Vous aimerez peut-être aussi
- Poly M Canique G N Rale 2015-1Document37 pagesPoly M Canique G N Rale 2015-1khawla slimeniPas encore d'évaluation
- Exercices d'intégrales et d'équations intégro-différentiellesD'EverandExercices d'intégrales et d'équations intégro-différentiellesPas encore d'évaluation
- Chaos Et Bifurcations Dans Les Systèmes Dynamiques en Dimensions N (N 1)Document124 pagesChaos Et Bifurcations Dans Les Systèmes Dynamiques en Dimensions N (N 1)ato ndongo fabricePas encore d'évaluation
- Galilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsD'EverandGalilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsPas encore d'évaluation
- PolyDocument50 pagesPolyErd NdinePas encore d'évaluation
- Cours de MR - Ikhrrazen - MMC PDFDocument48 pagesCours de MR - Ikhrrazen - MMC PDFSaid MrfPas encore d'évaluation
- TD MMC - Master1 Esupj 2019 2020Document3 pagesTD MMC - Master1 Esupj 2019 2020Lionel BEYIPas encore d'évaluation
- 1agm 2019-2020 PDFDocument11 pages1agm 2019-2020 PDFAhmed AhmedPas encore d'évaluation
- Exercices Corrigés - Guilhem Mollon PDFDocument57 pagesExercices Corrigés - Guilhem Mollon PDFDjelloul ReziniPas encore d'évaluation
- DS SN Hydrostatique 2016Document3 pagesDS SN Hydrostatique 2016jackPas encore d'évaluation
- Rdmtorseurdecohesion PDFDocument4 pagesRdmtorseurdecohesion PDFMustafa MoussaouiPas encore d'évaluation
- Exercice FluidiqueDocument11 pagesExercice FluidiqueAmina RazguiPas encore d'évaluation
- Correction EMD 1 MMC 2011Document1 pageCorrection EMD 1 MMC 2011Houcine Cool100% (2)
- MMCDocument141 pagesMMCMohamed LaliouiPas encore d'évaluation
- TD m2 Meca-SolDocument8 pagesTD m2 Meca-SolredaPas encore d'évaluation
- EXO - MMC CORR PDFDocument4 pagesEXO - MMC CORR PDFJunior Boum100% (2)
- Mec Des Fluides Docteur M'hamed BERIACHE PDFDocument107 pagesMec Des Fluides Docteur M'hamed BERIACHE PDFsilien lavilsonPas encore d'évaluation
- Polycoie Maths I ENITDocument90 pagesPolycoie Maths I ENITmarwen12345100% (1)
- Energie de DéformationDocument12 pagesEnergie de DéformationMaxton HunterPas encore d'évaluation
- Méthode de Résolution Des EDP Par Séparation de Variables ApplicationsDocument60 pagesMéthode de Résolution Des EDP Par Séparation de Variables ApplicationsMireille KragbePas encore d'évaluation
- Resolution Numerique Des Equations Aux Derivees PartiellesDocument22 pagesResolution Numerique Des Equations Aux Derivees PartiellesLyna Meriem LAZLAOUIPas encore d'évaluation
- MMCDocument2 pagesMMCmsila samiPas encore d'évaluation
- TD ExercicesDocument8 pagesTD Exercicesesdras ABLYPas encore d'évaluation
- TD MecafluDocument13 pagesTD MecafluRomain ChevreuilPas encore d'évaluation
- Cours MMC CH1Document21 pagesCours MMC CH1Khaled GammoudiPas encore d'évaluation
- Cours RDMDocument30 pagesCours RDMSandratra NavalonaPas encore d'évaluation
- RDM1 CoursDocument6 pagesRDM1 CoursLéon ArmorPas encore d'évaluation
- DEFORMATIONDocument58 pagesDEFORMATIONishaq AllalPas encore d'évaluation
- Cours MDFDocument53 pagesCours MDFIbra HimPas encore d'évaluation
- Capitre 4 Mdf-ConvertiDocument9 pagesCapitre 4 Mdf-ConvertiLina alikh100% (1)
- DS 2017 - Corrigé PDFDocument3 pagesDS 2017 - Corrigé PDFBOU100% (2)
- Exo ProbaDocument245 pagesExo ProbaDamas HOUNSOUNONPas encore d'évaluation
- Maths 6 e CorrigésDocument39 pagesMaths 6 e CorrigésAnonymous RVsrNhuPas encore d'évaluation
- Exercices de MMCDocument15 pagesExercices de MMCWael BadriPas encore d'évaluation
- Résistance Au CisaillementDocument51 pagesRésistance Au CisaillementBerthe MohamedPas encore d'évaluation
- DS 2013-2014Document2 pagesDS 2013-2014jihenk100% (1)
- Cours Complet de MMCDocument85 pagesCours Complet de MMCYoussef YoussefPas encore d'évaluation
- Examen MMC Oct 2014 Sujet Et CorrectionDocument3 pagesExamen MMC Oct 2014 Sujet Et CorrectionHoussem HassanetPas encore d'évaluation
- Cours 4 MMCDocument11 pagesCours 4 MMCmsila samiPas encore d'évaluation
- Analyse Numerique Des EDP1Document84 pagesAnalyse Numerique Des EDP1beckerrolandhPas encore d'évaluation
- Méthodes À RetenirDocument5 pagesMéthodes À RetenirAngus MakPas encore d'évaluation
- MMC Chap6 PDFDocument16 pagesMMC Chap6 PDFAmd JedPas encore d'évaluation
- CC MécaniqueDocument1 pageCC MécaniqueZakaria OrrqPas encore d'évaluation
- Cours Maths 3 PDFDocument116 pagesCours Maths 3 PDFAntes de Partir, A.C.Pas encore d'évaluation
- Elasticite Et RDM Part IIDocument54 pagesElasticite Et RDM Part IIAbdelmoumen GuedriPas encore d'évaluation
- Cours MecaniqueDocument171 pagesCours MecaniqueBachiri TaharPas encore d'évaluation
- TD3 - MMC - Option - 2017 - 2018Document2 pagesTD3 - MMC - Option - 2017 - 2018zakaria jamesPas encore d'évaluation
- Corrigé Pour M1 ENDocument8 pagesCorrigé Pour M1 ENhichemPas encore d'évaluation
- Chapitre Fluide1 Watsapp PDFDocument21 pagesChapitre Fluide1 Watsapp PDFEL MAHDI EL WARADY100% (1)
- Amphi 4 Les Equations de Navier StokesDocument61 pagesAmphi 4 Les Equations de Navier StokesSîImoHäāķīīmPas encore d'évaluation
- Chapitre4 5rdm Cisaillement TorsionDocument24 pagesChapitre4 5rdm Cisaillement TorsionJacques NdavaroPas encore d'évaluation
- Partie-III Exercices Resolus TD Rayonnement Thermique-M1ermDocument8 pagesPartie-III Exercices Resolus TD Rayonnement Thermique-M1ermÔlá AchamouPas encore d'évaluation
- TD2 Mecanique Analytique2020 2021Document5 pagesTD2 Mecanique Analytique2020 2021Ahamadi ElhouyounPas encore d'évaluation
- Cours de Mecanique Des Fluides EtudiantsDocument122 pagesCours de Mecanique Des Fluides Etudiantsislem touffehi50% (2)
- Solide de HOOKDocument80 pagesSolide de HOOKHanane BenGamra0% (1)
- POLYMMC P.RoyesDocument411 pagesPOLYMMC P.RoyesJerome Minvielle100% (1)
- Chapitre I PDFDocument15 pagesChapitre I PDFرؤوف بوسعيدPas encore d'évaluation
- Mathématiques Appliquées, Chapitre 2Document19 pagesMathématiques Appliquées, Chapitre 2Abdelkader Faklani DouPas encore d'évaluation
- TPEDO1bis PDFDocument10 pagesTPEDO1bis PDFأبو كعب علاء الدينPas encore d'évaluation
- Quelques Applications Des Lois Fondamentales de La Physique À La Sécurité RoutièreDocument24 pagesQuelques Applications Des Lois Fondamentales de La Physique À La Sécurité RoutièreDBE MJSPas encore d'évaluation
- RPNS000100PP PDFDocument98 pagesRPNS000100PP PDFDBE MJSPas encore d'évaluation
- Chap 10 - Clôture SignalisationDocument6 pagesChap 10 - Clôture SignalisationDBE MJSPas encore d'évaluation
- Cheville - Général Note de CalculDocument10 pagesCheville - Général Note de CalculDBE MJSPas encore d'évaluation
- Anneau Pour AncreDocument3 pagesAnneau Pour AncreDBE MJSPas encore d'évaluation
- Ancres À PiedDocument1 pageAncres À PiedDBE MJSPas encore d'évaluation
- Note de Calcul AssainissementDocument3 pagesNote de Calcul AssainissementDBE MJSPas encore d'évaluation
- Groupes MF 01Document4 pagesGroupes MF 01DBE MJSPas encore d'évaluation
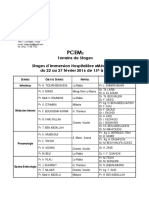
- Encadreurs Referents Et Chefs de Service Des Terrains de Stages Immersion MedecineDocument1 pageEncadreurs Referents Et Chefs de Service Des Terrains de Stages Immersion MedecineDBE MJSPas encore d'évaluation
- NF EN 1993-1-8 (Décembre 2005) Eurocode 3 - Calcul Des Structures en Acier - Partie 1-8 Calcul Des Assemblages (Indice de Classement P22-318-1)Document161 pagesNF EN 1993-1-8 (Décembre 2005) Eurocode 3 - Calcul Des Structures en Acier - Partie 1-8 Calcul Des Assemblages (Indice de Classement P22-318-1)DBE MJS100% (1)
- Editorial de L'interlettre Chemin Faisant 91Document5 pagesEditorial de L'interlettre Chemin Faisant 91Triblou MPas encore d'évaluation
- PP PDFDocument224 pagesPP PDFASPIRINE 7Pas encore d'évaluation
- MecaChap4 (GeomDesMasses) PDFDocument42 pagesMecaChap4 (GeomDesMasses) PDFKRONH CHHYTHEANPas encore d'évaluation
- Chap 1 Changement de RéférentielDocument18 pagesChap 1 Changement de RéférentielDavid Konan100% (1)
- Brix - Plato - SGDocument1 pageBrix - Plato - SGDave50% (2)
- LC 21-040Document8 pagesLC 21-040Simon Houde100% (2)
- Serie M Ndong PRF SL Physique Chimie Au Lycee Par WahabDocument11 pagesSerie M Ndong PRF SL Physique Chimie Au Lycee Par WahabAl amine DiopPas encore d'évaluation
- 12 ElectriciteDocument48 pages12 ElectricitemiottePas encore d'évaluation
- Chap 2 - Cours - M9 VFDocument17 pagesChap 2 - Cours - M9 VFait ijja100% (1)
- LP6 Travail Et Energie CinétiqueDocument2 pagesLP6 Travail Et Energie CinétiquesergiomisosPas encore d'évaluation
- Polycopié Des Travaux Dirigés de Mécanique Du PointDocument43 pagesPolycopié Des Travaux Dirigés de Mécanique Du PointNisrine Nisrinita50% (2)
- PhisiqueDocument106 pagesPhisiqueAli Ali100% (2)
- Svt MicrobesDocument7 pagesSvt MicrobesLamjed MissaouiPas encore d'évaluation
- Corriges Autres DynamiqueDocument4 pagesCorriges Autres Dynamiqueay. insPas encore d'évaluation
- Plaquettes en Terre Cuite: Norme Française HomologuéeDocument28 pagesPlaquettes en Terre Cuite: Norme Française HomologuéeAHMED RAIHANIPas encore d'évaluation
- Chimie (05points) :: Lycée Maknassy Alibi .A. Durée:2h SC - PhysiquesDocument3 pagesChimie (05points) :: Lycée Maknassy Alibi .A. Durée:2h SC - PhysiquesAmen RouissiPas encore d'évaluation
- Ballons HeliumDocument8 pagesBallons HeliumAri NomPas encore d'évaluation
- Rediger Un ExerciceDocument1 pageRediger Un ExercicephysiquePas encore d'évaluation
- Devoir Maison-2Document2 pagesDevoir Maison-2Mohamed MaimounyPas encore d'évaluation
- Com Nat Recueil Exercices IeBC 2010-2011Document22 pagesCom Nat Recueil Exercices IeBC 2010-2011ZayNabPas encore d'évaluation
- Tronc PhysiqDocument1 pageTronc PhysiqMed Amine HattakiPas encore d'évaluation
- Cinematique PDFDocument79 pagesCinematique PDFSaid ErrajiPas encore d'évaluation
- Les Trous Noirs by Matteo SmerlakDocument122 pagesLes Trous Noirs by Matteo Smerlaksamim1971Pas encore d'évaluation
- Hexapode: Developpement Mecatronique D'un Robot MarcheurDocument201 pagesHexapode: Developpement Mecatronique D'un Robot MarcheurLéopold AmyPas encore d'évaluation
- Travail D'une ForceDocument3 pagesTravail D'une ForcekokakolaPas encore d'évaluation
- 6 A Ondes 1Document9 pages6 A Ondes 1Mohamed MohamedPas encore d'évaluation
- Exercice Détermination de La Viscosité D'une Huile MoteurDocument3 pagesExercice Détermination de La Viscosité D'une Huile Moteurالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- Inpl T 1992 Bui Dinh TDocument164 pagesInpl T 1992 Bui Dinh TElvis HonvoPas encore d'évaluation
- 12 Cours - G Om Trie Des Masses PDFDocument14 pages12 Cours - G Om Trie Des Masses PDFSara MarouchePas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Production et propagation des sons: Les Grands Articles d'UniversalisD'EverandProduction et propagation des sons: Les Grands Articles d'UniversalisPas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- La somme existentielle II/III Le mystère de l'homme: Un mystère d'amourD'EverandLa somme existentielle II/III Le mystère de l'homme: Un mystère d'amourPas encore d'évaluation