Vous aimerez peut-être aussi
- Cours Régulation Asservissement I IIDocument217 pagesCours Régulation Asservissement I IIcaptain dona0% (1)
- S51 Etude Fonctionnelle Des SystemesDocument10 pagesS51 Etude Fonctionnelle Des SystemeskhaliphaPas encore d'évaluation
- LES MACROS AVEC GOOGLE SHEETS: Programmer en JavascriptD'EverandLES MACROS AVEC GOOGLE SHEETS: Programmer en JavascriptPas encore d'évaluation
- 8iblp-Cahier de Technologie 1er Sec Couleur PDFDocument99 pages8iblp-Cahier de Technologie 1er Sec Couleur PDFGuy Ygal100% (1)
- Cour 1 - VirtualisationDocument24 pagesCour 1 - Virtualisationjeremie zehouPas encore d'évaluation
- Cours Etude Systemes Complet SupDocument30 pagesCours Etude Systemes Complet SupHatem BentaherPas encore d'évaluation
- Guide Investir Dans Les PME en AfriqueDocument74 pagesGuide Investir Dans Les PME en AfriquePDG EYAFPas encore d'évaluation
- Aid Memoire XP 18-545Document2 pagesAid Memoire XP 18-545Lotfi Merabet75% (4)
- Déformé D'un Portique Bi-Encastré: Câble de Branchement Câbles Vers Les Appuis Du PortiqueDocument11 pagesDéformé D'un Portique Bi-Encastré: Câble de Branchement Câbles Vers Les Appuis Du PortiqueFarahBoughanmiPas encore d'évaluation
- Analyse Fonctionnelle TPDocument13 pagesAnalyse Fonctionnelle TPhayet debbichPas encore d'évaluation
- Automate Programmable PDFDocument62 pagesAutomate Programmable PDFElkhalil OunarhiPas encore d'évaluation
- 1 AutomatismeDocument16 pages1 AutomatismeAYMAN COUKIPas encore d'évaluation
- Audit Cycle VenteDocument38 pagesAudit Cycle VenteaminePas encore d'évaluation
- Les Systèmes AutomatisésDocument70 pagesLes Systèmes Automatisésl mPas encore d'évaluation
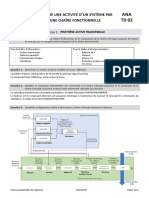
- ANA TD02 Corrigé - Décrire Une Activité D'un Système Par Une Chaîne FonctionnelleDocument2 pagesANA TD02 Corrigé - Décrire Une Activité D'un Système Par Une Chaîne Fonctionnellemansour100% (2)
- T 200 IDocument36 pagesT 200 Iref100% (1)
- Architecture FonctionnelleDocument9 pagesArchitecture FonctionnelleSome BullPas encore d'évaluation
- S52 1 Analyse Fonctionnelle Interne Dun SA SyntheseDocument8 pagesS52 1 Analyse Fonctionnelle Interne Dun SA SyntheseyassPas encore d'évaluation
- Sequence1 Chapitre2 CoursDocument17 pagesSequence1 Chapitre2 Coursام علاءPas encore d'évaluation
- S52-1 - Analyse Fonctionnelle Interne D'un SADocument24 pagesS52-1 - Analyse Fonctionnelle Interne D'un SAFosseni DialloPas encore d'évaluation
- ElevDocument9 pagesElevAnis SuissiPas encore d'évaluation
- SMB DocElevDocument9 pagesSMB DocElevOmom chamarohPas encore d'évaluation
- Correction TDDocument5 pagesCorrection TDTasnym JalelPas encore d'évaluation
- Analyse Fonctionnelle InterneDocument10 pagesAnalyse Fonctionnelle InterneossaymoPas encore d'évaluation
- Généralités Sur Les Systã Mes Automatisã©sDocument8 pagesGénéralités Sur Les Systã Mes Automatisã©sdmaty910Pas encore d'évaluation
- CI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument10 pagesCI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- Systèmes Automatisés de ProductionDocument13 pagesSystèmes Automatisés de Productionchahidamine22Pas encore d'évaluation
- Analyse Fonctionnelle InterneDocument11 pagesAnalyse Fonctionnelle InterneossaymoPas encore d'évaluation
- 01-Cours-Chaine FonctionnelleDocument5 pages01-Cours-Chaine FonctionnelleMohamed HendaouiPas encore d'évaluation
- Cours AIDocument45 pagesCours AITarek HouidiPas encore d'évaluation
- Structure Generale - Prof PDFDocument7 pagesStructure Generale - Prof PDFMeriem mimiPas encore d'évaluation
- CHAP1-LAT64 (1)Document7 pagesCHAP1-LAT64 (1)riadbouhzila19Pas encore d'évaluation
- Cours AuDocument9 pagesCours AuAdil MehdaryPas encore d'évaluation
- Etude Structurelle Des Systèmes - WikiMéca PDFDocument6 pagesEtude Structurelle Des Systèmes - WikiMéca PDFMustafa MoussaouiPas encore d'évaluation
- Cours TD Structure D'un Système PDFDocument16 pagesCours TD Structure D'un Système PDFOmar FigoPas encore d'évaluation
- 40Document4 pages40Benjamin BoloPas encore d'évaluation
- Chapitre IV - Cours - TEAI - 4Document10 pagesChapitre IV - Cours - TEAI - 4Wã Lïd SãådätPas encore d'évaluation
- IIA - Régulation Et Asszervissement - Chap3 - Schema Bloc - 20 Oct 22Document4 pagesIIA - Régulation Et Asszervissement - Chap3 - Schema Bloc - 20 Oct 22TECHNOLOGIES MODERNES DU CAMEROUNPas encore d'évaluation
- Analyse FonctionnelleDocument28 pagesAnalyse FonctionnelleAmina DinariPas encore d'évaluation
- cours+de+Technologie+Mecanique+25 09 06+séance+1Document37 pagescours+de+Technologie+Mecanique+25 09 06+séance+1Sissi MissiPas encore d'évaluation
- 2019 Cours Automatismes-1Document41 pages2019 Cours Automatismes-1wsrfcvPas encore d'évaluation
- Chapitre 1 - Géneralités Sur Les SADocument7 pagesChapitre 1 - Géneralités Sur Les SAMohammed RhaiouzPas encore d'évaluation
- Chap-1 Cours1Document8 pagesChap-1 Cours1Louis PouchepadassPas encore d'évaluation
- Cours TD Structure D'un SystemeDocument19 pagesCours TD Structure D'un SystemeYAC ENPPas encore d'évaluation
- Copie de Exo 1 Chaine Denergie Chaine Dinformation 2003 EleveDocument2 pagesCopie de Exo 1 Chaine Denergie Chaine Dinformation 2003 Eleve82dkftw8g6Pas encore d'évaluation
- Chapitre 1 Et 2.pptm PDFDocument74 pagesChapitre 1 Et 2.pptm PDFNajlaealalawiPas encore d'évaluation
- Automatismes IndustrielsDocument42 pagesAutomatismes IndustrielsWiame Bouyoussef100% (1)
- Technologie Des ComposantsDocument34 pagesTechnologie Des ComposantsSamuel LavenirPas encore d'évaluation
- Classe Tle F2 Programme en Relecture ADONGDocument62 pagesClasse Tle F2 Programme en Relecture ADONGRefrain Petoh moufoPas encore d'évaluation
- Chapitre1 AutomatismeDocument9 pagesChapitre1 AutomatismeWael Maatoug100% (1)
- Analyse Fonctionnelle Interne - Chaine Dénergie Et Dinformation - Copie FinaleDocument8 pagesAnalyse Fonctionnelle Interne - Chaine Dénergie Et Dinformation - Copie FinaleOuechtati Mounir100% (1)
- CI01 Cours - Analyser Et Décrire La Structure D - Un SystèmeDocument9 pagesCI01 Cours - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- Indpet1mas Lessons-Identification DebbahDocument67 pagesIndpet1mas Lessons-Identification Debbahhamza elgarragPas encore d'évaluation
- Cours 09Document9 pagesCours 09BalalaŇaŖîfPas encore d'évaluation
- TP OP Diag Etat StateflowDocument3 pagesTP OP Diag Etat StateflowAdrien LupinPas encore d'évaluation
- Sequence2 Chapitre3 CoursDocument9 pagesSequence2 Chapitre3 CoursMmaher MaherPas encore d'évaluation
- Cours Sur Analyse FonctionnelleDocument6 pagesCours Sur Analyse FonctionnellePapy ElpololokoPas encore d'évaluation
- Objectif de SeanceDocument2 pagesObjectif de SeanceKiller N'gbessoPas encore d'évaluation
- 03-Conception Ch2Document39 pages03-Conception Ch2aaaboudaPas encore d'évaluation
- Modélisatio Dun Système Technique 2011 2012 (Rhimi Mohamed)Document3 pagesModélisatio Dun Système Technique 2011 2012 (Rhimi Mohamed)Lamia ChainePas encore d'évaluation
- Modélisation Des Systèmes Dynamiques Continus: Cours de Cds2 Chapitre I 2 AnnéeDocument14 pagesModélisation Des Systèmes Dynamiques Continus: Cours de Cds2 Chapitre I 2 AnnéeRoch d'ARGAIGNONPas encore d'évaluation
- TP Nc2b02 Asservissement de La Vitesse Dun Moteur A Courant ContinuuDocument3 pagesTP Nc2b02 Asservissement de La Vitesse Dun Moteur A Courant Continuuangelico josephPas encore d'évaluation
- Cours Structure Systeme EleveDocument6 pagesCours Structure Systeme Elevetallef001Pas encore d'évaluation
- Cours PGM API Chapt2 PDFDocument28 pagesCours PGM API Chapt2 PDFtoto111111111Pas encore d'évaluation
- Suite Chapitre 2: Notion de Fonction de Transfert: 2-1 - IntroductionDocument7 pagesSuite Chapitre 2: Notion de Fonction de Transfert: 2-1 - IntroductionIhab RayanPas encore d'évaluation
- Regulation CH 1Document12 pagesRegulation CH 1imnjhd illpmuePas encore d'évaluation
- Expression AnglaisDocument2 pagesExpression AnglaisbhffuhPas encore d'évaluation
- ?UTF-8?Q?2022 R C3 A9sultats Des C3 A9preuves C3 A9crites - PDF?Document1 page?UTF-8?Q?2022 R C3 A9sultats Des C3 A9preuves C3 A9crites - PDF?bhffuhPas encore d'évaluation
- Correction Comb in A To I Reps IDocument29 pagesCorrection Comb in A To I Reps IbhffuhPas encore d'évaluation
- 2022 Tableau RecapitulatifDocument1 page2022 Tableau RecapitulatifbhffuhPas encore d'évaluation
- PR Eparation Aux Oraux 2017-2018: Lycée Chateaubriand GRELA FabriceDocument39 pagesPR Eparation Aux Oraux 2017-2018: Lycée Chateaubriand GRELA FabricebhffuhPas encore d'évaluation
- MPSI2 - PC - Ch31 - ADLM - Structure Électronique Des Atomes - CoursDocument11 pagesMPSI2 - PC - Ch31 - ADLM - Structure Électronique Des Atomes - CoursbhffuhPas encore d'évaluation
- DS06 Asymptotique Mahler SolDocument11 pagesDS06 Asymptotique Mahler SolbhffuhPas encore d'évaluation
- Structures Algébriques: Table Des MatièresDocument27 pagesStructures Algébriques: Table Des MatièresbhffuhPas encore d'évaluation
- Polynômes (Chap19)Document34 pagesPolynômes (Chap19)bhffuhPas encore d'évaluation
- 32 Dimension PlancheDocument2 pages32 Dimension PlanchebhffuhPas encore d'évaluation
- Fractions Rationnelles - (Chap20)Document17 pagesFractions Rationnelles - (Chap20)bhffuhPas encore d'évaluation
- TPE 1996 M Option CorrigeDocument7 pagesTPE 1996 M Option CorrigebhffuhPas encore d'évaluation
- DM3 MPSI2 22 23 CorrectionDocument6 pagesDM3 MPSI2 22 23 CorrectionbhffuhPas encore d'évaluation
- 02 Revisions Espaces Vectoriels Planche CorrigesDocument14 pages02 Revisions Espaces Vectoriels Planche CorrigesbhffuhPas encore d'évaluation
- Ds 05 Espaces VectorielsDocument10 pagesDs 05 Espaces VectorielsbhffuhPas encore d'évaluation
- Formule Des Trois Niveaux FicheDocument2 pagesFormule Des Trois Niveaux FichebhffuhPas encore d'évaluation
- Problème N 18: Espaces VectorielsDocument2 pagesProblème N 18: Espaces VectorielsbhffuhPas encore d'évaluation
- UntitledDocument2 pagesUntitledbhffuhPas encore d'évaluation
- Polynomes 21Document2 pagesPolynomes 21bhffuhPas encore d'évaluation
- UntitledDocument7 pagesUntitledbhffuhPas encore d'évaluation
- 02 Revisions Espaces Vectoriels PlancheDocument3 pages02 Revisions Espaces Vectoriels PlancheMohamed KonatePas encore d'évaluation
- Ds 8Document2 pagesDs 8bhffuhPas encore d'évaluation
- UntitledDocument10 pagesUntitledbhffuhPas encore d'évaluation
- Solpolynomes 21Document6 pagesSolpolynomes 21bhffuhPas encore d'évaluation
- UN ASPECT MÉCONNU D'AVALOKITEŚVARA - de MallmannDocument9 pagesUN ASPECT MÉCONNU D'AVALOKITEŚVARA - de MallmannClaudia RamassoPas encore d'évaluation
- Katalogs-19-Fusibles A Couteaux NHDocument8 pagesKatalogs-19-Fusibles A Couteaux NHhakimPas encore d'évaluation
- Mouteur DCDocument7 pagesMouteur DCElmokh LassaadPas encore d'évaluation
- Practice+exam+chap+3 - 1 - 1Document7 pagesPractice+exam+chap+3 - 1 - 1Box OfficePas encore d'évaluation
- Fin OofDocument24 pagesFin OofAhmed Ouss0% (1)
- Document 1249Document11 pagesDocument 1249MrYodaaPas encore d'évaluation
- RégimeDocument12 pagesRégimeernestito2010Pas encore d'évaluation
- Guide de Logiciel Sap20000 CopierDocument54 pagesGuide de Logiciel Sap20000 CopierAbdou HababaPas encore d'évaluation
- 3eme Biochimie 2019-2020 Bouzidi A L3 Bioch Cours ToxicologieDocument14 pages3eme Biochimie 2019-2020 Bouzidi A L3 Bioch Cours ToxicologieM.B. IsmailPas encore d'évaluation
- T.D. N°2 - Les AmortissementsDocument3 pagesT.D. N°2 - Les Amortissementsangelinaa.bento05Pas encore d'évaluation
- Boc 20221230Document23 pagesBoc 20221230electronicsobed the son of GODPas encore d'évaluation
- L1 - GPL - Cours Numéro 01 La QualitéDocument13 pagesL1 - GPL - Cours Numéro 01 La Qualitéformation distancePas encore d'évaluation
- Réussir Aux Différentes Évaluations D'un Entretien Part 1Document30 pagesRéussir Aux Différentes Évaluations D'un Entretien Part 1Daniel Constant AttaPas encore d'évaluation
- CONDUITE TP2 Avec Quadrillage (1) 2Document6 pagesCONDUITE TP2 Avec Quadrillage (1) 2Agbatou Jean Baptiste N'chiepoPas encore d'évaluation
- Guide Satellite Clubs FRDocument4 pagesGuide Satellite Clubs FRsoufiane mrabetPas encore d'évaluation
- UM Operation Manual FRFR 27021611646554123Document299 pagesUM Operation Manual FRFR 27021611646554123Georges TaradauxPas encore d'évaluation
- Premier Exercice: (7 Points) Chauffe-Eau Solaire: Lire Attentivement L'extrait Suivant Puis Répondre Aux QuestionsDocument4 pagesPremier Exercice: (7 Points) Chauffe-Eau Solaire: Lire Attentivement L'extrait Suivant Puis Répondre Aux QuestionsHouda ChanPas encore d'évaluation
- InstallationDocument9 pagesInstallationfatihaPas encore d'évaluation
- François Brune - La Vierge Du MexiqueDocument681 pagesFrançois Brune - La Vierge Du MexiquethanosPas encore d'évaluation
- Tome 2 Impacts EnvironnementauxDocument49 pagesTome 2 Impacts EnvironnementauxUlrich Ralph NjoyaPas encore d'évaluation
- These ND PAreconf VF PDFDocument174 pagesThese ND PAreconf VF PDFRachid HamianiPas encore d'évaluation
- TP 02 La Masse VolumiqueDocument5 pagesTP 02 La Masse VolumiqueDai MentPas encore d'évaluation
- Entretien Du Reseau D'Eclairage Public Au Sein de La CommuneDocument24 pagesEntretien Du Reseau D'Eclairage Public Au Sein de La CommuneMProd AmmoPas encore d'évaluation
- SigmaDocument2 pagesSigmaAli KPas encore d'évaluation