Vous aimerez peut-être aussi
- Corrigé Série 3Document4 pagesCorrigé Série 3ismail boutzgzaouinePas encore d'évaluation
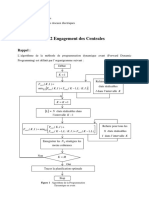
- TP2-Engagement Des CentralesDocument2 pagesTP2-Engagement Des CentralesDerrouch AbderrahmanePas encore d'évaluation
- Feuilleeco 22Document2 pagesFeuilleeco 22djjw kskskPas encore d'évaluation
- Solution TP23 An Num 2019 2020Document11 pagesSolution TP23 An Num 2019 2020saadi khalidaPas encore d'évaluation
- IntroDocument71 pagesIntroDieu merci okolongaPas encore d'évaluation
- 19 DM 7Document3 pages19 DM 7Edward AdounvoPas encore d'évaluation
- Supports de Cours - 134Document14 pagesSupports de Cours - 134Laradj CHELLAMAPas encore d'évaluation
- TDN°1Document4 pagesTDN°1samad marPas encore d'évaluation
- Examen201718 Corrige PDFDocument8 pagesExamen201718 Corrige PDFsamPas encore d'évaluation
- TD 4 Com-Av 2022Document2 pagesTD 4 Com-Av 2022Said OulhoussinePas encore d'évaluation
- 7 ProgDynDocument5 pages7 ProgDynjeanPas encore d'évaluation
- Régulation PID en PositionDocument8 pagesRégulation PID en PositionHachemi Bhe100% (2)
- Solution TPDocument3 pagesSolution TPkhelfaouiislam96Pas encore d'évaluation
- CommandeDocument22 pagesCommandeKhalid TaoutiPas encore d'évaluation
- Sujets Des Concours Doctorat en Electromécanique - Eloued 2022 - 2Document14 pagesSujets Des Concours Doctorat en Electromécanique - Eloued 2022 - 2Master 2 ElectromecaniquePas encore d'évaluation
- Devoir Automatique PDFDocument11 pagesDevoir Automatique PDFredaPas encore d'évaluation
- Pr. SAMIRA BENJELLOUN Exercices MicroéconomieDocument7 pagesPr. SAMIRA BENJELLOUN Exercices Microéconomiehicham.bouarfa204Pas encore d'évaluation
- TD Automatique Chapitre1 2Document9 pagesTD Automatique Chapitre1 2Mouad Ait AyachPas encore d'évaluation
- CORRECTION Theme 5 Equlibre General Eco de ProductionDocument13 pagesCORRECTION Theme 5 Equlibre General Eco de ProductionIsmail El AlamiPas encore d'évaluation
- Compte Rendu: Travaux Pratique AutomatiqueDocument14 pagesCompte Rendu: Travaux Pratique AutomatiqueadnaneadnanePas encore d'évaluation
- CH5 Prob Eco Prod Et Offre-MSE - 2 - 2Document12 pagesCH5 Prob Eco Prod Et Offre-MSE - 2 - 2ELHASSANE AJARCIFPas encore d'évaluation
- TP1 Asservissement ING1 ISIMMDocument8 pagesTP1 Asservissement ING1 ISIMMlahmar RayenPas encore d'évaluation
- 2020 01 Examen Corrige ProbasDocument6 pages2020 01 Examen Corrige ProbasMohamed GOU-ALIPas encore d'évaluation
- ArmaDocument60 pagesArmaOtmane HamdaniPas encore d'évaluation
- Compte Rendu Tp2-1Document15 pagesCompte Rendu Tp2-1Toutou KHATRIPas encore d'évaluation
- Essec Eco 2000Document4 pagesEssec Eco 2000Acrobate SansfamillePas encore d'évaluation
- TP 0Document7 pagesTP 0Fahd OthmanPas encore d'évaluation
- TP 3-ManipDocument2 pagesTP 3-ManipAmina ChelloumPas encore d'évaluation
- Tp3 AMDocument22 pagesTp3 AMLessemico SidimedPas encore d'évaluation
- SMP-S6-Outils Math Et Logiciels-TD2-SolutionDocument5 pagesSMP-S6-Outils Math Et Logiciels-TD2-SolutionnouhailamessaoudyPas encore d'évaluation
- Chap2 Complexité ASD 2Document15 pagesChap2 Complexité ASD 2inesbenlatreche18Pas encore d'évaluation
- Polycopie TD 1997 2008Document21 pagesPolycopie TD 1997 2008walid kahlounPas encore d'évaluation
- Analyse Numérique TDDocument6 pagesAnalyse Numérique TDLilou PtkPas encore d'évaluation
- Mias 302Document168 pagesMias 302Ali EL KSIMIPas encore d'évaluation
- Devoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueDocument8 pagesDevoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueKhmira WafaPas encore d'évaluation
- TD MatlabDocument31 pagesTD MatlabSaad Chakkor100% (2)
- Script Du Programme LFDocument3 pagesScript Du Programme LFZineeddine BouikniPas encore d'évaluation
- Correction-TD11-AF2017 3Document7 pagesCorrection-TD11-AF2017 3Omar KessabPas encore d'évaluation
- TP OssDocument5 pagesTP OssJosephine NoroPas encore d'évaluation
- TP AUtoDocument8 pagesTP AUtoamine cheurfaPas encore d'évaluation
- Corrinfo 04Document3 pagesCorrinfo 04kukis14Pas encore d'évaluation
- TP1 MODELISATION ANALOGIQUE ET SIMULATION DES SYSTEMES ASSERVIS 1er 2ème ET 3ème ORDREDocument9 pagesTP1 MODELISATION ANALOGIQUE ET SIMULATION DES SYSTEMES ASSERVIS 1er 2ème ET 3ème ORDREabdelgoui rymPas encore d'évaluation
- Correction Série 3 (Producteur)Document11 pagesCorrection Série 3 (Producteur)nada naraPas encore d'évaluation
- Cours - Algorithmique - Récursivité - Bac Informatique (2019-2020) MR Kamel Bel AsriDocument13 pagesCours - Algorithmique - Récursivité - Bac Informatique (2019-2020) MR Kamel Bel Asridepayjunior3711Pas encore d'évaluation
- Correction Exam RSD Compl XT 2012Document3 pagesCorrection Exam RSD Compl XT 2012kukis14Pas encore d'évaluation
- Lois Usuelles - SuiteDocument33 pagesLois Usuelles - Suiteamanihanane6Pas encore d'évaluation
- Chapitre 2Document30 pagesChapitre 2eymardaka964Pas encore d'évaluation
- Travaux Pratiques Automatique.....Document17 pagesTravaux Pratiques Automatique.....MOHAMED TAMZAITIPas encore d'évaluation
- Examen 2017Document2 pagesExamen 2017Ahmed RabiiPas encore d'évaluation
- Calculabilite Complexite AlgorithmiqueDocument51 pagesCalculabilite Complexite AlgorithmiqueMohammed Amine BenabdeljalilPas encore d'évaluation
- TP2 CorrigeDocument5 pagesTP2 CorrigeYasser El hattabiPas encore d'évaluation
- Chapitre 2Document13 pagesChapitre 2Mohamed EL hadegPas encore d'évaluation
- Correction 2Document7 pagesCorrection 2Marwa DrihemPas encore d'évaluation
- Chapitre 1 Avec Exemples D'applicationsDocument10 pagesChapitre 1 Avec Exemples D'applicationsMohammed ALMUSHIAAPas encore d'évaluation
- M1103 AMphi04Document34 pagesM1103 AMphi04Florian RizzoPas encore d'évaluation
- Electronique Numérique Logique Combinatoire Et SéquentielleDocument135 pagesElectronique Numérique Logique Combinatoire Et SéquentielleYasser DiabPas encore d'évaluation
- Recueil KarnaughDocument8 pagesRecueil Karnaughdxsszsz100% (1)
- Electronique Numérique Logique Combinatoire Et SéquentielleDocument135 pagesElectronique Numérique Logique Combinatoire Et SéquentielleYasser DiabPas encore d'évaluation
- BOUAZIZ Yanis Hocine CHERGUI AbdallahDocument4 pagesBOUAZIZ Yanis Hocine CHERGUI AbdallahYanis BouazizPas encore d'évaluation
- 1 EXamen S2 Bureautique 2010 2011Document2 pages1 EXamen S2 Bureautique 2010 2011aminePas encore d'évaluation
- Chapitre 2 Signaux Deterministes Temps ContinuDocument14 pagesChapitre 2 Signaux Deterministes Temps ContinuBentchikou MohPas encore d'évaluation
- TD N2 Fiabilité Des Réseaux de Transport Avec SolutionsDocument8 pagesTD N2 Fiabilité Des Réseaux de Transport Avec SolutionsYanis BouazizPas encore d'évaluation
- ch3 AlgebrebooleDocument16 pagesch3 AlgebrebooleMehdi RtbPas encore d'évaluation
- Filtrado Cat FRDocument16 pagesFiltrado Cat FRYanis BouazizPas encore d'évaluation
- TD N3 Indices de Fiabilité en Production RésoluDocument8 pagesTD N3 Indices de Fiabilité en Production RésoluYanis BouazizPas encore d'évaluation
- Chapitre 3-Engagement Des CentralesDocument17 pagesChapitre 3-Engagement Des CentralesYanis BouazizPas encore d'évaluation
- PFEL3 BOUAZIZ Yanis Hocine CHERGUI AbdallahDocument23 pagesPFEL3 BOUAZIZ Yanis Hocine CHERGUI AbdallahYanis BouazizPas encore d'évaluation
- Projet de Fin de Cycle LMI 18Document21 pagesProjet de Fin de Cycle LMI 18Mohamed KabechPas encore d'évaluation
- BHMN 35002 IOM 19538F X 1022 FR FrenchDocument24 pagesBHMN 35002 IOM 19538F X 1022 FR FrenchKais RegaiegPas encore d'évaluation
- 1 Tutoriel SW Sustainability CopieDocument5 pages1 Tutoriel SW Sustainability CopieAli AbdellatifPas encore d'évaluation
- PHILOSOPHIESDocument8 pagesPHILOSOPHIESdannkombila544Pas encore d'évaluation
- Test LPT Belgique B2Document7 pagesTest LPT Belgique B2ABCDGEHPas encore d'évaluation
- Travaux Dirigés de Probabilités Et Statistiques 1 ISTECDocument8 pagesTravaux Dirigés de Probabilités Et Statistiques 1 ISTECChristian BouliPas encore d'évaluation
- Devoir N1 SVT 1AC Semestre 2 Modele 1Document2 pagesDevoir N1 SVT 1AC Semestre 2 Modele 1balbsir GPAAKARCHARKPas encore d'évaluation
- Exercice 4Document2 pagesExercice 4najlae alfathiPas encore d'évaluation
- Analyse Spatiale Et Cartographie de La Régénération Forestière Post-Incendie Dans La Wilaya de TissemsiltDocument88 pagesAnalyse Spatiale Et Cartographie de La Régénération Forestière Post-Incendie Dans La Wilaya de TissemsiltÏnaÿ LïmPas encore d'évaluation
- Grammaire - Le SubjonctifDocument7 pagesGrammaire - Le SubjonctifAurore ThissePas encore d'évaluation
- Climatologie 1 1Document25 pagesClimatologie 1 1Massar SeckPas encore d'évaluation
- Le Sujet D'oubli Selon FreudDocument16 pagesLe Sujet D'oubli Selon FreudBruna RochaPas encore d'évaluation
- 32 530 322 PDFDocument131 pages32 530 322 PDFChokri AtefPas encore d'évaluation
- Le Point BacDocument23 pagesLe Point Bachamd kaborePas encore d'évaluation
- Accueil Intégration D'une Nouvelle RecrueDocument8 pagesAccueil Intégration D'une Nouvelle RecrueSbâîÄhmêdÈlâmînëPas encore d'évaluation
- Compresseur Atlas CopcoDocument202 pagesCompresseur Atlas CopcoPrince Rushdie MongoPas encore d'évaluation
- Cours de Maths Semestre 1Document41 pagesCours de Maths Semestre 1mbnlleilaPas encore d'évaluation
- IEC 60255-3 Electrical Relays - Single Input Energizing Quantity Measuring Relays With DependentDocument22 pagesIEC 60255-3 Electrical Relays - Single Input Energizing Quantity Measuring Relays With DependentĐặng Xuân ViệtPas encore d'évaluation
- Agadir MerkDocument3 pagesAgadir MerkCrea FAbPas encore d'évaluation
- Serie PDFDocument92 pagesSerie PDFAlphonse UrielPas encore d'évaluation
- Presentation CNES 30-01 18Document21 pagesPresentation CNES 30-01 18AS asPas encore d'évaluation
- Problemes cm1 Les Petits DevoirsDocument3 pagesProblemes cm1 Les Petits DevoirsSahim AhmedPas encore d'évaluation
- 4 Manières de Se Connaitre Soi Même - WikihowDocument14 pages4 Manières de Se Connaitre Soi Même - WikihowBreton FLORA SOPHIEPas encore d'évaluation
- Le Réchauffement ClimatiqueDocument2 pagesLe Réchauffement ClimatiqueVictoria CostinPas encore d'évaluation
- Tout Est VibrationDocument27 pagesTout Est Vibrationkhadim gueyePas encore d'évaluation
- Marie CurieDocument59 pagesMarie CurieJude KokoloPas encore d'évaluation
- Développement Durable Et Territoire - Chapitre 30. Tourisme Et Développement Durable - Presses Universitaires Du SeptentrionDocument23 pagesDéveloppement Durable Et Territoire - Chapitre 30. Tourisme Et Développement Durable - Presses Universitaires Du Septentrionbahy mohamedPas encore d'évaluation
- Ecodev Prof Nyembo 2009-1-1Document160 pagesEcodev Prof Nyembo 2009-1-1johnprince mukendiPas encore d'évaluation
- Physique 2 Électricité Et Magnétisme Serway Chapitre 6 Solutions DétailléesDocument59 pagesPhysique 2 Électricité Et Magnétisme Serway Chapitre 6 Solutions DétailléesDavePas encore d'évaluation
- Chapitre 1 - Eléments de Calcul VectorielDocument23 pagesChapitre 1 - Eléments de Calcul VectorielTaki Benazzouz100% (2)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Le Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsD'EverandLe Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsÉvaluation : 4 sur 5 étoiles4/5 (2)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Le money management facile à apprendre: Comment tirer profit des techniques et stratégies de gestion de l'argent pour améliorer l'activité de trading en ligneD'EverandLe money management facile à apprendre: Comment tirer profit des techniques et stratégies de gestion de l'argent pour améliorer l'activité de trading en ligneÉvaluation : 3 sur 5 étoiles3/5 (3)
- Dans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellD'EverandDans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Le marketing d'affiliation en 4 étapes: Comment gagner de l'argent avec des affiliés en créant des systèmes commerciaux qui fonctionnentD'EverandLe marketing d'affiliation en 4 étapes: Comment gagner de l'argent avec des affiliés en créant des systèmes commerciaux qui fonctionnentPas encore d'évaluation
- Le trading des bandes de bollinger facile à apprendre: Comment apprendre à utiliser les bandes de bollinger pour faire du commerce en ligne avec succèsD'EverandLe trading des bandes de bollinger facile à apprendre: Comment apprendre à utiliser les bandes de bollinger pour faire du commerce en ligne avec succèsÉvaluation : 5 sur 5 étoiles5/5 (1)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)