanisme réel.
Pour cela, il faut d’abord le modéliser afin de pouvoir lui appliquer ensuite les outils issus de la
mécanique du solide.
Le choix du modèle dépend :
Domaine Physique (réel) de l’étude que l’on cherche à
Comportement du mécanisme mener,
réel du degré de précision demandé
Objectif d’étude
pour cette étude,
Modélisation des moyens de calcul disponibles.
Validation
Domaine de simulation Le domaine de validité des lois de la
mécanique implique la mise en place
Simulation sur le modèle d’hypothèses simplificatrices lors de
Simulation du comportement du mécanisme
la phase de modélisation.
Plus le modèle est proche du système
Outils de la mécanique réel, plus les résultats obtenus seront
satisfaisants.
2 - HYPOTHESES FONDAMENTALES
On se place dans un système de référence constitué du temps et d’un espace physique.
(2)
unité du Système
International : la
Le temps (t) permet de repérer tout instant par la
Instant = point du repère (1) (2)
seconde (s) date (2).
0 t1 t2 t
(3) (3) Date = abscisse de l’instant
unité du Système L’espace physique est associé à un espace affine
International : le euclidien de dimension 3 dans lequel on définit :
z
mètre (m)
- O : un point de pris comme origine,
Base : ( x , y , z )
- E : espace vectoriel réel associé à muni d’une
Repère : R(O, x , y , z )
base b orthonormée directe (sauf mention
contraire explicitement rarissime), O
- R(O, b) : un repère de l’espace .
x
y
Le système de référence défini peut être aussi appelé espace-temps, référentiel, observateur
ou simplement repère.
Florestan MATHURIN Page 2 sur 9
Cours 09 - Introduction à la Mécanique du Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
(4)
On se limitera par On considère que les pièces mécaniques peuvent être
la suite à appeler modélisées par des solides indéformables (4). A
« solide » un solide
B
indéformable.
Un solide est dit indéformable lorsque, quels que soient les
points A et B de ce solide, la distance AB reste constante au
cours du mouvement.
A et B (S), t , AB =cte
Comme le solide est considéré comme indéformable et que la position relative des axes d’un
repère est invariante au cours du temps, on peut considérer qu’il y a équivalence entre le
solide et son repère associé.
3 - PARAMETRAGE DE LA POSITION D’UN SOLIDE PAR RAPPORT A UN REPERE
Pour définir la position d’un solide (S) par rapport à un
repère R(O, x , y , z ), il faut d’abord commencer par lier à zs
ce solide un repère Rs(O, x s , y s , zs ) et ensuite définir la S
Os
ys
position du repère Rs par rapport au repère R.
xs
Le repère Rs étant caractérisée par son origine Os et sa
base ( x s , y s , zs ), il faut d’abord définir la position de
y
z
l’origine Os dans R puis l’orientation de la base ( x s , y s , zs )
x
de Rs par rapport à la base ( x , y , z ) de R. O
3.1. Paramétrage de la position de Os dans R
On utilise usuellement 3 types de coordonnées pour définir la position de Os dans le repère R :
Les coordonnées cartésiennes Les coordonnées cylindriques Les coordonnées sphériques
z
z
z w
z z x
Os Os r Os
O O v
x O y
y
y
x r
x
x
y
u
u
3.2. Paramétrage de la base de Rs par rapport à la base de R
Il existe d’autres solutions mais on utilise dans le cas général un paramétrage par les angles
d’Euler. Ils correspondent à trois rotations planes successives qui permettent de faire
coïncider la base ( x , y , z ) avec la base ( x s , y s , zs ).
z2 = zs
z = z1 La première rotation est une rotation d’angle
autour de l’axe (O, z ), est appelé angle de
ys
précession. Elle permet de passer de la base ( x , y , z )
x
y2 vers une base intermédiaire ( x 1 , y 1 , z ).
O x
y1 La deuxième rotation est une rotation d’angle
x x
autour de l’axe (O, x1 ), est appelé angle de nutation.
x1 = x2
y Elle permet de passer de la base ( x 1 , y 1 , z ) vers une
xs
seconde base intermédiaire ( x 1 , y 2 , z2 ).
Florestan MATHURIN Page 3 sur 9
Cours 09 - Introduction à la Mécanique du Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
La troisième rotation est une rotation d’angle autour de l’axe (O, z2 ), est appelé angle de
rotation propre. Elle permet de passer de la base ( x 1 , y 2 , z2 ) vers la base ( x s , y s , zs ).
Les figures planes (ou géométrales) sont très utiles pour la résolution des problèmes, elles
permettent
de poser dans un plan toutes les rotations.
y1
y
z1 ys
y2
z2
x1
xs
y2
x y1
x2
z = z1
x1 = x2 z2 = zs
4 - INTRODUCTION AUX LIAISONS : SURFACES ELEMENTAIRES ET HYPOTHESES
(5)
Ces 6 Degrés de Dans l’espace, un solide possède 6 Degrés De Liberté (5), Il faut 6 paramètres pour positionner
Liberté (DDLs) sont les
3 translations : Tx, Ty, un solide dans l’espace :
y
z Ry
Tz et les 3 rotations
autour de O : Rx, Ry, - 3 paramètres permettant de positionner Rz Rx
x
R z. Tz Ty
un point du solide (homogènes à une
longueur)
Tx
O
- 3 paramètres angulaires permettant de
définir l’orientation du solide (homogène à
une mesure angulaire)
Les liaisons permettent de supprimer un certain nombre de degrés de liberté pour réaliser
une fonction. Les différentes liaisons simples s’effectuent à partir de surfaces élémentaires :
(6)
obtenu
généralement par des
procédés de Le cylindre de révolution (6)
fabrication comme le Modèle : cylindricité parfaite (circularité du profil et rectitude),
tournage, le fraisage état de surface parfait, diamètre et longueur sans tolérance
ou le perçage.
(7)
obtenu
généralement par des Le plan (7)
procédés de Modèle : planéité, rugosité et dimensions parfaites
fabrication comme le
lamage, le fraisage ou
le tournage.
(8)
obtenu La sphère (8)
généralement par Modèle : rugosité, dimensions parfaites
tournage.
Les modèles de liaison sont généralement basés sur 2 hypothèses :
Hypothèse 1 : géométrie parfaite Hypothèse 2 : liaison sans jeu
Réel Modèle Réel Modèle
Florestan MATHURIN Page 4 sur 9
Cours 09 - Introduction à la Mécanique du Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
4.1. Liaisons simples (Association de surfaces élémentaires)
L’association de deux surfaces élémentaires d’un solide (2) et d’un solide (1) permet de
contraindre les mouvements de (2)/(1). On les appelle les liaisons simples. On peut les
Toutes les liaisons caractériser par les degrés de libertés supprimés ou par les paramètres cinématiques
simples sont à nécessaires pour positionner (2)/(1).
connaître par
cœur ! D’ailleurs
la page entière
z
z
z (2)/(1) : Liaison sphère/plan ou
est à connaître
(2) Symbole
ponctuelle en O de normale (O, z )
par cœur :/ (2)
Rz (2)
(1)
(1) y
Rx O On supprime 1 DDL : Tz
Ry (1)
O O
Tx
x
y Il reste 5 paramètres cinématiques
Ty 3D 2D
z
z
z
z (2)/(1) : Liaison linéaire rectiligne
Rz (2) d’axe (O, x ) de normale (0, z )
Symbole (2) (2) (2)
(1)
Rx O On supprime 2 DDLs : Tz Ry
Tx O
Ty
(1) O (1) y
x
(1)
Il reste 4 paramètres cinématiques
x
x
y y
3D 2D
z (2)/(1) : Liaison sphère/cylindre
z
z z
Rz
ou linéaire annulaire d’axe (O, x )
Symbole
(2) (2) O (2)
(1) (2) O x
Rx O O
On supprime 2 DDLs : Ty Tz
Ry
y
Tx y (1)
x (1) Il reste 4 paramètres cinématiques
x
y (1)
3D 2D
z
z
z
(2)/(1) : Liaison appui plan de
Symbole normale (O, z )
Rz (2)
(2) (2)
(1)
On supprime 3 DDLs : Tz Rx Ry
O y
O
O
x (1)
Tx
x
y (1)
y
Il reste 3 paramètres cinématiques
Ty 3D 2D
z
(2)/(1) : Liaison sphère/sphère ou
z
z rotule en O
Rz Symbole
(2) (2)
O O
Rx O On supprime 3 DDLs : Tx Ty Tz
(2) Ry
y
x y
x
(1) (1) Il reste 3 paramètres cinématiques
(1) y
3D 2D
z (2)/(1) : Liaison pivot glissant
z
z
z d’axe (O, x )
(2) Symbole
O (2)
(1) O (2) O
x On supprime 4 DDLs : Ty Tz Ry Rz
Tx O
Rx (2)
y
x y (1)
x
y (1) (1) Il reste 2 paramètres cinématiques
3D 2D
Florestan MATHURIN Page 5 sur 9
Cours 09 - Introduction à la Mécanique du Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
4.2. Liaisons composées (à un degré de liberté)
La combinaison en parallèle des liaisons simples permet d’accéder à des liaisons composées.
De même toutes les L1
(2)/(1) : Liaison pivot d’axe (O, x1 )
z L2
liaisons composées 1 2
sont à connaître par (2) (1) Ln
cœur ! La page A B On supprime 5 DDLs : Tx Ty Tz Ry Rz
Rx
entière est donc
Léquivalente
aussi à connaître par 1 2
x y Il reste 1 paramètre cinématique
cœur :/ (1)
z (1)
z1 = z
Symbole 3D Définition du paramètre :
(2)
A (2) O
Rx B
= x,2/1 = (y1 , y2 ) = (z1 , z2 )
y z1
x1 = x
x (1) (1)
y1 = y
z2
y2
2D
z
z
z
B
O O (2)
O x1
A (2)
x
Rx y1
avec x 1 = x 2
(1)
y
x (1)
y (2) (1) (1)
L1
(2)/(1) : Liaison glissière d’axe (O, x1 )
z L2
1 2
Ln
O
(1)
Tx On supprime 5 degrés de liberté :
(2)
y 1 Léquivalente
2 Ty Tz Rx Ry Rz
x
z1 = z Il reste 1 paramètre cinématique
(1) Symbole
3D
(2)
O
(1) Définition du paramètre :
z
x1 = x
y1 = y
y1 y2
(2) (1)
z
2D z
= x,2/1
Tx O (1) O O (2)
x x1 x2
x
y
(2)
y O z1
(1) (1) z2
Définition des paramètres : (2)/(1) : Liaison hélicoïdale d’axe
(O, x1 )
Symbole z1 z1
z2
(2)
3D O
Tx y2 On supprime 4 degrés de liberté :
y1 Ty Tz Ry Rz + 1 relation de
x1
2/1 y
(1)
O x1 1 dépendance entre Tx et Rx
2D z
y1 y2 Il reste 1 paramètre cinématique
O O (2)
x
indépendant
2/1
(2)
y
(1) (1)
x1
x2 Relation de dépendance :
2/1= 2/1.pas/(2) pour un filet à
z2 droite
O z1
Florestan MATHURIN Page 6 sur 9
Cours 09 - Introduction à la Mécanique du Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
5 - AGENCEMENT DES LIAISONS ET PARAMETRAGE : INTRODUCTION
L’ensemble des liaisons dans un mécanisme permet d’établir des relations entre les différents
paramètres cinématiques définis précédemment. On distingue deux grandes familles
(9) d’agencement des liaisons :
Dans ce cas, la
relation demandée 5.1. Les chaînes cinématiques ouvertes 5.2. Les chaînes cinématiques fermées
(9)
concerne souvent un Type bras de manipulation Type mécanismes de transformation de
point en bout de mouvements(10)
chaine.
(10)
Dans ce cas, la Exemple d’une nacelle élévatrice Exemple d’un micromoteur de modélisme
relation demandée
concerne souvent la
Système réel
y
x2 S2 Système réel
loi d’entrée/sortie du
mécanisme.
z
S1 S3
S0 considéré S1
O
comme fixe S2
y
x
S0
z
Modèle
Graphe des liaisons
Pivot d’axe S1 Pivot d’axe
x
(O, x )
(A, x )
Modèle S0 Boucle S2
Graphe des liaisons
Pivot d’axe
Pivot d’axe Glissière d’axe Pivot glissant
S3 (B, x )
(O, y )
(A, x 2 ) d’axe (C, y )
S0 S1 S2
y
x2
Schéma cinématique
S2 Schéma C S0
S1 cinématique
A
S3 B
z
S0
S2
O O
y
S1 A
x
x z
S0
5.3. Le schéma cinématique minimal
L’outil de schématisation permettant de visualiser les différents mouvements dans le
mécanisme étudié ainsi que le paramétrage est le schéma cinématique minimal.
Florestan MATHURIN Page 7 sur 9
Cours 09 - Introduction à la Mécanique du Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
(11)
Il serait en effet L’élaboration d’un schéma cinématique minimal s’appuie sur la démarche suivante :
inutile et fastidieux de
considérer
individuellement On identifie tous les regroupements possibles de pièces (11) : Classes d’Equivalence
toutes les pièces sans Cinématiques (CEC).
commencer par
regrouper celles qui
sont liées (sans
mouvement relatif).
Entre chaque CEC, on s’interroge sur la nature des mouvements entre CEC puis on
(12)
Deux questions à identifie le modèle de liaison correspondant au mieux aux mouvements entre les CEC
ce stade sont utiles :
concernées (12).
- Quelle est la nature
Rappel : les liaisons normalisées utilisées à ce stade sont construites avec les hypothèses : géométrie des
des surfaces en
surfaces parfaite et liaison sans jeu.
contact entre les
solides ?
- Quels sont les
mouvements relatifs
possibles entre les
Eventuellement on s’appuie sur le graphe des liaisons pour définir chaque liaison(13).
solides ?
(13)
Le graphe des
liaisons peut s’avérer
un outil intéressant :
- pour aider à définir On élabore le schéma cinématique minimal en s’appuyant sur le graphe des liaisons
correctement chaque (définition géométrique) et sur les représentations normalisées des différents composants
liaison (définition technologiques (engrenages, roues de friction, …) (14)
géométrique)
- pour aider à
conduire une étude
dynamique ou
statique
(identification des A partir du schéma cinématique, on peut A partir du schéma cinématique, on
actions mécaniques, définir les mobilités du mécanisme ainsi peut définir les paramètres
démarche que les degrés de liaison surabondants. cinématiques (si c’est demandé bien
d’isolement) sûr !!)
(14)
Lorsque l’on Mobilité interne mi : nombre de
demande d’élaborer paramètres cinématiques ne participant Ils sont donnés algébriquement
un schéma pas au mouvement du système. Ex : Liaison pivot d’axe
cinématique, le (O, x 1 ) et de paramètre
paramétrage est
souvent déjà défini
Mobilité utile mu : nombre de
z1
dans l’énoncé. Ces paramètres cinématiques indépendants.
z2
données peuvent y2
constituer une aide
parfois précieuse ! y
O x1 1
5.4. Détermination des paramètres cinématiques
z
Tz Pour définir la position du solide (2)/(1) , on retrouve
deux types de paramètres :
Rz le paramètre de translation (par exemple )
Rx O le paramètre de rotation (par exemple )
Tx Ty Ils sont donnés algébriquement.
Ry
x
y
Il est indispensable de représenter ces paramètres sur des figures
géométrales !
Florestan MATHURIN Page 8 sur 9
Cours 09 - Introduction à la Mécanique du Solide Lycée Fermat Toulouse - CPGE MPSI/PCSI
x1 Méthode de construction d’une figure plane
(1) (2)
O
z1
y1
z2 2
Sur l’exemple, il s’agit d’une liaison
(15)
Il est conseillé de pivot d’axe (O, y1 )
toujours représenter On identifie l’axe de la liaison(15)
y1
cet axe venant vers
vous
Sur l’exemple, on trace le repère 1 et l’axe
y1 venant vers nous, x1 et z1 sont forcement
On trace le repère de référence(16)
positionnés comme sur la figure (sens
(16)
Il est IMPERATIF direct)
que le repère ainsi x 1
tracé soit orthonormé
direct
3/ On identifie le paramètre
angulaire (de quel axe part il ?
sur quel axe arrive t’il ?) et on y1
z1
trace l’autre repère
x1
x2 2
Sur l’exemple, on ne se soucie pas de la valeur de l’angle z2
représenté sur le schéma en perspective de la liaison
(négatif ici). On représente cet angle indépendamment 2
(17)
Il est IMPERATIF
que le paramètre de sa valeur et de son signe(17).
y1 = y2
z1
angulaire soit
représenté dans le
premier cadran
5.5. Exemple : schématisation et paramétrage d’une nacelle élévatrice
compris entre 0 et x2 Modèle x2
/2 S2 Réel S2 2- Schéma
z cinématique
S0 Pivot d’axe
S1 A S1
(O, y )
S1
Glissière z
S0 considéré d’axe (A, x 2 )
O S2
comme fixe
y
Le système est une 1- Graphe des liaisons O
chaine cinématique y
ouverte et il est défini
x
cinématiquement
x
x2 z2
avec 2 paramètres S0
indépendants et .
S2 P
Si rien n’est précisé 3- Schéma
dans l’énoncé, les 4- Figures géométrales S1
paramètres sont
cinématique plan
algébriques. Les angles
x1
y1
y2
A
x
sont alors définis sur
les figures 2D positifs z
z1 x1
dans le premier
cadran (entre 0 et
z1
x1 x2
y
/2). C’est le cas ici
x
pour le paramètre. z
z1 z2
y1 = y S0 O
Florestan MATHURIN Page 9 sur 9
Vous aimerez peut-être aussi
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (7)
- CLT Manual-Bois Lamellé CroiséDocument86 pagesCLT Manual-Bois Lamellé Croisémihaidelian100% (2)
- (PDF) CEREMA - Eurocode 7 - Application Aux Murs - NF P94-281 - CompressDocument63 pages(PDF) CEREMA - Eurocode 7 - Application Aux Murs - NF P94-281 - CompressAichaa DramePas encore d'évaluation
- Exercices 1Document8 pagesExercices 1Bekraoui Keltoum100% (1)
- Cours Electrocinetique 2022Document126 pagesCours Electrocinetique 2022Abdou HajjajiPas encore d'évaluation
- ThermoDocument127 pagesThermoridhajamel100% (2)
- Polycopié Thermodynamique IAP 2012 (Réparé)Document83 pagesPolycopié Thermodynamique IAP 2012 (Réparé)noured547244100% (1)
- Rapport BP Final 4Document71 pagesRapport BP Final 4Med Aziz Ben AMORPas encore d'évaluation
- MDSDocument247 pagesMDSgeotecnhniquePas encore d'évaluation
- Cours MQ 2016-2017 Definitive - PR BENABICHA PDFDocument83 pagesCours MQ 2016-2017 Definitive - PR BENABICHA PDFSoukainaPas encore d'évaluation
- Memoire de Fin de FormationDocument150 pagesMemoire de Fin de Formationlebobo18100% (2)
- CNC 2001 MP Physique 1 CorrigeDocument11 pagesCNC 2001 MP Physique 1 CorrigeAbderrahman SrailPas encore d'évaluation
- CNC 2014 Physique-1 TSI CorrectionDocument7 pagesCNC 2014 Physique-1 TSI CorrectionAhmed AblPas encore d'évaluation
- 1-Dossier TechniqueDocument10 pages1-Dossier Techniquejuliette ravinetPas encore d'évaluation
- Corrrect Cnc10 PH1 TSIDocument6 pagesCorrrect Cnc10 PH1 TSIzazazaz2000Pas encore d'évaluation
- TD 01Document4 pagesTD 01Asmaa KasmiPas encore d'évaluation
- Notice CNCDocument29 pagesNotice CNCYassine AguiebPas encore d'évaluation
- TP1 E-Skate - Commande01Document6 pagesTP1 E-Skate - Commande01Titouan GarnierPas encore d'évaluation
- AsservissementsDocument14 pagesAsservissementsanon_151712057Pas encore d'évaluation
- Ctions Mecaniques: Exercice 1: Solide Soumis A Deux GlisseursDocument20 pagesCtions Mecaniques: Exercice 1: Solide Soumis A Deux GlisseursM-zlle MalakPas encore d'évaluation
- TD29 Filtrage Passe-Bas, Isolation Composante Continue-CorrigeDocument3 pagesTD29 Filtrage Passe-Bas, Isolation Composante Continue-CorrigeLahcen ElamraouiPas encore d'évaluation
- PRBLM Intégration MPDocument9 pagesPRBLM Intégration MPSalma Za100% (1)
- Physique 2 Psi 2023Document6 pagesPhysique 2 Psi 2023Ahmed ZhiriPas encore d'évaluation
- Analyse Informatique de Tirs Longue Distance-Angle Et DérivesDocument8 pagesAnalyse Informatique de Tirs Longue Distance-Angle Et DérivesLejaxhePas encore d'évaluation
- Chapitre 12: Réflexion D'une Onde Électromagnétique Sur Un Conducteur ParfaitDocument9 pagesChapitre 12: Réflexion D'une Onde Électromagnétique Sur Un Conducteur ParfaitBahae SlimPas encore d'évaluation
- Loi Du Moment CinétiqueDocument31 pagesLoi Du Moment CinétiqueTarek AmarPas encore d'évaluation
- Examen Si SMB 2022 Session Rattrapage SujetDocument17 pagesExamen Si SMB 2022 Session Rattrapage SujetAsmae BellaPas encore d'évaluation
- CNC Info 2018 MPDocument12 pagesCNC Info 2018 MPSalouma BoutanfitPas encore d'évaluation
- Cours Physique Mpsi NNNDocument453 pagesCours Physique Mpsi NNNAli HouasPas encore d'évaluation
- Déterminants de Vandermonde Et de CauchyDocument6 pagesDéterminants de Vandermonde Et de CauchyMoad MalmiPas encore d'évaluation
- La Physique Des Montagnes RussesDocument19 pagesLa Physique Des Montagnes Russesrayassmine18Pas encore d'évaluation
- CB 1-TSI 2017-2018 NewDocument6 pagesCB 1-TSI 2017-2018 NewMbaira LeilaPas encore d'évaluation
- Corriger Rem 2 Analyse Sys MLDocument4 pagesCorriger Rem 2 Analyse Sys MLmPas encore d'évaluation
- Maths X PC 1998 M2 (Enoncé 1)Document4 pagesMaths X PC 1998 M2 (Enoncé 1)LM --Pas encore d'évaluation
- Notice CNC 2014 FinalDocument23 pagesNotice CNC 2014 FinalSoufian Amzil100% (1)
- Cours ETKDocument95 pagesCours ETKDo OuPas encore d'évaluation
- TD 8 EOM ProP Guidées 1718Document3 pagesTD 8 EOM ProP Guidées 1718Souhail MssassiPas encore d'évaluation
- Cia2 - Basic OpampDocument12 pagesCia2 - Basic OpampPascal NouetPas encore d'évaluation
- Objectifs: FI: Génie Mathématique & Informatique G.M.IDocument1 pageObjectifs: FI: Génie Mathématique & Informatique G.M.IArnous's MoHameedPas encore d'évaluation
- CSP ScriptPiezoelectricsDocument10 pagesCSP ScriptPiezoelectricsmeryem abidaPas encore d'évaluation
- These 16 NovDocument149 pagesThese 16 Novkarima naderPas encore d'évaluation
- Optique GéométriqueDocument39 pagesOptique Géométriquethe knowledge is powerPas encore d'évaluation
- COMAXDocument5 pagesCOMAXIlyas MhammediPas encore d'évaluation
- Mouvement Des Particules Chargées Dans Un Champ Électromagnétique Mouvement Des Particules Chargées Dans Un Champ ÉlectromagnétiqueDocument9 pagesMouvement Des Particules Chargées Dans Un Champ Électromagnétique Mouvement Des Particules Chargées Dans Un Champ ÉlectromagnétiqueCheujeu chaldouPas encore d'évaluation
- Exercice: Les Nombres AmisDocument12 pagesExercice: Les Nombres AmisMIMOUNIPas encore d'évaluation
- Chapitre 2 Avec Exercices-Systèmes Non-LinéairesDocument13 pagesChapitre 2 Avec Exercices-Systèmes Non-Linéairesmohamed100% (1)
- Solution EF-OV-2021-22Document5 pagesSolution EF-OV-2021-22ZoZo ChenPas encore d'évaluation
- CNC MP 2010 Physique 2 EpreuveDocument10 pagesCNC MP 2010 Physique 2 EpreuveYassir Sadiq ElfilaliPas encore d'évaluation
- Exo de ConcoursDocument11 pagesExo de ConcoursguissPas encore d'évaluation
- TD s5 Quantique PDFDocument56 pagesTD s5 Quantique PDFSafaa El achhab0% (1)
- TIMIYA2223Document24 pagesTIMIYA2223Salh JerPas encore d'évaluation
- PC PHYSIQUE CENTRALE 1 2002.extraitDocument4 pagesPC PHYSIQUE CENTRALE 1 2002.extraitNadaPas encore d'évaluation
- MP MATHS MINES 1 2016.extraitDocument4 pagesMP MATHS MINES 1 2016.extraitIlyas MhammediPas encore d'évaluation
- TD 2 Signaux PériodiquesDocument4 pagesTD 2 Signaux PériodiquesMohamed MedPas encore d'évaluation
- TD1 - CorrectionDocument19 pagesTD1 - Correctionfrançois lutorPas encore d'évaluation
- CCP 2012 MP m2 CorrigeDocument7 pagesCCP 2012 MP m2 CorrigeAmira ZarglayounPas encore d'évaluation
- 02 Elec-Num Td-CorrigeDocument2 pages02 Elec-Num Td-CorrigeHouda GuedriPas encore d'évaluation
- Torrichi MPM PDFDocument106 pagesTorrichi MPM PDFOumarou KontaPas encore d'évaluation
- 2) Champ Électrostatique Dans Un Condensateur Plan (Voir Également TP)Document1 page2) Champ Électrostatique Dans Un Condensateur Plan (Voir Également TP)Amine AlaoUii Alaoui100% (1)
- Eln InstrumentationDocument27 pagesEln InstrumentationMarquiz DitchiPas encore d'évaluation
- Examen Final Auto Iaa3Document5 pagesExamen Final Auto Iaa3Simon KoutouaPas encore d'évaluation
- Aut215 PDFDocument197 pagesAut215 PDFKhalil HsainePas encore d'évaluation
- Corrigé TD 20 - Lois Entrée-Sortie en Position Et en VitesseDocument9 pagesCorrigé TD 20 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- (TDM) (FO) Formulaire Theorie Des MecanismesDocument2 pages(TDM) (FO) Formulaire Theorie Des MecanismesSimoMonkadPas encore d'évaluation
- Corrigé Examen MIP C1001 2013 2014 Semestre 2 PDFDocument7 pagesCorrigé Examen MIP C1001 2013 2014 Semestre 2 PDFعادل الحمديPas encore d'évaluation
- CI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeDocument8 pagesCI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- Automatique 1ereannee Partie2Document20 pagesAutomatique 1ereannee Partie2bhffuhPas encore d'évaluation
- CI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument10 pagesCI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- Integration Scei 2020Document2 pagesIntegration Scei 2020BalalaŇaŖîfPas encore d'évaluation
- PolytechDocument7 pagesPolytechBalalaŇaŖîfPas encore d'évaluation
- IliasssDocument13 pagesIliasssBalalaŇaŖîf100% (1)
- CcinpDocument12 pagesCcinpBalalaŇaŖîfPas encore d'évaluation
- Hors Erasmus 14 Pays, 31 Partenaires Argentine Brésil Erasmus 19 Pays, 38 PartenairesDocument2 pagesHors Erasmus 14 Pays, 31 Partenaires Argentine Brésil Erasmus 19 Pays, 38 PartenairesBalalaŇaŖîfPas encore d'évaluation
- I - ResultatsDocument1 pageI - ResultatsBalalaŇaŖîfPas encore d'évaluation
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- Plaquette CCINPDocument8 pagesPlaquette CCINPBalalaŇaŖîfPas encore d'évaluation
- Génie InfoDocument2 pagesGénie InfoBalalaŇaŖîfPas encore d'évaluation
- Cours 14Document4 pagesCours 14BalalaŇaŖîfPas encore d'évaluation
- ENSIBSDocument13 pagesENSIBSBalalaŇaŖîfPas encore d'évaluation
- CNC Si MP 2019Document25 pagesCNC Si MP 2019BalalaŇaŖîfPas encore d'évaluation
- Cours 10Document4 pagesCours 10BalalaŇaŖîfPas encore d'évaluation
- Cours 04Document10 pagesCours 04BalalaŇaŖîfPas encore d'évaluation
- 16 Poster Int paraDocument1 page16 Poster Int paraBalalaŇaŖîfPas encore d'évaluation
- 03 Poster ReductionDocument1 page03 Poster ReductionBalalaŇaŖîfPas encore d'évaluation
- Exo MatricesDocument3 pagesExo MatricesBalalaŇaŖîfPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- TP Ansys - 2018 2019Document4 pagesTP Ansys - 2018 2019Oualid MahanPas encore d'évaluation
- Gare de Triage MecaDocument3 pagesGare de Triage Mecala physique selon le programme FrançaisPas encore d'évaluation
- 669 1 PDFDocument4 pages669 1 PDFMohsen LaabidiPas encore d'évaluation
- 5 CisaillementDocument4 pages5 CisaillementAbderrazak Nassiri0% (1)
- Chapitre2 Critère de Performance D'une RégulationDocument46 pagesChapitre2 Critère de Performance D'une RégulationAYOUB RIAD100% (2)
- 04 MECA0444-ArbresIDocument46 pages04 MECA0444-ArbresICasa MaestroPas encore d'évaluation
- TD - Vibrationdes SystemesDocument5 pagesTD - Vibrationdes SystemesLamyae KrimiPas encore d'évaluation
- AncrageDocument1 pageAncragesami nasr100% (1)
- Chapiitre 6 - CORRDocument27 pagesChapiitre 6 - CORRDidaBouchPas encore d'évaluation
- Meca Flu HydrostatiqueDocument39 pagesMeca Flu HydrostatiqueNowe Ahmade100% (1)
- Chapitre 7 Forces CentralesDocument10 pagesChapitre 7 Forces CentralesChai mae AgnawPas encore d'évaluation
- Sujet 25 - LogoDocument6 pagesSujet 25 - Logohousinmechani1Pas encore d'évaluation
- Os Chimie Chap1 p59-62 Exercices SyntheseDocument4 pagesOs Chimie Chap1 p59-62 Exercices SyntheseCassandra MaaloufPas encore d'évaluation
- Colle c1Document9 pagesColle c1xzi0515Pas encore d'évaluation
- Spect. Vibr. 1Document20 pagesSpect. Vibr. 1bouchra boudjPas encore d'évaluation
- Crs CM Chap3Document10 pagesCrs CM Chap3zakaryaPas encore d'évaluation
- Esdep: Systemes Structuraux: BatimentsDocument19 pagesEsdep: Systemes Structuraux: BatimentssamimontassarPas encore d'évaluation
- Exercices 1Document31 pagesExercices 1urielPas encore d'évaluation
- PFD PDFDocument2 pagesPFD PDFDamien MirandaPas encore d'évaluation
- Transmissions GénéralitésDocument24 pagesTransmissions GénéralitésMOHAMED CHERIF KHATRAOUI100% (1)
- Onde Mecanique 2011Document20 pagesOnde Mecanique 2011Yeet server YesPas encore d'évaluation
- الكود الجزائري 02Document63 pagesالكود الجزائري 02Hany SabryPas encore d'évaluation