Vous aimerez peut-être aussi
- Chute Libre VerticaleDocument2 pagesChute Libre VerticalesigaussePas encore d'évaluation
- Les Mouvements PlanaireDocument6 pagesLes Mouvements PlanaireAbdolilahe EssaPas encore d'évaluation
- Contrôle 2Document3 pagesContrôle 2Mery EmPas encore d'évaluation
- On Se Propose D'étudier Le Mouvement de La Chute Verticale, Avec Frottement Fluide, Dans Un Liquide Visqueux D'une Bille Homogène de Masse MDocument1 pageOn Se Propose D'étudier Le Mouvement de La Chute Verticale, Avec Frottement Fluide, Dans Un Liquide Visqueux D'une Bille Homogène de Masse MMohamed MazighPas encore d'évaluation
- 1 - Cours de Projectilie 2017Document4 pages1 - Cours de Projectilie 2017Stachis's LightPas encore d'évaluation
- La Gravitation Universelle Resume de Cours 2Document2 pagesLa Gravitation Universelle Resume de Cours 2ZoujKooraPas encore d'évaluation
- Série 2 - Cinématique Et Dynamique Du PointDocument4 pagesSérie 2 - Cinématique Et Dynamique Du PointDjm AlgPas encore d'évaluation
- Examen National Physique Chimie SPC 2019 Normale Corrige 3Document6 pagesExamen National Physique Chimie SPC 2019 Normale Corrige 3hicham lahdissouPas encore d'évaluation
- 09 - La Propagation D'une Onde Sinusoïdale EntretenueDocument7 pages09 - La Propagation D'une Onde Sinusoïdale EntretenuedaddouPas encore d'évaluation
- Chute Verticale D Un SolideDocument2 pagesChute Verticale D Un Solidehakima032Pas encore d'évaluation
- Série D'exercices - Cinématique - Ts - SunudaaraDocument5 pagesSérie D'exercices - Cinématique - Ts - SunudaaraJule BaPas encore d'évaluation
- Presentation Des OndesDocument26 pagesPresentation Des OndesKiadam Kitou100% (1)
- Series Ondes LumineusesDocument4 pagesSeries Ondes LumineusesMoulayMoulyPas encore d'évaluation
- Physique Chimie 2eme Bac Evaluation Diagnostique 3Document5 pagesPhysique Chimie 2eme Bac Evaluation Diagnostique 3Ťăhã ÊìîPas encore d'évaluation
- Serie Dexercices N8 Lycee Pilote - Physique - DYNAMIQUE - 3eme Sciences 2015-2016 MR MABROUKI SALAHDocument7 pagesSerie Dexercices N8 Lycee Pilote - Physique - DYNAMIQUE - 3eme Sciences 2015-2016 MR MABROUKI SALAHRaslen MelkiPas encore d'évaluation
- C9Phy Mecanique de Newton PDFDocument2 pagesC9Phy Mecanique de Newton PDFAzizElheniPas encore d'évaluation
- Exercices PC 2bac SP International FR 20 1 PDFDocument6 pagesExercices PC 2bac SP International FR 20 1 PDFLahdar AyoubPas encore d'évaluation
- Série D'Exercice 1 Le Mouvement de Rotation PDFDocument1 pageSérie D'Exercice 1 Le Mouvement de Rotation PDFMed MattaPas encore d'évaluation
- Cours 2018 - 2019Document4 pagesCours 2018 - 2019mohamed laghribPas encore d'évaluation
- Adobe Scan 11 Apr 2022Document2 pagesAdobe Scan 11 Apr 2022Yassir ZahidiPas encore d'évaluation
- Fascicule de TP 4ème Année 100 Pages Pour Toutes Les Sections Pour Toute L'année ScolaireDocument101 pagesFascicule de TP 4ème Année 100 Pages Pour Toutes Les Sections Pour Toute L'année ScolairekilanibenPas encore d'évaluation
- Suite Chute LibreDocument9 pagesSuite Chute Libretamersamira80Pas encore d'évaluation
- Méca C1 Cor TD Ex-1-Et-4Document2 pagesMéca C1 Cor TD Ex-1-Et-4Med yahyaPas encore d'évaluation
- La Gravitation Universelle Cours 1Document6 pagesLa Gravitation Universelle Cours 1noureddine100% (1)
- Travail Et Energie Cinetique Exercices Non Corriges 7Document3 pagesTravail Et Energie Cinetique Exercices Non Corriges 7Papa SallPas encore d'évaluation
- Devoir de Contrôle N°1 - Physique - Bac Math (2010-2011) MR RaoufDocument5 pagesDevoir de Contrôle N°1 - Physique - Bac Math (2010-2011) MR Raoufahmed tounsiPas encore d'évaluation
- TP10bis CorrectionDocument10 pagesTP10bis Correctionsam kunPas encore d'évaluation
- Cours Lycée Pilote - Chimie - Bac Sciences Exp (2011-2012) MR Sfaxi SalahDocument6 pagesCours Lycée Pilote - Chimie - Bac Sciences Exp (2011-2012) MR Sfaxi SalahMouf55100% (1)
- EnergiecinetiqueDocument24 pagesEnergiecinetiqueAmoula HayatiePas encore d'évaluation
- Exercice (Induction - Auto Induction) PDFDocument6 pagesExercice (Induction - Auto Induction) PDFhonoka flowerPas encore d'évaluation
- Mouvement Particule Chargée MagnétiqueDocument6 pagesMouvement Particule Chargée Magnétiqueالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- Dipole RL Prof - Sbiro (WWW - Pc1.ma)Document5 pagesDipole RL Prof - Sbiro (WWW - Pc1.ma)lahcen essPas encore d'évaluation
- Cours Dynamique Des StructuresDocument2 pagesCours Dynamique Des StructuresAbderrahim Boulanouar100% (1)
- TSP1SP2Ch6T3-Exo p174 n15 CorrectionDocument1 pageTSP1SP2Ch6T3-Exo p174 n15 CorrectionCheujeu chaldouPas encore d'évaluation
- Mouvement Dans Un Champ Uniforme - Exercices - Devoirs: Exercice 1Document9 pagesMouvement Dans Un Champ Uniforme - Exercices - Devoirs: Exercice 1Amine AlaoUii Alaoui100% (1)
- DEVOIR 2 Lancer - Dans - Le - TubeDocument3 pagesDEVOIR 2 Lancer - Dans - Le - Tubemerainifarah2100% (1)
- Phy 3Document13 pagesPhy 3Yassir Rochd100% (1)
- Série Ec - RFD PlateformeDocument2 pagesSérie Ec - RFD PlateformeBakari AnisPas encore d'évaluation
- C12Phy - Systemes - Oscillants - Pendule - Exos - Galilee PDFDocument4 pagesC12Phy - Systemes - Oscillants - Pendule - Exos - Galilee PDFAzizElheniPas encore d'évaluation
- Cours - Physique - Mecanique Forcé - Bac Mathématiques (2016-2017) MR Afdal AliDocument4 pagesCours - Physique - Mecanique Forcé - Bac Mathématiques (2016-2017) MR Afdal AliLotfi HammamiPas encore d'évaluation
- Ondes Mecaniques Progressives Periodiques Cours 3 2Document6 pagesOndes Mecaniques Progressives Periodiques Cours 3 2Ťăhã ÊìîPas encore d'évaluation
- TD4 Travail Et ÉnergieDocument4 pagesTD4 Travail Et Énergiekonrmj.218Pas encore d'évaluation
- Controle2 Partie 2 2022ههDocument4 pagesControle2 Partie 2 2022ههMouhibi Abdellah100% (1)
- TP14 Travail D'une Force EC2021Document4 pagesTP14 Travail D'une Force EC2021Maxime DecouvelaerePas encore d'évaluation
- C13Phy Aspects Energetiques PDFDocument4 pagesC13Phy Aspects Energetiques PDFAzizElheniPas encore d'évaluation
- Devoir N°2 Type 3 S1 - 1bacDocument2 pagesDevoir N°2 Type 3 S1 - 1bacخديجة بنزينب100% (1)
- CHP 1 Lois de NewtonDocument11 pagesCHP 1 Lois de NewtonSaad Filali Oujdi100% (1)
- C13Phy - Aspects - Energetiques - Exos - EcEpEm PDFDocument6 pagesC13Phy - Aspects - Energetiques - Exos - EcEpEm PDFAzizElheniPas encore d'évaluation
- ds1 PCDocument4 pagesds1 PCFATIMA fatiiiPas encore d'évaluation
- 2ème SM Les Oscillateurs MécaniquesDocument9 pages2ème SM Les Oscillateurs MécaniquesAmine HamdaouiPas encore d'évaluation
- Série N°1 Cinématique de Translation 1 2010 2011 (Boussada Atef)Document2 pagesSérie N°1 Cinématique de Translation 1 2010 2011 (Boussada Atef)Malek Berrgueb100% (1)
- Série D'exercice 3 Electricite Et Acide Base-1Document11 pagesSérie D'exercice 3 Electricite Et Acide Base-1Mohamed MéknPas encore d'évaluation
- Examen National Physique Chimie Sciences Maths 2018 Normale Sujet PDFDocument8 pagesExamen National Physique Chimie Sciences Maths 2018 Normale Sujet PDFel ghazi benrrabhiPas encore d'évaluation
- Devoir 1 BiofDocument3 pagesDevoir 1 BiofSABOUR MOHAMMEDPas encore d'évaluation
- 1bac SM Biof Exercice (1) Energie Cinetique Poulie Youtube 02-01-2022Document2 pages1bac SM Biof Exercice (1) Energie Cinetique Poulie Youtube 02-01-2022Rachid LatrachPas encore d'évaluation
- Cours Lycée Pilote - Physique - Mouvement Rectilignes - 3ème Sciences Exp (2015-2016) MR Rmili SaidDocument12 pagesCours Lycée Pilote - Physique - Mouvement Rectilignes - 3ème Sciences Exp (2015-2016) MR Rmili SaidKhalilGhenimiPas encore d'évaluation
- TD Dynamique 2023 LSLL WahabdiopDocument4 pagesTD Dynamique 2023 LSLL WahabdiopAbsa NdiayePas encore d'évaluation
- 63ffbb3081306 - Exercices Ondes Progressives M 0303 2023Document5 pages63ffbb3081306 - Exercices Ondes Progressives M 0303 2023Boruto UzumakiPas encore d'évaluation
- Compo I 2nde S LANL 14-15Document2 pagesCompo I 2nde S LANL 14-15Doro Cissé100% (1)
- Mouvement Dans Un Champ UniformeDocument9 pagesMouvement Dans Un Champ UniformeDavidsonPas encore d'évaluation
- Fiche Aec CP1Document38 pagesFiche Aec CP1Dieu Est Fidèle100% (1)
- 5 EDHC CP1 (L1à L25) OKDocument28 pages5 EDHC CP1 (L1à L25) OKDieu Est FidèlePas encore d'évaluation
- DEVOIR 6è3Document1 pageDEVOIR 6è3Dieu Est FidèlePas encore d'évaluation
- DEVOIR DE MATHEMATIQUES 6eDocument2 pagesDEVOIR DE MATHEMATIQUES 6eDieu Est FidèlePas encore d'évaluation
- EPS CP1 NouvDocument51 pagesEPS CP1 NouvDieu Est FidèlePas encore d'évaluation
- Histoire Ce1Document64 pagesHistoire Ce1Dieu Est FidèlePas encore d'évaluation
- Ecriture CP-1Document2 pagesEcriture CP-1Dieu Est FidèlePas encore d'évaluation
- Exploitation de Texte 1-2Document3 pagesExploitation de Texte 1-2Dieu Est FidèlePas encore d'évaluation
- 2 LANG CP1 (2017) OkDocument167 pages2 LANG CP1 (2017) OkDieu Est FidèlePas encore d'évaluation
- Geogr Ce1Document42 pagesGeogr Ce1Dieu Est FidèlePas encore d'évaluation
- Expression Orale Ce1Document76 pagesExpression Orale Ce1Dieu Est FidèlePas encore d'évaluation
- Exploitation Texte 1 Ce1Document50 pagesExploitation Texte 1 Ce1Dieu Est FidèlePas encore d'évaluation
- Expression Ecrite Ce1Document83 pagesExpression Ecrite Ce1Dieu Est FidèlePas encore d'évaluation
- Eps Ce1Document36 pagesEps Ce1Dieu Est FidèlePas encore d'évaluation
- Exploitation de Texte 2 Ce1Document50 pagesExploitation de Texte 2 Ce1Dieu Est FidèlePas encore d'évaluation
- Aec Ce1Document42 pagesAec Ce1Dieu Est FidèlePas encore d'évaluation
- Edhc Ce1Document80 pagesEdhc Ce1Dieu Est FidèlePas encore d'évaluation
- Exploitation de Texte 1-2Document3 pagesExploitation de Texte 1-2Dieu Est FidèlePas encore d'évaluation
- Exploitation de Texte 1-2Document3 pagesExploitation de Texte 1-2Dieu Est FidèlePas encore d'évaluation
- Exploitation de Texte 1-2Document3 pagesExploitation de Texte 1-2Dieu Est FidèlePas encore d'évaluation
- Les Travaux DomestiquesDocument7 pagesLes Travaux DomestiquesDieu Est FidèlePas encore d'évaluation
- La Fabrication de JouetsDocument7 pagesLa Fabrication de JouetsDieu Est FidèlePas encore d'évaluation
- Exploitation de Texte 1-2Document3 pagesExploitation de Texte 1-2Dieu Est Fidèle100% (1)
- Exploitation de Texte 1-2Document3 pagesExploitation de Texte 1-2Dieu Est FidèlePas encore d'évaluation
- Exploitation de Texte 1-2Document3 pagesExploitation de Texte 1-2Dieu Est FidèlePas encore d'évaluation
- L'utilisation Rationnelle de L'eauDocument7 pagesL'utilisation Rationnelle de L'eauDieu Est FidèlePas encore d'évaluation
- Une Vie Paisible Avec Les AutresDocument7 pagesUne Vie Paisible Avec Les AutresDieu Est FidèlePas encore d'évaluation
- Le DessinDocument7 pagesLe DessinDieu Est FidèlePas encore d'évaluation
- Un Match de FootballDocument7 pagesUn Match de FootballDieu Est FidèlePas encore d'évaluation
- Au PortDocument7 pagesAu PortDieu Est FidèlePas encore d'évaluation
- Chap-2-Ondes de La Matière de Louis de BroglieDocument27 pagesChap-2-Ondes de La Matière de Louis de Broglieahmed lahlouPas encore d'évaluation
- Analyse Dimsionlle EXO CorrigésDocument2 pagesAnalyse Dimsionlle EXO CorrigéskaderPas encore d'évaluation
- Metallographie SDMDocument13 pagesMetallographie SDMYoucef YoucefPas encore d'évaluation
- PROB BLANC Physique P CDocument4 pagesPROB BLANC Physique P CFranck TCHEUTCHOUAPas encore d'évaluation
- Polymérisation en Émulsion GMP 18Document17 pagesPolymérisation en Émulsion GMP 18mennanesalaheddinePas encore d'évaluation
- Rapport de Stage Dans ONA TouggourtDocument20 pagesRapport de Stage Dans ONA TouggourtAmira KrimaPas encore d'évaluation
- Corrosion 2Document20 pagesCorrosion 2Abdellah El khamlichiPas encore d'évaluation
- DCN1 2022Document5 pagesDCN1 2022briki faical briki faicalPas encore d'évaluation
- Transfert Thermique Exercices04Document2 pagesTransfert Thermique Exercices04kridatimaPas encore d'évaluation
- CataloguePrepasScientifiques 2023 BD+Document32 pagesCataloguePrepasScientifiques 2023 BD+lotfi elasriPas encore d'évaluation
- MecaniqueDesFluides PDFDocument210 pagesMecaniqueDesFluides PDFSissoko Fakourou100% (1)
- Masque Respiratoire - SI Jour - 2022Document4 pagesMasque Respiratoire - SI Jour - 2022My profilePas encore d'évaluation
- TD MQ L2 2019 PDFDocument27 pagesTD MQ L2 2019 PDFLamine GuéyePas encore d'évaluation
- STDHX5000M - Analyseur de Ciments Par Fluorescence-X de Paillasse, Equipe D'un Detecteur SSD A Purge HeliumDocument3 pagesSTDHX5000M - Analyseur de Ciments Par Fluorescence-X de Paillasse, Equipe D'un Detecteur SSD A Purge HeliumFrançois VergonPas encore d'évaluation
- Mfi M1 2005Document63 pagesMfi M1 2005Ludovic ChatellierPas encore d'évaluation
- 2011 12.cours - Chapitre4.thermoDocument40 pages2011 12.cours - Chapitre4.thermohamzaPas encore d'évaluation
- Oem Dlhi 1Document7 pagesOem Dlhi 1Udei SchikhauiPas encore d'évaluation
- II-Cours Diagrammes de PhasesDocument52 pagesII-Cours Diagrammes de PhasesIBTIHAL DAILYPas encore d'évaluation
- Note de Calcul AdmDocument112 pagesNote de Calcul AdmFarah FerganiPas encore d'évaluation
- Partie 6 Chap 5 Les DosagesDocument44 pagesPartie 6 Chap 5 Les DosagesdPas encore d'évaluation
- Expose Petrole Et Gaz NaturelDocument5 pagesExpose Petrole Et Gaz NaturelFranck Arthur100% (1)
- TPE M.Daouas 2 - CopieDocument56 pagesTPE M.Daouas 2 - CopieChourouk MeskiniPas encore d'évaluation
- These CadiDocument139 pagesThese CadiHeisenberg WWPas encore d'évaluation
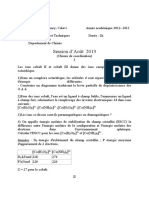
- AoutDocument2 pagesAoutBaroka julien YANEPas encore d'évaluation
- Fascicule Segpa 3eme 2018 ElectriciteDocument20 pagesFascicule Segpa 3eme 2018 ElectriciteGregory CollinPas encore d'évaluation
- Exo Type BacDocument3 pagesExo Type Baciwiw.btpPas encore d'évaluation
- CORRECTION Evaluation N°3 de Physique-Chimie: Exercice 1 - Mélange de Produits Ménagers: Attention Dangers!Document5 pagesCORRECTION Evaluation N°3 de Physique-Chimie: Exercice 1 - Mélange de Produits Ménagers: Attention Dangers!Hakimi AbderrahmanePas encore d'évaluation
- Travaux PratiqueDocument30 pagesTravaux Pratiqueيس محمدPas encore d'évaluation
- St-Fa1 Principes de La Fabrication Additive-DuoDocument2 pagesSt-Fa1 Principes de La Fabrication Additive-DuoBoussalem MeryemePas encore d'évaluation
- Exercices T2Document22 pagesExercices T2Arsene MvondoPas encore d'évaluation
- Revue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteD'EverandRevue des incompris revue d'histoire des oubliettes: Le Réveil de l'Horloge de Célestin Louis Maxime Dubuisson aliéniste et poèteÉvaluation : 3 sur 5 étoiles3/5 (3)
- Entretien clinique: Outils et techniques de diagnostic en santé mentaleD'EverandEntretien clinique: Outils et techniques de diagnostic en santé mentalePas encore d'évaluation
- Force Mentale et Maîtrise de la Discipline: Renforcez votre Confiance en vous pour Débloquer votre Courage et votre Résilience ! (Comprend un Manuel Pratique en 10 Étapes et 15 Puissants Exercices)D'EverandForce Mentale et Maîtrise de la Discipline: Renforcez votre Confiance en vous pour Débloquer votre Courage et votre Résilience ! (Comprend un Manuel Pratique en 10 Étapes et 15 Puissants Exercices)Évaluation : 4.5 sur 5 étoiles4.5/5 (28)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Le livre de la mémoire libérée : Apprenez plus vite, retenez tout avec des techniques de mémorisation simples et puissantesD'EverandLe livre de la mémoire libérée : Apprenez plus vite, retenez tout avec des techniques de mémorisation simples et puissantesÉvaluation : 4 sur 5 étoiles4/5 (6)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- 20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsD'Everand20 Véritables remèdes de nos grands-mères pour maigrir vite et enfin perdre du poidsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Améliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesD'EverandAméliorer votre mémoire: Un Guide pour l'augmentation de la puissance du cerveau, utilisant des techniques et méthodesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Hypnotisme et Magnétisme, Somnambulisme, Suggestion et Télépathie, Influence personnelle: Cours Pratique completD'EverandHypnotisme et Magnétisme, Somnambulisme, Suggestion et Télépathie, Influence personnelle: Cours Pratique completÉvaluation : 4.5 sur 5 étoiles4.5/5 (8)
- Géobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainD'EverandGéobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Coaching de vie: Manuel de bord pour coachs et coachésD'EverandCoaching de vie: Manuel de bord pour coachs et coachésPas encore d'évaluation
- L'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)D'EverandL'Art de la guerre: Traité de stratégie en 13 chapitres (texte intégral)Évaluation : 4 sur 5 étoiles4/5 (3032)
- L'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaD'EverandL'Art de La Magie au Bougie Wicca: Le Guide du Débutant à la Pratique de la Magie au Bougie de WiccaÉvaluation : 3 sur 5 étoiles3/5 (1)
- Anatomie & 100 étirements essentiels pour le running: Principes de base, Techniques, Tableaux de séries, Précautions à prendre, Conseils, Programmes d'étirementsD'EverandAnatomie & 100 étirements essentiels pour le running: Principes de base, Techniques, Tableaux de séries, Précautions à prendre, Conseils, Programmes d'étirementsPas encore d'évaluation
- Aimez-Vous en 12 Étapes Pratiques: Un Manuel pour Améliorer l'Estime de Soi, Prendre Conscience de sa Valeur, se Débarrasser du Doute et Trouver un Bonheur VéritableD'EverandAimez-Vous en 12 Étapes Pratiques: Un Manuel pour Améliorer l'Estime de Soi, Prendre Conscience de sa Valeur, se Débarrasser du Doute et Trouver un Bonheur VéritableÉvaluation : 5 sur 5 étoiles5/5 (4)
- Le TDA/H chez l'adulte: Apprendre à vivre sereinement avec son trouble de l'attentionD'EverandLe TDA/H chez l'adulte: Apprendre à vivre sereinement avec son trouble de l'attentionPas encore d'évaluation
- Émotions et intelligence émotionnelle dans les organisationsD'EverandÉmotions et intelligence émotionnelle dans les organisationsPas encore d'évaluation
- Production et propagation des sons: Les Grands Articles d'UniversalisD'EverandProduction et propagation des sons: Les Grands Articles d'UniversalisPas encore d'évaluation
- La Pensée Positive en 30 Jours: Manuel Pratique pour Penser Positivement, Former votre Critique Intérieur, Arrêter la Réflexion Excessive et Changer votre État d'Esprit: Devenir une Personne Consciente et PositiveD'EverandLa Pensée Positive en 30 Jours: Manuel Pratique pour Penser Positivement, Former votre Critique Intérieur, Arrêter la Réflexion Excessive et Changer votre État d'Esprit: Devenir une Personne Consciente et PositiveÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Affirmations positives : Perte de poids pour les femmesD'EverandAffirmations positives : Perte de poids pour les femmesPas encore d'évaluation