Vous aimerez peut-être aussi
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Polycopie ElectroniquedepuissanceDocument69 pagesPolycopie ElectroniquedepuissanceSalim BouaziziPas encore d'évaluation
- Milieux PoreuxDocument12 pagesMilieux PoreuxmhandLGARMOUCH100% (1)
- Sae Cours Bokovi PDFDocument74 pagesSae Cours Bokovi PDFPALOUKI100% (2)
- Calcul StochastiqueDocument104 pagesCalcul StochastiqueCarolyn Matthews100% (1)
- Fiabilitex - PDF FiabilitéDocument10 pagesFiabilitex - PDF FiabilitéLarbi Elbakkali100% (1)
- Adsorption PDFDocument20 pagesAdsorption PDFYacinePas encore d'évaluation
- TD Auto Asservissement Echantillonne L3EMDocument3 pagesTD Auto Asservissement Echantillonne L3EMSanhouidi StephanePas encore d'évaluation
- 2 Encastrement Cours PDFDocument7 pages2 Encastrement Cours PDFLarbi ElbakkaliPas encore d'évaluation
- Schéma Équivalent Et Caractéristique Mécanique Du Moteur AsynchroneDocument9 pagesSchéma Équivalent Et Caractéristique Mécanique Du Moteur Asynchroneعبد الله هادي القرطبيPas encore d'évaluation
- Asservissement Numérique: Réponse Des Systèmes À Temps Discret Systeme D'ordre 1 Chapitre 3Document20 pagesAsservissement Numérique: Réponse Des Systèmes À Temps Discret Systeme D'ordre 1 Chapitre 3Radouan RadwanPas encore d'évaluation
- Asservissement Échantillonné PDFDocument79 pagesAsservissement Échantillonné PDFFabrice FotsoPas encore d'évaluation
- Document Réponse TP2 PID - Num 2022 - 2023Document10 pagesDocument Réponse TP2 PID - Num 2022 - 2023Zerrouk AthmanPas encore d'évaluation
- Poly TD-Regul NumDocument12 pagesPoly TD-Regul NumIslam BensediraPas encore d'évaluation
- Chapitre 2 Fonction Detransfert Et Asservissement Echantillonne-Zidani FatihaDocument18 pagesChapitre 2 Fonction Detransfert Et Asservissement Echantillonne-Zidani FatihaOumaymaPas encore d'évaluation
- TD CNSDocument3 pagesTD CNSHim Ibrah100% (1)
- CapteurDocument4 pagesCapteuryasser kingPas encore d'évaluation
- Chap 08Document62 pagesChap 08towfeakPas encore d'évaluation
- Correction SystemesDocument29 pagesCorrection SystemesredaPas encore d'évaluation
- TD2 Phy323Document2 pagesTD2 Phy323CedricPas encore d'évaluation
- TD Correction Modélisation Et Indentification Des SysDocument6 pagesTD Correction Modélisation Et Indentification Des SysstealthxeonPas encore d'évaluation
- Examen2020 SAEDocument1 pageExamen2020 SAEsami BoumendjelPas encore d'évaluation
- TD-Alternatif Et PuissanceDocument24 pagesTD-Alternatif Et PuissanceBakr IbrahimiPas encore d'évaluation
- Chapitre IIDocument24 pagesChapitre IIYasmine HammamiPas encore d'évaluation
- Flux D Induction Magnetique PDFDocument3 pagesFlux D Induction Magnetique PDFlecox100% (1)
- Travaux Dirigés Régulation Ind. 21Document54 pagesTravaux Dirigés Régulation Ind. 21Amina LazregPas encore d'évaluation
- Simulation Additionneur Soustracteur LtspiceDocument13 pagesSimulation Additionneur Soustracteur LtspiceHamza BoutlihPas encore d'évaluation
- Initiation À MATLAB: 1. Généralités 1.1. Accès À MatlabDocument14 pagesInitiation À MATLAB: 1. Généralités 1.1. Accès À MatlabIguejdi Lahcen100% (1)
- Fichier Fascicule TPDocument16 pagesFichier Fascicule TPorg 2019Pas encore d'évaluation
- TD Filtres PDFDocument2 pagesTD Filtres PDFbenhasamPas encore d'évaluation
- Réponse Temporelles Et Correction Des Système AsservisDocument10 pagesRéponse Temporelles Et Correction Des Système Asserviskima lachgarPas encore d'évaluation
- Chapitre 5-Synthèse Des Systèmes AsservisDocument19 pagesChapitre 5-Synthèse Des Systèmes AsservisIbtissem DERRARPas encore d'évaluation
- 5385 B 108129 DDDocument5 pages5385 B 108129 DDImmamHadramy100% (1)
- ContrôleDocument10 pagesContrôleHassan Guenzaouz0% (1)
- VcoDocument7 pagesVcoGuez YoPas encore d'évaluation
- Chap8 Aut Log Vol3 v2Document19 pagesChap8 Aut Log Vol3 v2Phoe NixPas encore d'évaluation
- Cours Asservissements PDFDocument67 pagesCours Asservissements PDFMohamed OubellaPas encore d'évaluation
- Méthode Plan PhaseDocument11 pagesMéthode Plan PhaseSoltani MarwaPas encore d'évaluation
- Analyse Temporelle D'un Systeme Dynamique Du 1er OrdreDocument5 pagesAnalyse Temporelle D'un Systeme Dynamique Du 1er OrdreKamal Ghe100% (1)
- 5-Facteur de Qualite Et Ciecuit ResonnantDocument9 pages5-Facteur de Qualite Et Ciecuit ResonnantAFAFPas encore d'évaluation
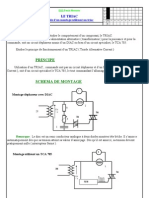
- TRIACDocument3 pagesTRIACMustapha BeziouiPas encore d'évaluation
- Chapitre 3 Filtrage Signaux Deterministes Temps ContinuDocument7 pagesChapitre 3 Filtrage Signaux Deterministes Temps Continuarbaoui11Pas encore d'évaluation
- TP SechDocument5 pagesTP SechNajib BaddouPas encore d'évaluation
- TP 1Document2 pagesTP 1Khaled LahianiPas encore d'évaluation
- Chapitre 2 - SNL - Plan de PhaseDocument9 pagesChapitre 2 - SNL - Plan de PhaseFe ThiPas encore d'évaluation
- Le GRAFCETDocument146 pagesLe GRAFCETYorrick Valquin NgouyouPas encore d'évaluation
- Boteuil de Gaz PDFDocument66 pagesBoteuil de Gaz PDF10babilionPas encore d'évaluation
- Gestion D'un Feu TricoloreDocument9 pagesGestion D'un Feu TricolorelfadliPas encore d'évaluation
- Bascules Exos PDFDocument2 pagesBascules Exos PDFbenhasamPas encore d'évaluation
- TD1 OnduleursDocument2 pagesTD1 OnduleurssofianePas encore d'évaluation
- Chapitre 1 PDFDocument14 pagesChapitre 1 PDFHadil SellamiPas encore d'évaluation
- TP1 Systemes AsservisDocument4 pagesTP1 Systemes AsservisInventorمخترع GamerSالالعابPas encore d'évaluation
- TP Logique Fhloue ENNASSIRI HamzaDocument8 pagesTP Logique Fhloue ENNASSIRI HamzaHamza ENNASSIRIPas encore d'évaluation
- TP1 Electronique AppliqueeDocument10 pagesTP1 Electronique Appliqueeguellal mariaPas encore d'évaluation
- Chapitre 4 Calcul Chute Tension Montage Redresseur PDFDocument9 pagesChapitre 4 Calcul Chute Tension Montage Redresseur PDFMohamed ElmahdiPas encore d'évaluation
- Cours SALC ch3Document8 pagesCours SALC ch3Sissy carburePas encore d'évaluation
- Enoncetd 4Document4 pagesEnoncetd 4MichelPas encore d'évaluation
- TD Régulation Et Asservissement 2Document5 pagesTD Régulation Et Asservissement 2Ilyess HamdiPas encore d'évaluation
- Compte Rendu TP 1.seifDocument8 pagesCompte Rendu TP 1.seifSeif GuetitiPas encore d'évaluation
- DM 1S 1ere Partie Corrige PDFDocument6 pagesDM 1S 1ere Partie Corrige PDFhamzaPas encore d'évaluation
- TP4-DE-LCS ChelloufDocument9 pagesTP4-DE-LCS ChelloufIslam CHELLOUF100% (1)
- Chap - 02 - Transmittances Des Systèmes ÉchantillonnésDocument44 pagesChap - 02 - Transmittances Des Systèmes ÉchantillonnésToutou KHATRIPas encore d'évaluation
- 2015 04 19 TD2Document7 pages2015 04 19 TD2Larbi Elbakkali100% (1)
- Annales Concours Tsa Tseeac 2016 LiaisonsDocument71 pagesAnnales Concours Tsa Tseeac 2016 LiaisonsLarbi ElbakkaliPas encore d'évaluation
- Descriptif Du Module BoussouisDocument4 pagesDescriptif Du Module BoussouisLarbi ElbakkaliPas encore d'évaluation
- 9 1 TD 1 Sujet HydrauliqueDocument3 pages9 1 TD 1 Sujet HydrauliqueLarbi Elbakkali50% (2)
- 17 2 CastiglianoDocument2 pages17 2 CastiglianoLarbi ElbakkaliPas encore d'évaluation
- El HaddadDocument5 pagesEl HaddadLarbi ElbakkaliPas encore d'évaluation
- La Mécatronique Est La RobotiqueDocument1 pageLa Mécatronique Est La RobotiqueLarbi ElbakkaliPas encore d'évaluation
- Chapitre 3 Schemas FonctionnelsDocument6 pagesChapitre 3 Schemas FonctionnelsLarbi ElbakkaliPas encore d'évaluation
- Chapitre 2 Transformee de LaplaceDocument6 pagesChapitre 2 Transformee de LaplaceLarbi ElbakkaliPas encore d'évaluation
- Chapitre 4 Graphes de FluenceDocument4 pagesChapitre 4 Graphes de FluenceLarbi Elbakkali100% (1)
- 1 Encastrement CoursDocument8 pages1 Encastrement CoursLarbi ElbakkaliPas encore d'évaluation
- FICHE SYNTETIQUE de LA FORMATION-Métiers de L'industrie Mécatronique Et RobotiqueDocument2 pagesFICHE SYNTETIQUE de LA FORMATION-Métiers de L'industrie Mécatronique Et RobotiqueLarbi ElbakkaliPas encore d'évaluation
- Sujet 2Document11 pagesSujet 2Larbi ElbakkaliPas encore d'évaluation
- Chapitre 3 Programmation Iso PDFDocument17 pagesChapitre 3 Programmation Iso PDFLarbi ElbakkaliPas encore d'évaluation
- Chapitre 4 Cycles Programmation TournageDocument9 pagesChapitre 4 Cycles Programmation TournageLarbi ElbakkaliPas encore d'évaluation
- Manuel Du Module Additionnel RF-STEEL EC3 Du Logiciel RFEMDocument91 pagesManuel Du Module Additionnel RF-STEEL EC3 Du Logiciel RFEMGrégoire DupontPas encore d'évaluation
- Resum Eq DiffDocument5 pagesResum Eq Diffalibabamm79Pas encore d'évaluation
- Batiss Securite Incendie IT246Document11 pagesBatiss Securite Incendie IT246Boudaoud SalahPas encore d'évaluation
- These Karabadji Nour El IslemDocument165 pagesThese Karabadji Nour El IslemSaida GharbiPas encore d'évaluation
- TP N°4 2022Document3 pagesTP N°4 2022Khouloud Ghalima0% (1)
- EffetsDocument16 pagesEffetskhalid.fezzaziPas encore d'évaluation
- Td2 Electronic-Num Elhanaoui FSTEDocument2 pagesTd2 Electronic-Num Elhanaoui FSTEtariqPas encore d'évaluation
- Serie D'exercices No1 - Correction-Exercice 2Document18 pagesSerie D'exercices No1 - Correction-Exercice 2Aymen GuizaniPas encore d'évaluation
- PDM2 Guide Corrige Vrac Cahier Chap6Document16 pagesPDM2 Guide Corrige Vrac Cahier Chap6Youssef AbadaPas encore d'évaluation
- Corrigé Analyse NumériqueDocument5 pagesCorrigé Analyse NumériqueOlabiyi ELEGBEDEPas encore d'évaluation
- Belhadj AbdellahDocument87 pagesBelhadj AbdellahMohamed EL hadegPas encore d'évaluation
- H InfinieDocument11 pagesH InfinieSmati DjamelPas encore d'évaluation
- Logique td12 PDFDocument2 pagesLogique td12 PDFNoupa mike mikePas encore d'évaluation
- °COURS Structures de Données en C FPODocument161 pages°COURS Structures de Données en C FPOosskd096Pas encore d'évaluation
- 05 - Fiche PIC18 Modules CCP PDFDocument6 pages05 - Fiche PIC18 Modules CCP PDFHamza RafikPas encore d'évaluation
- DZDDocument196 pagesDZDAZEDDINEPas encore d'évaluation
- Synthèse Des Travaux Présentée À L'université Paris-Sud - Paris SaclayDocument114 pagesSynthèse Des Travaux Présentée À L'université Paris-Sud - Paris SaclayDenise SciammarellaPas encore d'évaluation
- Optimisation Par La Méthode de NewtonDocument7 pagesOptimisation Par La Méthode de NewtonAlgerie CyrusPas encore d'évaluation
- DauphinDocument48 pagesDauphinAnas KertyPas encore d'évaluation
- Introduction Au PLSQL OracleDocument79 pagesIntroduction Au PLSQL Oraclemechanical79Pas encore d'évaluation
- TD Structure de Données EtudiantDocument4 pagesTD Structure de Données Etudiantismael BakayokoPas encore d'évaluation
- QCM Analyse ESTDocument4 pagesQCM Analyse ESTJames OptimistePas encore d'évaluation
- GaloisDocument51 pagesGaloisfamboveronald8Pas encore d'évaluation
- SERIE Le Bac en PocheDocument11 pagesSERIE Le Bac en Pochekhybp757z5Pas encore d'évaluation
- 4 0 - Borne Reglable PDFDocument2 pages4 0 - Borne Reglable PDFhamza daizPas encore d'évaluation
- La CooperationDocument12 pagesLa CooperationAndreeaMariaPas encore d'évaluation
- Chapitre 4 Lalgèbre de Boole BinaireDocument60 pagesChapitre 4 Lalgèbre de Boole Binairesoraya.gouderPas encore d'évaluation