Vous aimerez peut-être aussi
- 2008 Si Tsi GM PDFDocument14 pages2008 Si Tsi GM PDFma tlawa7ch el zeblaPas encore d'évaluation
- Fascicule TP Hydraulique PneumatiqueDocument14 pagesFascicule TP Hydraulique Pneumatiqueshayma MensiPas encore d'évaluation
- TD 01 - Analyse FonctionnelleDocument10 pagesTD 01 - Analyse Fonctionnellebhs channel100% (1)
- ISEPD P1 MA Groupe 6Document21 pagesISEPD P1 MA Groupe 6mouhamadou fadilou syllaPas encore d'évaluation
- Moteurs_a_taux_de_compression_variableDocument8 pagesMoteurs_a_taux_de_compression_variablebarett3Pas encore d'évaluation
- NT Circulateurs Vitesse Variable BLUEBAT 2011 - 230316 - 203437Document19 pagesNT Circulateurs Vitesse Variable BLUEBAT 2011 - 230316 - 203437gozlandavid54Pas encore d'évaluation
- Etude Equipement - QuestionsDocument7 pagesEtude Equipement - QuestionsfoutkuinoukeuaPas encore d'évaluation
- Principe de Fonctionnement Hdi Siemens 20 CarburantDocument7 pagesPrincipe de Fonctionnement Hdi Siemens 20 CarburantSIV100% (1)
- 2004 Bac-Pro-Vi CorrigeDocument16 pages2004 Bac-Pro-Vi CorrigeLuc Mutombo Mukulu75% (4)
- Pfe GM 0266Document67 pagesPfe GM 0266Walid SouidPas encore d'évaluation
- Injection-Essence BacDocument7 pagesInjection-Essence BacJoão DantasPas encore d'évaluation
- Moteurs A Taux de Compression VariableDocument8 pagesMoteurs A Taux de Compression Variablehoussem.dhiebPas encore d'évaluation
- C5 (X7) - B1HAD3P0 - 4 - 16:07:2012 - Fonction: Système D'injection Diesel (DELPHI DCM3Document27 pagesC5 (X7) - B1HAD3P0 - 4 - 16:07:2012 - Fonction: Système D'injection Diesel (DELPHI DCM3peltierPas encore d'évaluation
- Soutenance Du PFE de FIRAS Et EmineDocument25 pagesSoutenance Du PFE de FIRAS Et Emineachrefnasri456Pas encore d'évaluation
- Rapport FinalDocument67 pagesRapport Finalahmed ben rejebPas encore d'évaluation
- D5 - Technologie Et Fonctionnement Des Pompes CentrifugesDocument49 pagesD5 - Technologie Et Fonctionnement Des Pompes CentrifugesMadjid Hernandez100% (6)
- 05 - WBK17 - Pompes Maintenance & EntretienDocument61 pages05 - WBK17 - Pompes Maintenance & EntretienOussama AhbabouPas encore d'évaluation
- PompeDocument12 pagesPompeaminePas encore d'évaluation
- Fob2-Station de PompageDocument5 pagesFob2-Station de Pompageaymen Ait KessouPas encore d'évaluation
- Chapitre 3 PompeDocument23 pagesChapitre 3 Pompeguesmi manoubiyaPas encore d'évaluation
- 10078-5-Tp-Levee-Soupape-Etude-Poussoir 3Document12 pages10078-5-Tp-Levee-Soupape-Etude-Poussoir 3Netero 94Pas encore d'évaluation
- Pompes Et Compresseurs Exercices Et ProblemesDocument21 pagesPompes Et Compresseurs Exercices Et ProblemesHoussame Naim50% (2)
- Travaux Dirigés Série 6Document6 pagesTravaux Dirigés Série 6copie masterPas encore d'évaluation
- Bosch L LH Lu2 Jetronic BoursinDocument6 pagesBosch L LH Lu2 Jetronic Boursinibrahim rabbaj100% (1)
- Institut Supérieure Des Études TechnologiquesDocument9 pagesInstitut Supérieure Des Études Technologiquesatouf mohammedPas encore d'évaluation
- SystemeHDl PDFDocument58 pagesSystemeHDl PDFAbdelhak EzzahriouiPas encore d'évaluation
- AF SI TP Pompe Hydraulique de Xantia Serie 3Document10 pagesAF SI TP Pompe Hydraulique de Xantia Serie 3Jaouad Jad0% (1)
- Cours ActionneursDocument29 pagesCours ActionneursMohamed fouadPas encore d'évaluation
- Vanne de GazDocument10 pagesVanne de GazChaima KcPas encore d'évaluation
- TD 01 - Etude Des Systemes PDFDocument8 pagesTD 01 - Etude Des Systemes PDFZied KtariPas encore d'évaluation
- Sap 2019 SujetDocument16 pagesSap 2019 SujetPse UdoPas encore d'évaluation
- 6343 E2 DR Ap Agpf 2015Document13 pages6343 E2 DR Ap Agpf 2015ibrahim rabbajPas encore d'évaluation
- TP Centrale Hydraulique v2Document6 pagesTP Centrale Hydraulique v2Aicha DahmaniPas encore d'évaluation
- SSP 227 Partie 1 Le Système D Injection Common Rail Du V8 TDI de 3,3lDocument36 pagesSSP 227 Partie 1 Le Système D Injection Common Rail Du V8 TDI de 3,3lnaceur rbiiPas encore d'évaluation
- 1bac Si 1Document16 pages1bac Si 1Anis SuissiPas encore d'évaluation
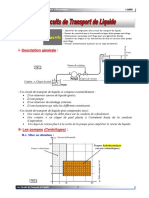
- Chap2 Les Circuits de Transport de LiquideDocument17 pagesChap2 Les Circuits de Transport de LiquideAla Massoudi100% (1)
- Direction À Assistance VariableDocument18 pagesDirection À Assistance VariableboujbalPas encore d'évaluation
- 5 DiagnosticDocument50 pages5 DiagnosticTraorePas encore d'évaluation
- 2019 Normal SoirDocument9 pages2019 Normal SoirAbdelhadi AZPas encore d'évaluation
- MDF Manip 4Document11 pagesMDF Manip 4Mayssem SouidPas encore d'évaluation
- Luban BDocument30 pagesLuban BJean Claude KonanPas encore d'évaluation
- Cours Sur Les Pompes PDFDocument6 pagesCours Sur Les Pompes PDFMaestro Abdellah57% (7)
- Presentation Injection Delphi DCM3.5 Moteur Dw10cted4Document39 pagesPresentation Injection Delphi DCM3.5 Moteur Dw10cted4Lycée Gaston MonnervillePas encore d'évaluation
- Vehicule4 PDFDocument39 pagesVehicule4 PDFMed Ali Maatoug100% (1)
- 4 - Fiche Technique PEG ADocument12 pages4 - Fiche Technique PEG ASADJI RachidPas encore d'évaluation
- Chapitre III Suite - Cavitation Et Loi de Similitude Dans Les Pompes Centrifuge-ConvertiDocument12 pagesChapitre III Suite - Cavitation Et Loi de Similitude Dans Les Pompes Centrifuge-ConvertiAbderrahim JamilPas encore d'évaluation
- Corrigé Bac Pro MEI 2021Document13 pagesCorrigé Bac Pro MEI 2021HakobyanPas encore d'évaluation
- 84 SGN 195 Irg PDFDocument44 pages84 SGN 195 Irg PDFhajerPas encore d'évaluation
- Expo HydroDocument36 pagesExpo HydroArlPas encore d'évaluation
- Etude Pompe PalettesDocument13 pagesEtude Pompe PalettesSabri WisPas encore d'évaluation
- 2616 Automatisme de Porte de Garage MecaniqueDocument16 pages2616 Automatisme de Porte de Garage MecaniqueJawher SalemPas encore d'évaluation
- Dimensionnement Du DistributeurDocument21 pagesDimensionnement Du DistributeurzakiaPas encore d'évaluation
- TP 2 Etude Pompe PalettesDocument13 pagesTP 2 Etude Pompe PalettesKheira BelPas encore d'évaluation
- TP PSIM Monte ChargeDocument6 pagesTP PSIM Monte ChargePenda NiassPas encore d'évaluation
- L'automobile Et Le HDI (Rampe Commune)Document11 pagesL'automobile Et Le HDI (Rampe Commune)ibrahim rabbajPas encore d'évaluation
- SystemeHDl 1Document58 pagesSystemeHDl 1Momo TlmsmohPas encore d'évaluation
- Injection Directe Diesel Isep 2Document21 pagesInjection Directe Diesel Isep 2Mbaye ndaoPas encore d'évaluation
- La petite graine d'un Grand Groupe: Le projet GEPY (Gestion Electricité Postale Yvelines)D'EverandLa petite graine d'un Grand Groupe: Le projet GEPY (Gestion Electricité Postale Yvelines)Pas encore d'évaluation
- Chapitre 1 Les Capteurs Partie 2Document42 pagesChapitre 1 Les Capteurs Partie 2Abdelhadi AZPas encore d'évaluation
- TP2Document1 pageTP2Abdelhadi AZPas encore d'évaluation
- TP1Document2 pagesTP1Abdelhadi AZPas encore d'évaluation
- TP3CDocument1 pageTP3CAbdelhadi AZPas encore d'évaluation
- Partie 1: Contrôler La Position D'un Servomoteur Avec PotentiomètreDocument4 pagesPartie 1: Contrôler La Position D'un Servomoteur Avec PotentiomètreAbdelhadi AZPas encore d'évaluation
- Exercice 1: Thermistance IiiDocument7 pagesExercice 1: Thermistance IiiAbdelhadi AZPas encore d'évaluation
- Chapitre 1Document6 pagesChapitre 1Abdelhadi AZPas encore d'évaluation
- Variation de Vitesse D'un Moteur À Courant Continu: ObjectifDocument2 pagesVariation de Vitesse D'un Moteur À Courant Continu: ObjectifAbdelhadi AZPas encore d'évaluation
- TP 1: Fonctions Printf & Scanf IiiDocument1 pageTP 1: Fonctions Printf & Scanf IiiAbdelhadi AZ0% (1)
- Perfectionnez-Vous Dans La Programmation Arduino: Utiliser Le Moniteur Série en Entrée Et SortieDocument10 pagesPerfectionnez-Vous Dans La Programmation Arduino: Utiliser Le Moniteur Série en Entrée Et SortieAbdelhadi AZPas encore d'évaluation
- Brochure GEDocument15 pagesBrochure GEAbdelhadi AZPas encore d'évaluation
- ENT-Maketing OperationnelDocument74 pagesENT-Maketing OperationnelAbdelhadi AZPas encore d'évaluation
- Controle FinalDocument4 pagesControle FinalAbdelhadi AZPas encore d'évaluation
- CH 3 - Cablage Des APIDocument3 pagesCH 3 - Cablage Des APIAbdelhadi AZPas encore d'évaluation
- CH 1 - Api PDFDocument4 pagesCH 1 - Api PDFAbdelhadi AZPas encore d'évaluation
- CH 1 - Api PDFDocument4 pagesCH 1 - Api PDFAbdelhadi AZPas encore d'évaluation
- Perfectionnez-Vous Dans La Programmation Arduino: Générez Des SonsDocument13 pagesPerfectionnez-Vous Dans La Programmation Arduino: Générez Des SonsAbdelhadi AZPas encore d'évaluation
- Slci Erreurs CourantesDocument11 pagesSlci Erreurs CourantesAbdelhadi AZPas encore d'évaluation
- Perfectionnez-Vous Dans La Programmation Arduino: Codez Et Décodez Des InformationsDocument12 pagesPerfectionnez-Vous Dans La Programmation Arduino: Codez Et Décodez Des InformationsAbdelhadi AZPas encore d'évaluation
- Programmez Vos Premiers Montages Avec Arduino: Le Moteur À Courant Continu (Partie 1) : Transistors Et Sorties PWMDocument19 pagesProgrammez Vos Premiers Montages Avec Arduino: Le Moteur À Courant Continu (Partie 1) : Transistors Et Sorties PWMAbdelhadi AZPas encore d'évaluation
- Perfectionnez-Vous Dans La Programmation Arduino: Utilisez Un Shield Moteur (2/2)Document7 pagesPerfectionnez-Vous Dans La Programmation Arduino: Utilisez Un Shield Moteur (2/2)Abdelhadi AZPas encore d'évaluation
- Perfectionnez-Vous Dans La Programmation Arduino: Concevez Des Matrices de LedDocument13 pagesPerfectionnez-Vous Dans La Programmation Arduino: Concevez Des Matrices de LedAbdelhadi AZPas encore d'évaluation
- Programmez Vos Premiers Montages Avec ArduinoDocument17 pagesProgrammez Vos Premiers Montages Avec ArduinoAbdelhadi AZPas encore d'évaluation
- Perfectionnez-Vous Dans La Programmation Arduino: Découvrez Les Principes Mécaniques Des Robots AutonomesDocument14 pagesPerfectionnez-Vous Dans La Programmation Arduino: Découvrez Les Principes Mécaniques Des Robots AutonomesAbdelhadi AZPas encore d'évaluation
- Programmez Vos Premiers Montages Avec ArduinoDocument18 pagesProgrammez Vos Premiers Montages Avec ArduinoAbdelhadi AZPas encore d'évaluation
- AsservissementDocument16 pagesAsservissementAbdelhadi AZPas encore d'évaluation
- Programmez Vos Premiers Montages Avec Arduino: Les Capteurs ÉlectroniquesDocument21 pagesProgrammez Vos Premiers Montages Avec Arduino: Les Capteurs ÉlectroniquesAbdelhadi AZPas encore d'évaluation
- CI24 Modelisation Experimentale Ordre 1 Et 2Document4 pagesCI24 Modelisation Experimentale Ordre 1 Et 2Abdelhadi AZPas encore d'évaluation
- 2019 Normal SoirDocument9 pages2019 Normal SoirAbdelhadi AZPas encore d'évaluation
- CI24 Distrib Aliments Chévres Asserv CCP2007Document4 pagesCI24 Distrib Aliments Chévres Asserv CCP2007Abdelhadi AZPas encore d'évaluation
- Chapitre 5-Signature NumériqueDocument4 pagesChapitre 5-Signature NumériqueDO UAPas encore d'évaluation
- Cours TGDocument45 pagesCours TGRadia GanaPas encore d'évaluation
- Evaluation Des Gains Dans Les Systèmes de Communication OptiqueDocument35 pagesEvaluation Des Gains Dans Les Systèmes de Communication OptiqueMichel GwosPas encore d'évaluation
- Devoir M1 MathDocument1 pageDevoir M1 MathSolene TsinaPas encore d'évaluation
- Chapitre 2-2Document15 pagesChapitre 2-2Reda BachnouPas encore d'évaluation
- Draft Charte Graphique Pdl-145Document22 pagesDraft Charte Graphique Pdl-145damien batobaPas encore d'évaluation
- Inbound MarketingDocument13 pagesInbound MarketingPaweł SajdekPas encore d'évaluation
- Iso 14539Document42 pagesIso 14539David SouthgatePas encore d'évaluation
- Corr td1 PDFDocument3 pagesCorr td1 PDFBlewoussiPas encore d'évaluation
- Correction Emd MR 2017 2018Document4 pagesCorrection Emd MR 2017 2018Benlouanas KamelPas encore d'évaluation
- Cellule - Ultra - Cours PDFDocument6 pagesCellule - Ultra - Cours PDFAdaPas encore d'évaluation
- MCC Ing Cycle Preparatoire IntegreeDocument2 pagesMCC Ing Cycle Preparatoire IntegreeNadia Ait AhmedPas encore d'évaluation
- MC1.06 Metallurgie Generale Et Choix Des Materiaux 3jDocument1 pageMC1.06 Metallurgie Generale Et Choix Des Materiaux 3jGuillaumePas encore d'évaluation
- TS 019m 184 (OA4 ROUHIA TE2S 2ID)Document69 pagesTS 019m 184 (OA4 ROUHIA TE2S 2ID)jawhar eddine boukhrisPas encore d'évaluation
- EXA AutoDocument6 pagesEXA Autoقرين لطفيPas encore d'évaluation
- Iec 60372Document46 pagesIec 60372Luis Andres Pradenas FuentesPas encore d'évaluation
- Exercices Correction Théorème de Pythagore 4èmeDocument3 pagesExercices Correction Théorème de Pythagore 4èmehaquenne.laurentPas encore d'évaluation
- Exercices D'algorithmique CorrigésDocument7 pagesExercices D'algorithmique Corrigésmaroua meskinePas encore d'évaluation
- Armorial Et Nobiliaire de L'ancien (... ) Foras Amédée Bpt6k65767241Document377 pagesArmorial Et Nobiliaire de L'ancien (... ) Foras Amédée Bpt6k65767241maza_poulppyPas encore d'évaluation
- Weber Le Savant Et Le Politique (Annotations)Document1 pageWeber Le Savant Et Le Politique (Annotations)bilou11070% (1)
- Programme Séminaire UCESIF Bucarest, 13 - 14 Mai 2013Document24 pagesProgramme Séminaire UCESIF Bucarest, 13 - 14 Mai 2013Victor CozmeiPas encore d'évaluation
- NCT Memento Rinaldo v2Document15 pagesNCT Memento Rinaldo v2Manmzel RaphaPas encore d'évaluation
- Note Technique de La Voie D'acces Principlae VFDocument21 pagesNote Technique de La Voie D'acces Principlae VFSanaaPas encore d'évaluation
- Uca2 1 1aDocument3 pagesUca2 1 1aMariePas encore d'évaluation
- Etude Et Conception D'une Centrale A BetonDocument60 pagesEtude Et Conception D'une Centrale A Betonjihenk100% (14)
- Glenn Murcutt - CompressedDocument12 pagesGlenn Murcutt - CompressedpianoPas encore d'évaluation
- Elasticité Chapitre 6Document21 pagesElasticité Chapitre 6Anis LepicPas encore d'évaluation
- Le Zodiaque de Dendérah (Réparé)Document40 pagesLe Zodiaque de Dendérah (Réparé)marion100% (1)
- Mobilite InternationaleDocument2 pagesMobilite Internationalevettielle vettiellePas encore d'évaluation
- 293 Conception de La Commande de Processus PopescuDocument295 pages293 Conception de La Commande de Processus PopescuSteve DemirelPas encore d'évaluation